Clear Sky Science · pl
Zsynchronizowany czasowo wieloczułnikowy zestaw danych dronów pozyskany z wielu radarów i odbiornika RF
Dlaczego warto patrzeć w niebo
Drony szybko przeszły ze zabawek i narzędzi filmowych do ważnych maszyn wykorzystywanych w dostawach, inspekcjach, rolnictwie i innych zastosowaniach. Jednak te same małe statki powietrzne, które nam pomagają, mogą być nadużywane do szpiegostwa, przemytu, a nawet ataków. Powstrzymywanie niebezpiecznych dronów jest trudne, ponieważ są niewielkie, szybkie i często latają w zagraconych, realistycznych scenach. Ten artykuł przedstawia nowy, otwarty zestaw danych, który pomaga naukowcom i inżynierom budować inteligentniejsze systemy do wykrywania, śledzenia i identyfikacji dronów, wykorzystując ich niewidzialne radiowe odciski palców zamiast wyłącznie wyglądu czy dźwięku.
Słuchanie dronów niewidzialnymi falami
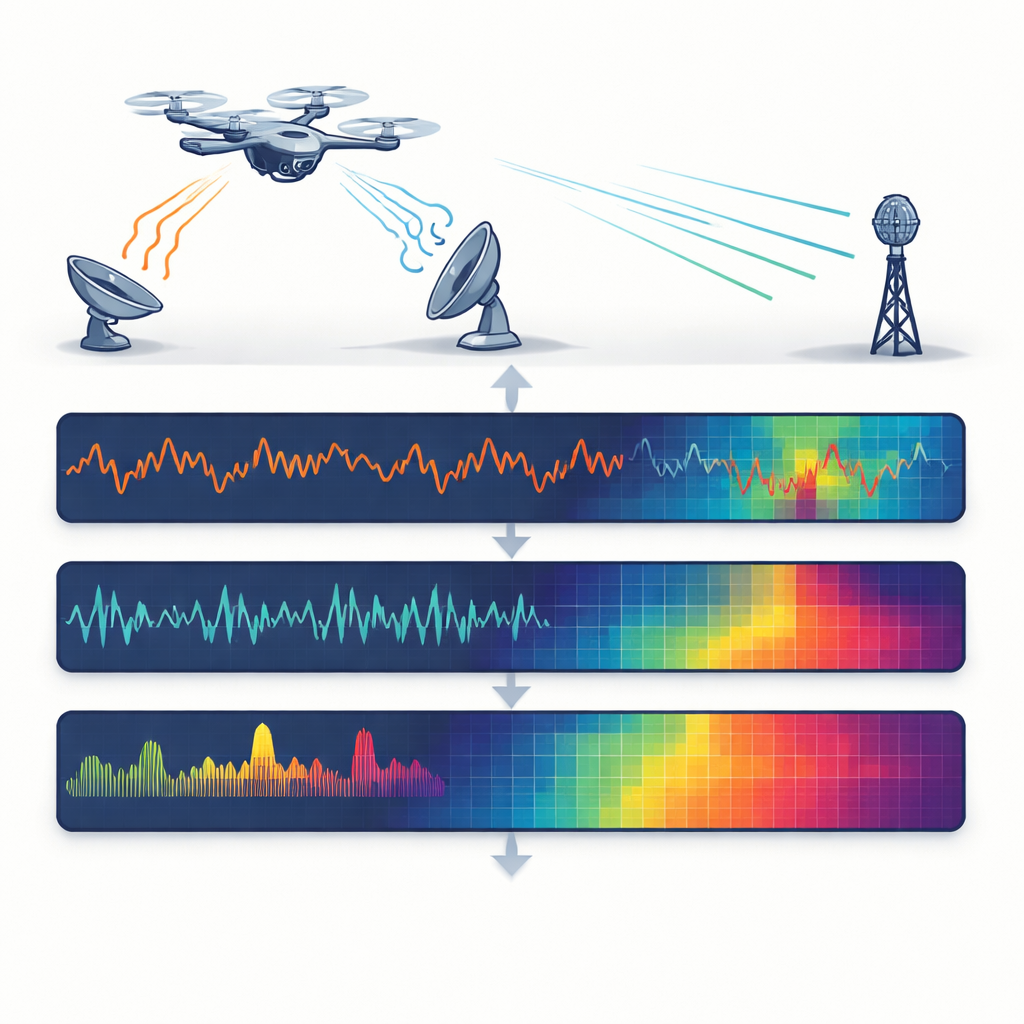
Zamiast polegać na kamerach czy mikrofonach, badacze skupiają się na falach radiowych, które działają dzień i noc oraz w mgle, deszczu czy przy olśnieniu. Używają trzech różnych czujników radiowych jednocześnie: jednego radaru wysyłającego stały ton do wykrywania ruchu, drugiego radaru skanującego częstotliwość, by mierzyć jednocześnie odległość i prędkość, oraz odbiornika radiowego, który po prostu nasłuchuje sygnałów sterowania i wideo pochodzących od drona. Każdy czujnik widzi drona w inny sposób — poprzez drobne drgania wirujących łopat wirnika, zmianę odległości od sensora lub strukturę łącza bezprzewodowego — podobnie jak połączenie wzroku, słuchu i dotyku daje pełniejszy obraz.

