Clear Sky Science · pl
Porównanie strategii sterowania klinostatem w celu uzyskania symulowanej mikrograwitacji z równomiernym rozkładem wektora grawitacji
Dlaczego naukowcy ziemscy interesują się nieważkością
Kosmos zmienia organizmy żywe w zaskakujący sposób — od osłabienia kości i mięśni po modyfikacje komórek układu odpornościowego. Aby zrozumieć te efekty, badacze muszą wystawiać komórki, rośliny i małe zwierzęta na nieważkość przez godziny, dni lub nawet tygodnie. Rzeczywisty lot kosmiczny jest jednak kosztowny i rzadki. Artykuł ten bada, jak ulepszyć stołowe urządzenie zwane klinostatem, aby lepiej naśladowało mikrograwitację na Ziemi, dzięki czemu eksperymenty laboratoryjne mogą wierniej odzwierciedlać te prowadzone na Międzynarodowej Stacji Kosmicznej.
Obracając się ku sztucznej nieważkości
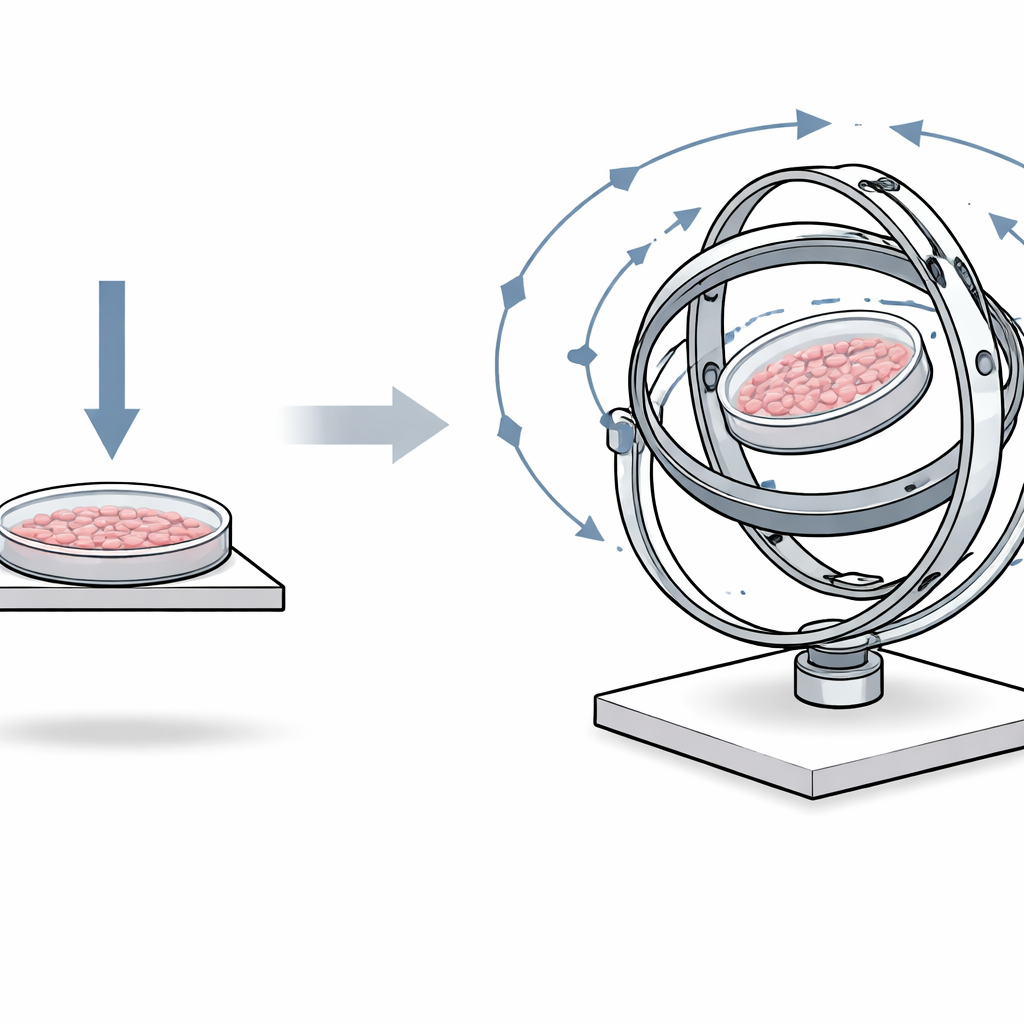
Klinostat stara się „wyłączyć” grawitację nie przez jej usunięcie, lecz przez ciągłe zmienianie kierunku, z którego działa. Próbki umieszczone są na małej wewnętrznej platformie napędzanej przez dwa prostopadłe silniki. W miarę jak platforma się przechyla i obraca, z perspektywy próbki kierunek grawitacji przemieszcza się przez wszystkie możliwe kąty. Z upływem czasu te zmiany mogą się uśredniać do niemal zerowego efektu netto, stanu znanego jako czasowo uśredniona symulowana mikrograwitacja. Wcześniejsze badania wykazały, że komórki i rośliny w takich warunkach mogą zachowywać się bardzo podobnie do zachowań w rzeczywistej przestrzeni kosmicznej, co czyni klinostaty cennym narzędziem w biologii kosmicznej.
