Clear Sky Science · pl
Skalowalna, miejscowa produkcja multimodalnej elektronicznej skóry dla inteligentnej robotyki i systemów interaktywnych
Wyposażenie robotów i zabawek w zmysł dotyku
Wyobraź sobie robota, który potrafi delikatnie unieść kromkę gorącego tostu, nie miażdżąc jej ani nie poparząc ręki, albo zabawkę, która reaguje inaczej, gdy przytulasz ją, zginasz jej ucho lub ogrzewasz dłonią. Niniejsze badanie opisuje nowy rodzaj „elektronicznej skóry”, który przybliża te pomysły do rzeczywistości, dostarczając maszynom bogatszy, bardziej ludzki zmysł dotyku i bliskiego otoczenia.
Dlaczego maszyny potrzebują lepszego dotyku
Dzisiejsze roboty i gadżety wciąż są nieporadne w kontakcie ze światem rzeczywistym. Wiele potrafi wykrywać tylko jedną wielkość, np. nacisk, i często opiera się na masywnych, ręcznie montowanych elementach, które trudno jest skalować. Tymczasem ludzka skóra nieustannie łączy wiele sygnałów jednocześnie: delikatny dotyk, mocny nacisk, rozciąganie, ciepło, a nawet wyczucie odległości obiektów zanim nastąpi kontakt. Autorzy tej pracy postawili sobie za cel zbudowanie elektronicznej wersji skóry, która potrafi jednocześnie rejestrować kilka z tych doznań, będąc przy tym cienka, elastyczna i łatwa do dostosowania do różnych zadań.
Budowa cienkiego, elastycznego zmysłu dotyku
Zespół stworzył niskoprofilową „e-skórę” wykorzystując proces wolny od pracowni czystych, który można skalować i szybko adaptować. W jej rdzeniu znajduje się elastyczny obwód z miedzi wytrawiany laserem ultrafioletowym, działający jak okablowanie na płytce drukowanej, lecz zdolny do zginania i oplatania krzywizn. Nad i pod tym obwodem umieszczono miękką warstwę silikonu pełną maleńkich porów powietrznych, podobną do gąbki. Zewnętrzne powierzchnie pokryto cienką warstwą nanorurek węglowych, tworząc przewodzące pokrycie, które jednocześnie chroni urządzenie przed zakłóceniami elektrycznymi i służy jako wspólny odniesieniowy poziom pomiarowy. Taka struktura pozwala, by każda płytka czujnikowa zachowywała się jak mały kondensator elektryczny, którego wartość zmienia się, gdy materiał jest naciskany, zginany, ogrzewany lub zbliżany do obiektu. Dodatkowe drobne układy scalone zamontowane na tym samym elastycznym obwodzie mierzą temperaturę i odległość bez kontaktu, więc cały arkusz naśladuje nie tylko czujniki nacisku i rozciągania skóry, ale także wyczucie ciepła i „bliskiego wzroku”. 
Jak czujniki wyczuwają nacisk i ruch
Elementy e-skóry reagujące na nacisk i zginanie zaprojektowano tak, by silnie odpowiadały na niewielkie zmiany przy zachowaniu trwałości. Gdy coś naciska, pory w miękkiej warstwie się ściskają, zbliżając wewnętrzne warstwy metalowe i zastępując powietrze większą ilością silikonu. Oba efekty podwyższają sygnał elektryczny, zwłaszcza przy niskich ciśnieniach, gdzie materiał najłatwiej się ugina. Testy wykazały, że e-skóra potrafi wykrywać bardzo delikatne dotknięcia, nawet rzędu kilkudziesięciu paskali, z szybką odpowiedzią i niewielkim dryftem nawet po dziesięciu tysiącach cykli nacisk–zwolnienie. Gdy arkusz się zgina, owija się wokół wewnętrznego okablowania, ponownie zmniejszając odstęp między warstwami po jednej stronie i zwiększając sygnał. Odpowiedź rośnie wyraźniej przy większych kątach zgięcia, co odpowiada temu, że rzeczywiste zgięcia mają tendencję do lokalizowania się w jednym obszarze, a nie rozprzestrzeniania równomiernie. Ogólnie projekt godzi miękkość, stabilność i czułość bez skomplikowanych struktur warstwowych stosowanych w wielu wcześniejszych urządzeniach. 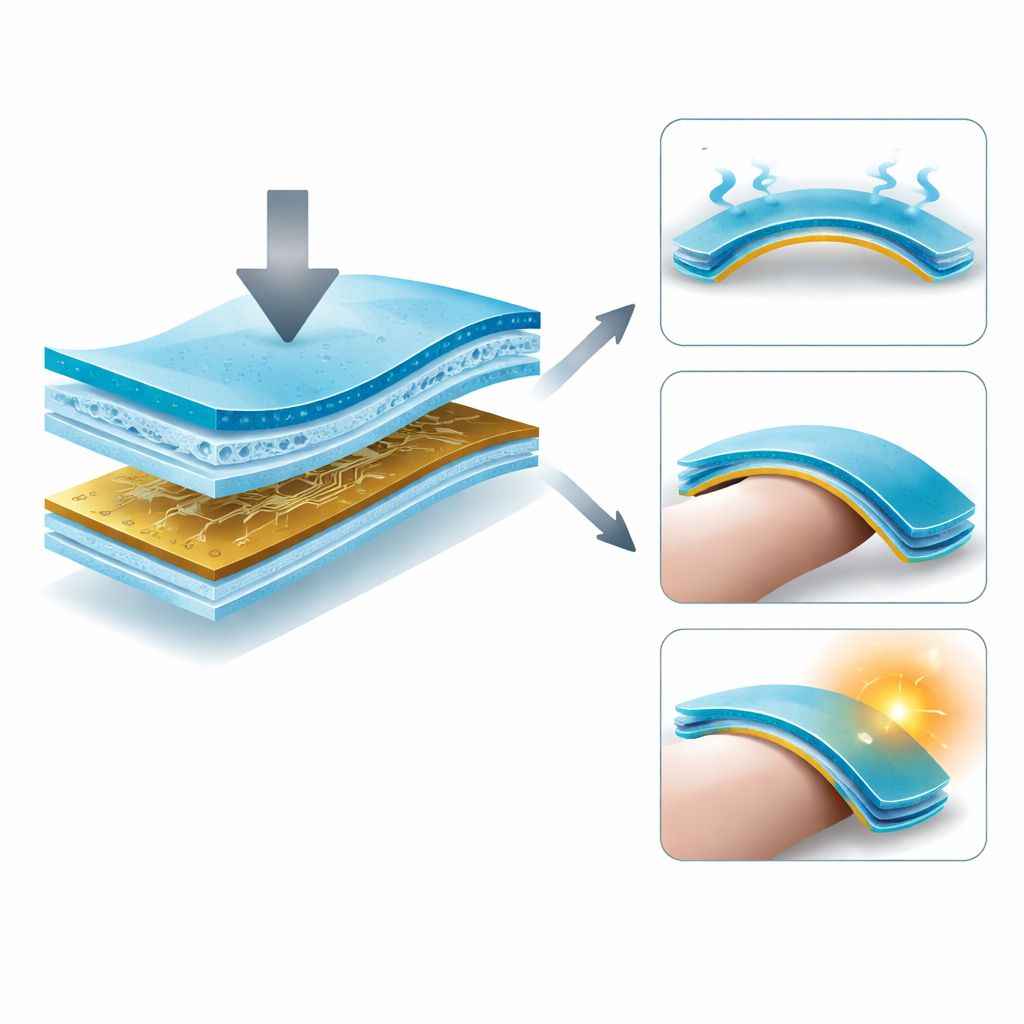
