Clear Sky Science · pl
Odczytywanie ruchów fantomowej kończyny z nagrań wewnątrznaczyniowych
Nowe sposoby poruszania się bez nogi
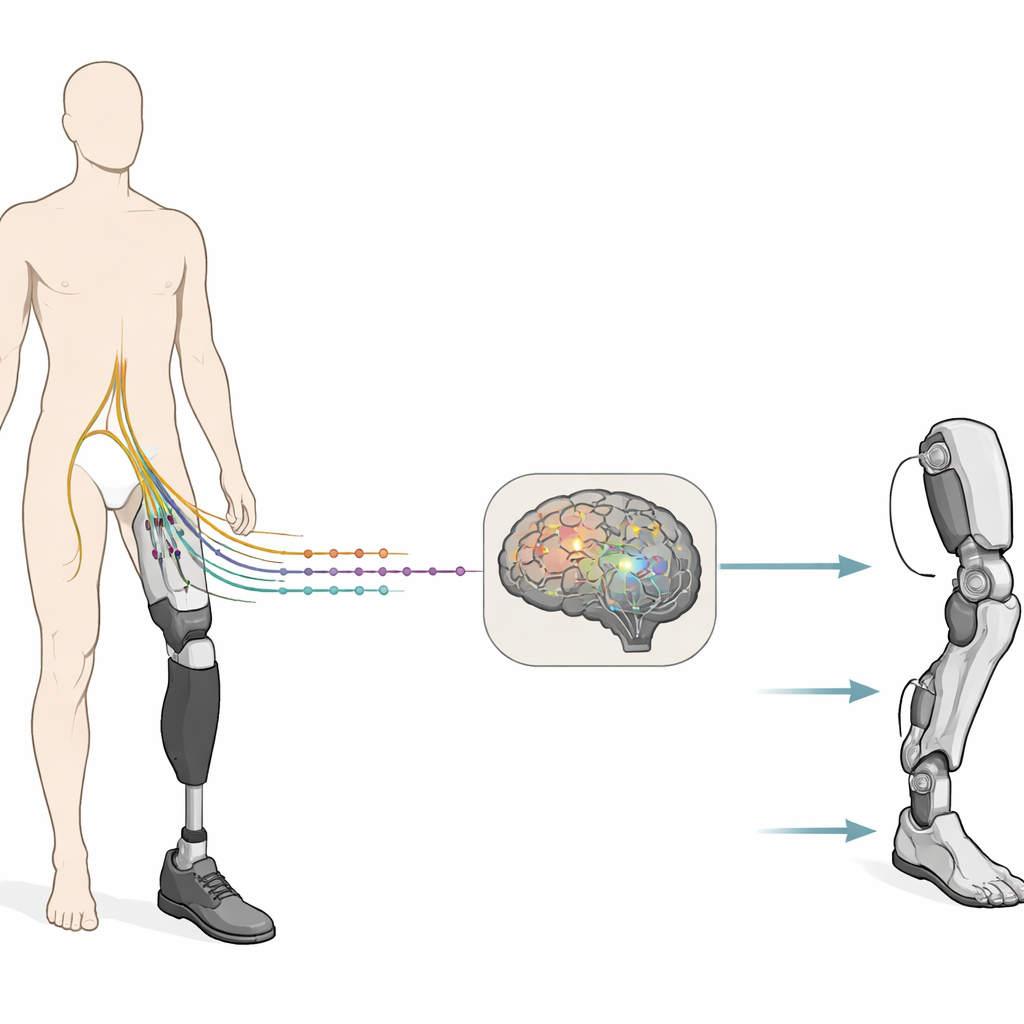
Dla osób, które utraciły nogę powyżej kolana, chodzenie na protezie często przypomina kierowanie sztywną maszyną, a nie poruszanie własną częścią ciała. Badanie to bada inną drogę: nasłuchiwanie bezpośrednio pozostałych nerwów nogi, gdy amputowani próbują poruszyć swoją „fantomową” kończynę, i wykorzystanie tych sygnałów do sterowania przyszłą bioniczną nogą. Sięgając do tych samych połączeń, którymi mózg kiedyś poruszał kolanem, skokiem i palcami, badacze pokazują, że naturalna, intuicyjna kontrola sztucznej nogi może być w zasięgu ręki.
