Clear Sky Science · pl
Biomimetyczny siłownik wykonany z nanokompozytu polimeru ferroelectricznego o właściwościach relaxor
Maleńkie roboty poruszające się jak prawdziwe owady
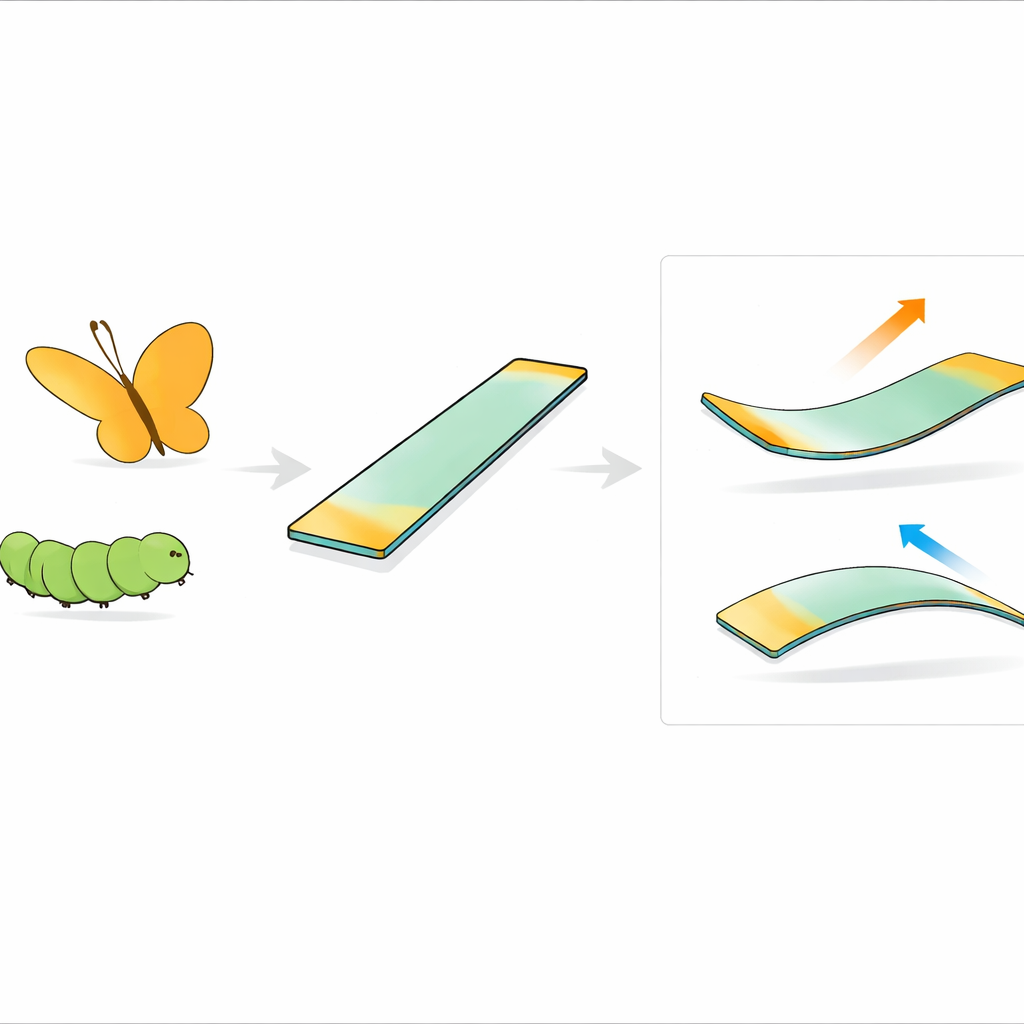
Wyobraź sobie robota wielkości gąsienicy, który potrafi pełznąć po nierównym terenie, albo urządzenie przypominające motyla, które macha skrzydłami i unosi się z ziemi — a wszystko to wykonane z jednej, papierowo cienkiej warstwy plastiku i zużywające mniej energii niż lampka nocna LED. Artykuł opisuje nowy rodzaj miękkiego materiału działającego jak sztuczne mięśnie, który sprawia, że roboty w skali owadów są prostsze, lżejsze i bardziej energooszczędne niż dotychczas.