Od robotów kuchennych po zabawnych towarzyszy
Aby pokazać możliwości e-skóry, badacze owinęli nią chwytak robotyczny i powierzyli robotowi zadanie kuchenne. Gdy chwytak zbliża się do gorącego kawałka chleba, mały moduł pomiaru głębokości osadzony w skórze najpierw mapuje odległość obiektu, pomagając robotowi ustawić palce przed dotykiem. Po nawiązaniu kontaktu czujniki nacisku i zginania sterują siłą ścisku, zapobiegając poślizgom lub zgnieceniu chleba. Czujnik temperatury na tej samej warstwie sprawdza, kiedy chleb wystygnie na tyle, by można go bezpiecznie podać człowiekowi. W innym przykładzie zespół wykonał miękką zabawkę w kształcie słonia pokrytą e-skórą. Naciśnięcie klatki zmienia rytm ukrytego silnika wibracyjnego, tak by przypominał bicie serca, zgięcie ucha wyzwala dźwięk, a ciepło dłoni może podświetlić policzki zabawki, przekształcając dotyk w zabawną, emocjonalną interakcję.
Widzenie wzorców nacisku na powierzchni
Ponad pojedynczymi punktami, ta sama metoda produkcji może tworzyć duże matryce czujników nacisku, które odczytują, gdzie i z jaką siłą powierzchnia jest dotykana. Zespół zaprezentował siatkę 8 na 15 działającą jak kamera nacisku: gdy palce, ciężarki lub odciśnięte kształty naciskają, system rekonstruuje wzorzec sił, a nawet rozpoznaje kontury, takie jak litery. Możliwość rejestrowania map nacisku i środków ciężkości mogłaby pomóc robotom w równoważeniu ładunków, rozpoznawaniu obiektów lub służyć jako inteligentne platformy wagowe i powierzchnie interaktywne. Ponieważ proces produkcji jest szybki i modułowy, projektanci mogą regulować rozmiar, odstępy i miękkość pikseli czujnikowych dla różnych zastosowań — od inteligentnych mebli po maty monitorujące postawę.
Co to oznacza dla codziennej technologii
Łącząc wiele trybów pomiarowych — nacisk, zginanie, ciepło i bliskość — w jedną cienką i łatwo dostosowywalną warstwę, ta praca przybliża elektroniczną skórę do subtelnych możliwości skóry ludzkiej. Choć jest pole do poprawy przy bardzo wysokich ciśnieniach oraz do zautomatyzowania niektórych etapów montażu, podejście już teraz pokazuje, że bogate odczuwanie dotyku można dodać do robotów, zabawek i innych urządzeń bez ciężkiego, ręcznie budowanego sprzętu. W praktyce może to doprowadzić do domowych robotów, które bezpieczniej obchodzą się z delikatnymi przedmiotami, medycznych urządzeń noszonych bardziej komfortowo rejestrujących kontakt z ciałem oraz produktów interaktywnych, które reagują na nasz dotyk w znacznie bardziej naturalny sposób.
Cytowanie: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Słowa kluczowe: elektroniczna skóra, czucie dotykowe, elastyczne czujniki, chwytak robotyczny, urządzenia interaktywne