Ukryty problem — gorące punkty grawitacji
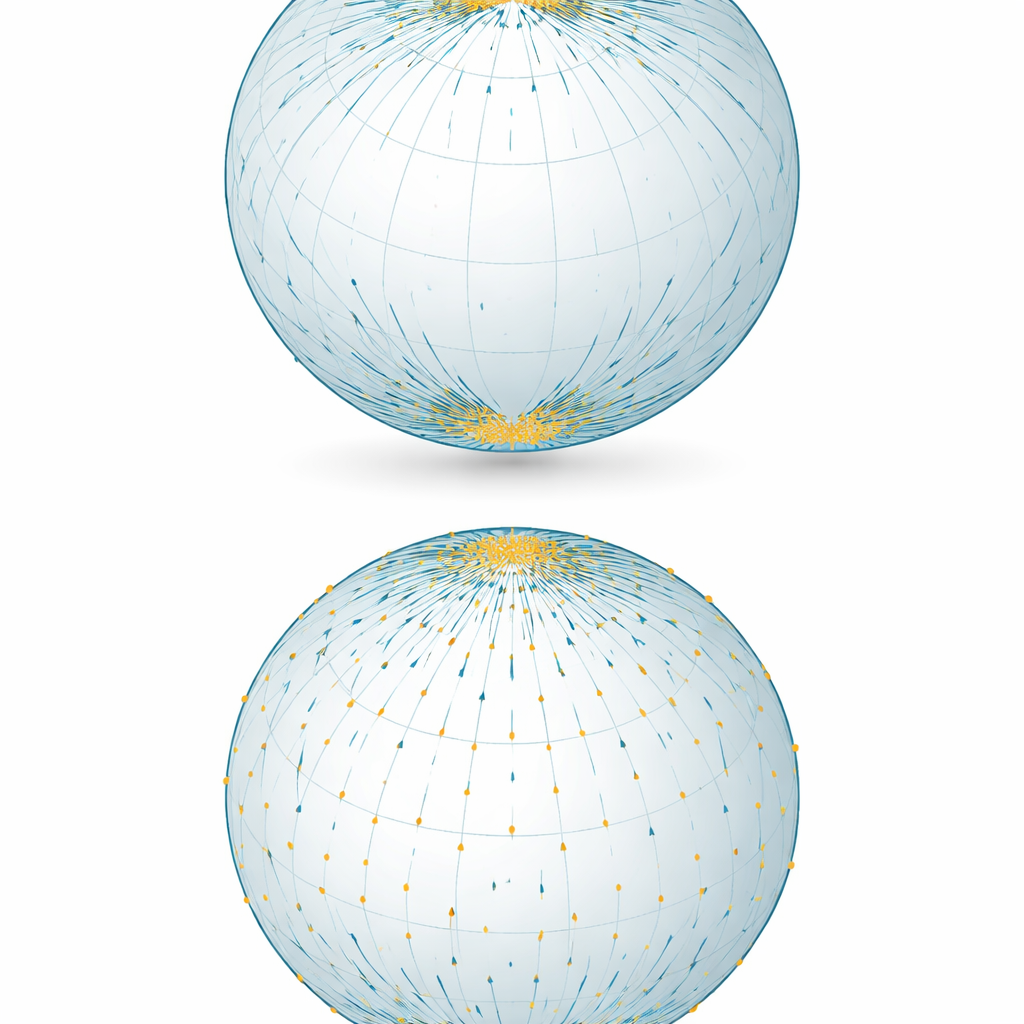
Jest jednak haczyk. Z powodu geometrii obracających się układów pozorny kierunek grawitacji nie rozkłada się równomiernie po wszystkich kątach. Gdy zewnętrzny silnik kręci się ze stałą prędkością, kierunek grawitacji spędza zbyt dużo czasu w dwóch przeciwległych obszarach na wyimaginowanej sferze reprezentującej wszystkie orientacje. Te „bieguny” stają się gorącymi punktami grawitacji. Nawet jeśli średnie oddziaływanie w ciągu wielu godzin jest zbliżone do zera, próbka wielokrotnie odczuwa grawitację częściej z tylko dwóch kierunków zamiast ze wszystkich kierunków równomiernie. Wiele badań z użyciem klinostatów albo nie zauważyło tego problemu, albo próbowało go rozwiązać poprzez losowe zmiany prędkości obrotu, ale autorzy wykazują, że sama losowość nie usuwa tej nierównomierności.
