Clear Sky Science · pl
Otwarty zestaw referencyjny danych do uczenia maszynowego i inteligentnej optymalizacji trajektorii w bezzałogowych systemach lotniczych o stałym skrzydle
Dlaczego inteligentniejsze loty dronów mają znaczenie
Od przeglądów upraw po poszukiwanie i ratownictwo — drony o stałym skrzydle coraz częściej wykonują ważne zadania wysoko nad naszymi głowami. Uczynienie tych statków powietrznych bardziej niezawodnymi i mniej zależnymi od pilotów mogłoby umożliwić bezpieczniejsze dostawy, precyzyjniejsze monitorowanie środowiska oraz bardziej odporne operacje w sytuacjach awaryjnych czy strefach konfliktu. Postęp coraz częściej hamuje jednak nie brak pomysłów, lecz niedostatek danych z realnych operacji. Artykuł przedstawia nowy otwarty zbiór danych obejmujący setki autonomicznych lotów, zaprojektowany tak, by inżynierowie i studenci na całym świecie mogli rozwijać i testować inteligentniejsze algorytmy lotu na tej samej, bogatej podstawie.
Pływające laboratorium dla misji w rzeczywistych warunkach
Autorzy zbudowali swój zbiór danych, wykorzystując solidny samolot w stylu „motor‑glider” o nazwie Volantex Ranger 2400. Ze skrzydłami o rozpiętości dwóch i pół metra, wydajnym profilem i pojemnym kadłubem, maszyna może zabrać nowoczesną elektronikę i pozostawać w powietrzu przez długie, stabilne misje. Napęd stanowi tylno zamontowany silnik elektryczny oraz niestandardowy pakiet baterii litowo‑jonowych zoptymalizowany pod kątem wytrzymałości zamiast krótkotrwałej mocy. Zespół latał tą platformą w trybie w pełni autonomicznym, korzystając z zaplanowanych tras obejmujących kluczowe fazy lotu: start, odcinki przelotowe, ciasne zakręty, dynamiczne manewry i automatyczne lądowania. Tak kontrolowane, lecz realistyczne środowisko zamienia Ranger w latające laboratorium, które zachowuje się jak małe drony operacyjne używane w zastosowaniach cywilnych i obronnych.