Budowa starannie kontrolowanego poligonu testowego
Aby stworzyć wiarygodne dane, zespół latał czterema popularnymi dronami komercyjnymi i umieścił prosty metalowy reflektor kątowy jako niemający drona punkt odniesienia na otwartym polu wolnym od dużych budynków. Wszystkie obiekty hoverowały na tej samej wysokości i były skierowane w stronę grupy czujników zamocowanych razem na statywach, dzięki czemu każde urządzenie obserwowało scenę pod niemal identycznym kątem. Drony mierzono w odległościach od 2 do 30 metrów co 2 metry, z 500 powtórzonymi nagraniami dla każdej kombinacji typu drona, odległości i sensora. Tak przemyślany projekt pozwala badać, jak wykrywanie zmienia się wraz ze wzrostem dystansu, oraz porównywać różne modele różniące się rozmiarem, wagą i konstrukcją.
Synchronizacja oddechu różnych sensorów
Kluczową zaletą zestawu danych jest to, że trzy sensory są zsynchronizowane czasowo za pomocą oprogramowania. Wszystkie urządzenia są sterowane przez jeden program kontrolny, który uruchamia je jednocześnie i zapisuje ich wyjścia krok w krok. Każde nagranie z jednego sensora ma odpowiadające mu nagranie z pozostałych, wyrównane wspólnym indeksem zamiast skomplikowanych zegarów sprzętowych. Dla dwóch radarów system przechwytuje albo surowe sygnały, albo przetworzone mapy pokazujące rozkład odbitej energii w zależności od odległości i prędkości. Dla odbiornika radiowego przechowywany jest surowy sygnał komunikacyjny. Ta wspólna synchronizacja pozwala badaczom bezpośrednio łączyć informacje z różnych sensorów — korelując na przykład migotanie ruchu wirnika z wybuchem aktywności w łączu sterowania — bez konieczności mozolnego dopasowywania danych później.
Od surowych fal do obrazów gotowych dla maszyn
Ponieważ współczesne narzędzia wykrywania często opierają się na głębokim uczeniu, autorzy konwertują również surowe pomiary na widoki przypominające obrazy, które komputery łatwo przetworzą. Dla radaru o stałym tonie wydobywają wzory częstotliwościowe generowane przez obracające się śmigła, znane jako mikroruchy, i przedstawiają je jako proste widma. Dla radaru skanującego tworzą kolorowe obrazy odległość–prędkość, które uwypuklają, gdzie i jak porusza się dron, po odcięciu tła. Dla odbiornika radiowego obliczają rozkład mocy w funkcji częstotliwości, tworząc odciski palców stylu komunikacji każdego drona. Każdy surowy plik ma odpowiadający mu plik obrazowy, dzięki czemu naukowcy mogą wybrać, czy pracować na poziomie sygnału, czy bezpośrednio podłączyć się do standardowych sieci neuronowych operujących na obrazach.
Dowód, że więcej oczu daje przewagę
Aby wykazać, że zestaw danych jest nie tylko interesujący, ale i użyteczny, zespół wytrenował znaną sieć rozpoznawania obrazów osobno na obrazach z każdego sensora, a następnie na zintegrowanych kombinacjach wszystkich trzech. Jak przewidywano, radary radzą sobie gorzej wraz ze wzrostem odległości: odbite sygnały słabną, a dokładność klasyfikacji spada. Odbiornik radiowy utrzymuje lepszą wydajność na większym dystansie, ale niektóre drony korzystają z prawie identycznych pasm komunikacyjnych i trudno je rozróżnić tylko za pomocą tego sensora. Gdy badacze łączą trzy perspektywy w pojedyncze skompozytowane wejścia, wydajność poprawia się we wszystkich przypadkach, szczególnie dla mniejszych, trudniejszych do wykrycia dronów. To pokazuje, że zsynchronizowana wieloczułnikowa informacja może zrekompensować słabe punkty pojedynczego urządzenia.
Co to oznacza dla bezpieczniejszej przestrzeni powietrznej
W prostych słowach, autorzy zbudowali szczegółowy, publiczny „poligon treningowy”, na którym inteligentne algorytmy mogą uczyć się rozpoznawać drony, korzystając jednocześnie z wielu rodzajów radiowych „oczu”. Udostępniając zarówno surowe sygnały, jak i gotowe obrazy oraz przykładowy kod, obniżają barierę wejścia dla innych, którzy chcą projektować systemy wykrywania działające niezawodnie w zmiennych warunkach i na różnych odległościach. Z czasem narzędzia oparte na tym zestawie danych mogą pomóc lotniskom, obiektom krytycznym i władzom miejskim lepiej rozróżniać drony przyjazne od podejrzanych, czyniąc przestrzeń powietrzną na niskich wysokościach bezpieczniejszą bez polegania wyłącznie na kamerach czy obserwatorach.
Cytowanie: Han, SK., Jung, YH. A Time-Synchronized Multi-Sensor drone dataset acquired from multiple radars and RF receiver. Sci Data 13, 407 (2026). https://doi.org/10.1038/s41597-026-06802-6
Słowa kluczowe: wykrywanie dronów, sensoryka radarowa, sygnały radiowe, fuzja sensorów, otwarty zestaw danych