Projektowanie inteligentniejszego wzorca obrotu
Zespół porównał cztery sposoby napędzania zewnętrznego silnika klinostatu: stałą prędkość, prędkości wybierane losowo w zadanym zakresie, prosty wzorzec sinusoidalny, w którym prędkość przyspiesza i zwalnia zależnie od kąta, oraz specjalnie skonstruowany wzorzec „sinusoidy odwrotnej” oparty na dokładnym sposobie, w jaki zmienia się pole powierzchni na sferze. Korzystając z symulacji komputerowych, śledzili, gdzie w czasie lądował kierunek grawitacji i zdefiniowali dwie numeryczne miary: jak bardzo był skoncentrowany w obszarach polarnych oraz jak równomiernie rozkładał się po różnych pasach „szerokości geograficznej” na sferze. Mierzyli też, ile czasu każda strategia potrzebowała, aby obniżyć czasowo uśrednioną grawitację poniżej jednej tysięcznej grawitacji ziemskiej — powszechnie stosowanego standardu dla eksperymentów symulowanej mikrograwitacji.
Spłaszczanie biegunów bez utraty mikrograwitacji
Wyniki były jednoznaczne. Zarówno strategie ze stałą prędkością, jak i z prędkościami losowymi dawały silne bieguny: kierunek grawitacji był nawet około piętnaście razy bardziej zagęszczony w rejonach polarnych niż średnio. Podejście losowe rozbijało proste powtarzające się trajektorie, ale pozostawiało ogólną nierównomierność niemal niezmienioną. Prosty wzorzec sinusoidalny pomagał częściowo, jednak gdy zwiększano różnicę między minimalną a maksymalną prędkością, aby zredukować bieguny, przesuwał rozkład grawitacji w drugą stronę — powodując niedoreprezentowanie niektórych obszarów średnich szerokości geograficznych i nadreprezentację rejonów niskich szerokości. W przeciwieństwie do tego wzorzec odwrotnej sinusoide — gdzie silnik porusza się szybciej w pobliżu biegunów i wolniej przy równiku, w precyzyjnie dobrany sposób matematyczny — zmniejszył koncentrację biegunową do poziomów bliskich jednorodności, gdy stosunek prędkości maksymalnej do minimalnej był wystarczająco wysoki. Chociaż ta strategia wydłużała czas osiągnięcia bardzo niskiej średniej grawitacji (do około sześciu godzin i nie szybciej), to opóźnienie jest niewielkie dla typowych eksperymentów trwających dwanaście godzin lub dłużej.
Przetestowanie teorii w rzeczywistym urządzeniu
Aby sprawdzić, czy te korzyści utrzymują się poza komputerem, autorzy zbudowali dwukołowy klinostat z użyciem dostępnych komercyjnie serwomotorów i czujników. Prowadzili zewnętrzny silnik według wzorca odwrotnej sinusoide przy kilku stosunkach prędkości i rejestrowali ruch układu na dwa niezależne sposoby: odczytując enkodery silników oraz mierząc orientację za pomocą czujnika inercyjnego zamontowanego na obracającym się wewnętrznym etapie. Obie metody dobrze zgadzały się z symulacjami, z różnicami rzędu kilku procent. W miarę zwiększania stosunku prędkości obserwowane bieguny grawitacyjne słabły zgodnie z przewidywaniami. Czasowo uśredniona grawitacja w rzeczywistej maszynie nie osiągnęła całkowicie ścisłego celu jednej tysięcznej grawitacji ziemskiej z powodu drobnych nierówności mechanicznych, ale zachowanie w ciągu pierwszych kilku godzin nadal odzwierciedlało teoretyczny trend.
Co to oznacza dla przyszłych badań biologii kosmicznej na Ziemi
Dla badaczy polegających na naziemnych substytutach lotów kosmicznych przekaz jest prosty: sposób obracania klinostatem ma równie duże znaczenie jak prędkość obrotu. Samo obracanie ze stałą prędkością lub losowe wahańie prędkości pozostawia ukryte gorące punkty grawitacji, które mogą wpływać na reakcje komórek i tkanek. Poprzez staranne kształtowanie ruchu tak, aby platforma szybko przesuwała się przez rejony polarnych kierunków i zwalniała tam, gdzie pole powierzchni jest większe, eksperymentatorzy mogą zapewnić swoim próbkom znacznie bardziej równomierne doświadczanie wszystkich możliwych kierunków „dół”. Badanie sugeruje, że przyjęcie tej strategii sterowania typu odwrotnej sinusoide uczyni eksperymenty na klinostatach lepszymi substytutami życia na orbicie, bez dodawania znacznej złożoności mechanicznej ani drastycznego wydłużenia czasu eksperymentu.
Cytowanie: Kim, Y.J., Park, S. & Kim, S. Comparison of clinostat control strategies to achieve simulated microgravity with uniform gravity vector distribution. npj Microgravity 12, 21 (2026). https://doi.org/10.1038/s41526-026-00570-8
Słowa kluczowe: symulowana mikrograwitacja, klinostat, rozkład wektora grawitacji, biologia kosmiczna, algorytmy sterowania