Dwa mózgi, jeden samolot
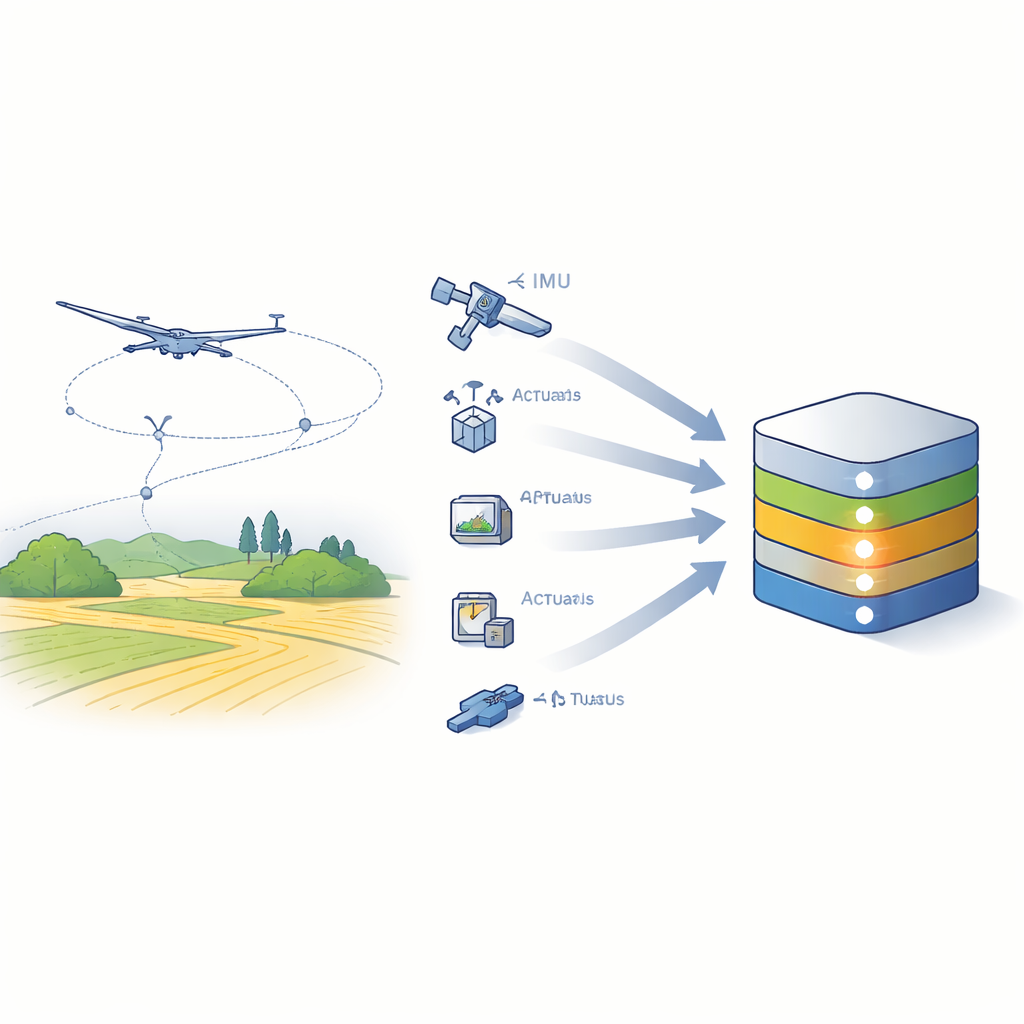
Aby objąć szeroki zakres przypadków użycia, badacze wyposażali tę samą konstrukcję w dwa bardzo różne „mózgi”. Jedna konfiguracja wykorzystuje kompaktowy, niedrogi kontroler lotu SpeedyBee F405, podobny duchem do elektroniki, jaką hobbystycznie montuje się w dronach budowanych samodzielnie. Druga łączy profesjonalny autopilot Pixhawk 6X z potężnym komputerem Jetson Orin NX, zdolnym do uruchamiania wymagającego oprogramowania sztucznej inteligencji na pokładzie. Oba systemy rejestrują szczegółową telemetrię, w tym dane z czujników bezwładnościowych, pozycję i prędkość GPS, wysokość, prędkość względem powietrza, polecenia powierzchni sterowych, stan baterii i tryb lotu, z częstotliwościami wystarczającymi do odtworzenia ruchu statku powietrznego w drobnych szczegółach. Utrzymując ten sam kadłub przy wymianie elektroniki, zbiór danych pozwala badaczom badać, jak różne poziomy mocy obliczeniowej i sensoryki na pokładzie wpływają na zachowanie lotu.
Co zawiera zbiór danych
Powstała kolekcja IDF‑DS obejmuje 240 autonomicznych lotów, około 32 godzin czasu w powietrzu i dziesiątki milionów zarejestrowanych próbek. Każdy lot zapisano z zachowaniem spójnej struktury folderów, dzięki czemu użytkownicy szybko odnajdą główny log, plan misji, ustawienia kontrolera i gotowy do przeglądu ślad GPS. Jedna grupa misji przebiega w zygzakowaty sposób nad prostokątnym polem, idealna do powtarzalnych porównań lub trenowania modeli predykcyjnych. Inna odwzorowuje pętlę przypominającą tor wyścigowy znany z MotoGP, wprowadzając ostre zakręty, łagodne łuki i proste odcinki, które wystawiają autopilota na próbę. Dla każdej konfiguracji i misji logi odzwierciedlają, jak samolot faktycznie latał, a nie tylko jak miał lecieć.