Dlaczego małe, miękkie maszyny są ważne
Miniaturowe roboty inspirowane owadami mogłyby wślizgiwać się do zawalonych budynków w poszukiwaniu ocalałych, przeciskać przez rury, by kontrolować infrastrukturę, lub dyskretnie monitorować uprawy i lasy. Aby działać w tych ciasnych i nieprzewidywalnych przestrzeniach, muszą być niewielkie, elastyczne i wytrzymałe, przy bardzo niskim zużyciu energii. Wiele obecnych projektów opiera się na złożonych zespołach kół zębatych, zawiasów i wielu materiałów, co zwiększa masę, marnuje energię i utrudnia dalsze pomniejszanie. Autorzy argumentują, że idealnym rozwiązaniem jest pojedynczy materiał, który jednocześnie generuje ruch i przekazuje go bezpośrednio, podobnie jak prawdziwe mięśnie u zwierząt.
Inteligentny plastik zaprojektowany od wewnątrz
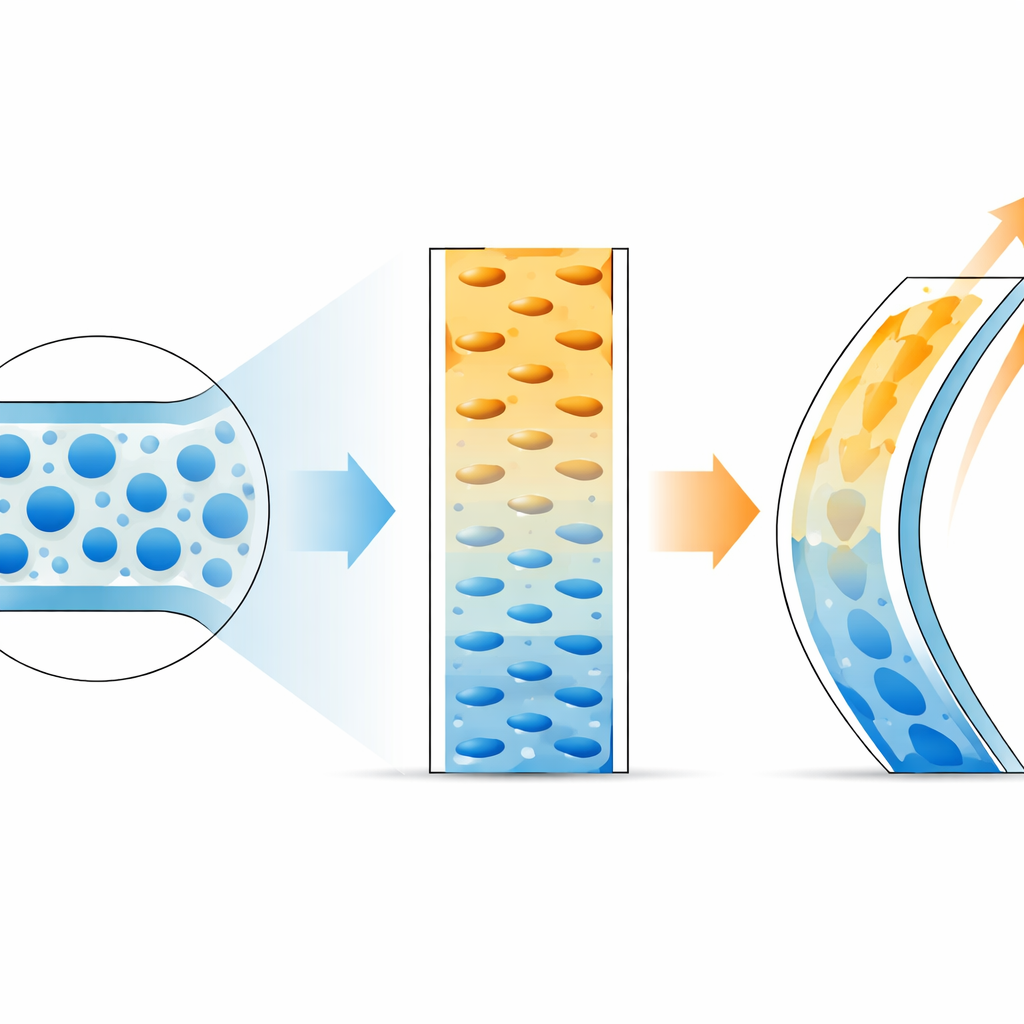
W centrum tej pracy znajduje się cienka folia tworzywa opartego na dobrze znanej rodzinie materiałów PVDF, cenionych za zdolność do odkształcania się pod wpływem pola elektrycznego. Badacze mieszają ten plastik z maleńkimi „kropkami polimerowymi” — nanometrycznymi cząstkami pokrytymi grupami chemicznymi zdolnymi do tworzenia wiązań wodorowych. Gdy mieszankę odlewa się w formie folii i delikatnie suszy przy kontrolowanym podgrzewaniu, rozpuszczalnik odparowuje szybciej z górnej warstwy niż z dolnej. To nierównomierne schnięcie, w połączeniu z wiązaniami wodorowymi, sprzyja ustawieniu łańcuchów polimerowych blisko dolnej powierzchni w silnie uporządkowaną, polarną strukturę, podczas gdy góra pozostaje mniej zorganizowana. W efekcie powstaje wbudowany gradient wewnętrzny przez grubość pojedynczej warstwy.