Przekształcanie surowych lotów w wnioski
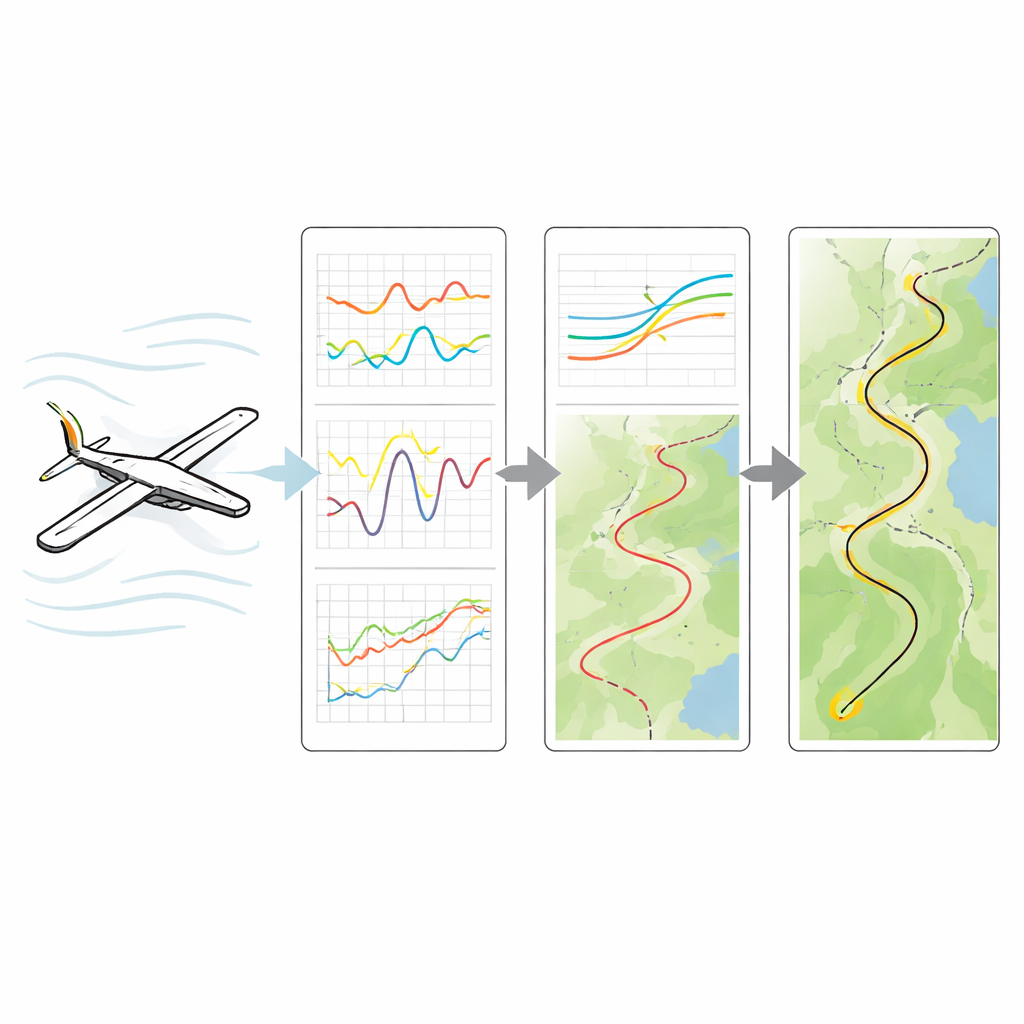
Aby pokazać, co można zrobić z tym zasobem, autorzy przechodzą przez kilka przykładowych analiz. Sprawdzają jakość danych z czujników ruchu na pokładzie, porównując je z przyspieszeniami i obrotami wyprowadzonymi z trajektorii opartej na GPS, potwierdzając, że pomiary są wystarczająco wiarygodne, by służyć jako „prawda ziemi” do trenowania modeli. Badają, jak dobrze autopilot estymuje prędkość w trzech kierunkach, jak ściśle samolot podąża za zaplanowaną trasą oraz ile energii elektrycznej pobiera podczas wznoszeń, zakrętów i stabilnego przelotu. Łącząc prędkość względem powietrza, prędkość względem gruntu i orientację, rekonstruują nawet wiatr, którego doświadczył samolot na swojej trasie, kreśląc obraz porywów i bocznych wiatrów wyłącznie na podstawie odczytów pokładowych. Inny scenariusz użycia pokazuje, jak te same strumienie danych mogą posłużyć do trenowania modelu sztucznej inteligencji szacującego pozycję, gdy nawigacja satelitarna jest niedostępna.
Jak to narzędzie pomaga przyszłym lotom
W praktycznym ujęciu praca polega na udostępnieniu społeczności wspólnej „czarnej skrzynki” z setek lotów, którą każdy może otworzyć. Zamiast każdemu zespołowi zbierać własne kosztowne dane testowe i trzymać je w prywatności, badacze i studenci mogą pobrać ten otwarty zbiór i od razu zacząć badać nowe sposoby utrzymania dronów na kursie, gdy GPS zawiedzie, wykrywania usterek zanim staną się niebezpieczne, czy wydłużania żywotności baterii przez wybór bardziej efektywnych tras. Sam artykuł nie tworzy tych inteligentnych systemów; tworzy podstawę, której one potrzebują. Dla czytelników wniosek jest prosty: postęp w autonomii lotniczej zależy teraz równie mocno od otwartych, starannie udokumentowanych zapisów lotów, co od sprytnych algorytmów — a ten zbiór danych stanowi istotny krok w tym kierunku.
Cytowanie: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Słowa kluczowe: drony o stałym skrzydle, telemetria lotu, nawigacja autonomiczna, zbiór danych do uczenia maszynowego, optymalizacja trajektorii