Od ukrytej struktury do silnego ruchu
Ten subtelny gradient strukturalny daje duże korzyści mechaniczne. Gdy przez folię przyłożone zostaje pole elektryczne, bardziej uporządkowany, silnie polarny dolny obszar reaguje silniej niż górny, więc jedna strona arkusza rozszerza się bardziej niż druga. Ta nierównowaga powoduje wygięcie całej listwy, podobnie jak klasyczny pasek bimetaliczny w termostacie, lecz tutaj dzieje się to w całkowicie organicznej, elastycznej folii o grubości zaledwie kilkudziesięciu mikrometrów. Dokładne pomiary pokazują, że folia może zmieniać długość nawet o około 14 procent i magazynować gęstości energii mechanicznej porównywalne z twardymi ceramicznymi siłownikami — a jednocześnie pozostaje miękka i lekka. W porównaniu z identyczną folią pozbawioną kropek polimerowych lub przetwarzania gradientowego, nowy materiał generuje wielokrotnie większe odkształcenia i znacznie efektywniej przetwarza energię elektryczną na ruch.
Budowa pełzającej gąsienicy i latającego motyla
Aby pokazać praktyczne zastosowania materiału, zespół tnie folię w kształty przypominające owady i dodaje proste elektrody na bazie węgla oraz cienkie miedziane elementy wsporcze. Jeden projekt przypomina małą gąsienicę z szerszym środkiem i zwężanymi końcami; po przyłożeniu zmiennego pola elektrycznego listwa wygina się rytmicznie i pełza po ryflowanej trasie z prędkością kilku długości ciała na sekundę, zużywając zaledwie kilka miliwatów mocy. Drugi projekt naśladuje motyla, z aktywnym centralnym obszarem i elastycznymi skrzydłami. Napędzane podobnymi sygnałami elektrycznymi, skrzydła szybko trzepoczą i mogą unieść urządzenie na kilka milimetrów ponad platformę, nawet dźwigając ładunki do dwudziestu razy cięższe od własnej masy — wszystko przy łącznej masie siłownika wynoszącej około 50 miligramów.
Co to oznacza dla przyszłych maleńkich robotów
Badanie pokazuje, że poprzez staranne zaprojektowanie organizacji materiału plastowego od jednej strony do drugiej można stworzyć pojedynczą, ultracienką warstwę, która silnie się wygina pod wpływem pola elektrycznego i może napędzać złożone, przypominające życie ruchy. Chociaż obecne urządzenia wciąż wymagają stosunkowo wysokich napięć, ich wyjątkowo niskie zużycie energii i piórkowa konstrukcja czynią je obiecującymi elementami przyszłych robotów w skali owadów i inteligentnych urządzeń. Przy dalszych udoskonaleniach obniżających napięcie pracy podobne folie mogłyby pewnego dnia umożliwić floty maleńkich, autonomicznych maszyn, które pełzają, trzepoczą i eksplorują świat, używając sztucznych mięśni o grubości zaledwie włosa.
Cytowanie: Chi, H., Bai, P., Zhou, Z. et al. Biomimetic actuator crafted from a relaxor ferroelectric polymer nanocomposite. Nat Commun 17, 2155 (2026). https://doi.org/10.1038/s41467-026-70165-0
Słowa kluczowe: miękka robotyka, sztuczne mięśnie, polimerowe siłowniki, roboty w skali owadów, materiały elektroaktywne