Nasłuchiwanie nerwów wewnątrz uda
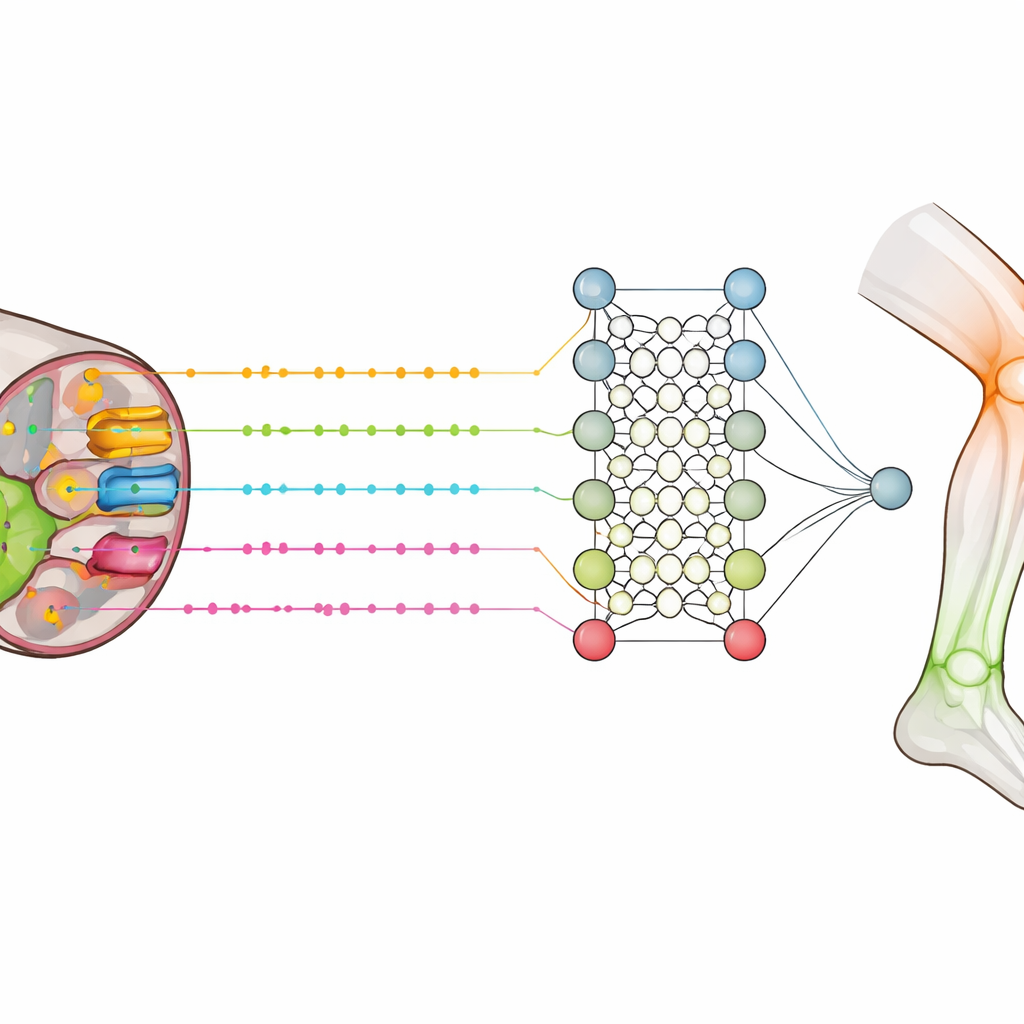
Zespół pracował z dwiema ochotniczkami/ochotnikami, którzy stracili nogę powyżej kolana, ale nadal wyraźnie czuli i „poruszali” swoją fantomową kończyną. Chirurdzy wszczepili cztery włosowato cienkie paski elektrod wewnątrz gałęzi nerwu kulszowego w tylnej części uda. Każdy pasek miał wiele maleńkich miejsc nagrywających, co dało łącznie 56 kanałów. Gdy uczestnicy siedzieli i na polecenie napinali lub prostowali fantomowe kolano, skok czy palce, elektrody rejestrowały wybuchy aktywności elektrycznej włókien nerwowych, które kiedyś kontrolowały mięśnie teraz nieobecne po amputacji.
Ruchy widmowe pozostawiają rzeczywiste ślady elektryczne
Mimo że dolna część nogi była nieobecna, próby jej poruszania generowały jasne i uporządkowane sygnały w nerwie. Większość miejsc nagrywających reagowała na przynajmniej jeden rodzaj ruchu, a wiele rozróżniało zgięcie i wyprost. Niektóre elektrody były bardziej nastawione na ruchy kolana, inne na skok czy palce, odzwierciedlając sposób, w jaki różne grupy mięśni są połączone z nerwem. Siła i czasowanie wzorców wyładowań nerwowych różniły się między stawami, co sugeruje, że pierwotna „mapa” kontroli nogi przetrwała w pozostawionym kikucie nerwowym. Badacze stwierdzili też, że te wzorce motoryczne dobrze pokrywały się ze znaną anatomią: kanały nerwowe aktywujące się przy danym ruchu zwykle odpowiadały mięśniom, które normalnie go wykonywały.
Nauka dekodera inspirowanego mózgiem
Uchwycenie aktywności nerwowej to tylko połowa sukcesu; przyszła proteza musi szybko przekształcać te złożone sygnały w polecenia. Naukowcy sięgnęli po sieć spikingową (spiking neural network), rodzaj sztucznej sieci komunikującej się krótkimi impulsami elektrycznymi, podobnie jak prawdziwe neurony. Najpierw przekształcili surowe nagrania nerwowe w gęste szeregi impulsów, które podkreślały zmiany mocy sygnału w czasie. Te szeregi impulsów podawano do kompaktowego dekodera, który uczył się klasyfikować je na „klasy” ruchu, takie jak zgięcie skoku czy wyprost kolana. W porównaniu ze standardowymi narzędziami uczenia maszynowego, dekoder spikingowy był zarówno dokładniejszy, jak i bardziej efektywny, niezawodnie rozpoznając wiele zamierzonych ruchów z krótkich fragmentów aktywności nerwowej.
Łączenie sygnałów nerwowych i mięśniowych
Ponieważ elektrody umieszczono między mięśniami uda, rejestrowały one także niewielkie sygnały mięśniowe w niższym paśmie częstotliwości. Poprzez filtrowanie nagrań zespół mógł oddzielić aktywność przypominającą mięśnie od szybszych impulsów nerwowych. Trenowanie dekodera wyłącznie na sygnałach mięśniowych poprawiło wyniki w porównaniu z użyciem jedynie wysokoczęstotliwościowych danych nerwowych. Najlepsze rezultaty dawało jednak połączenie obu źródeł — nerwu i pozostałej aktywności mięśniowej — co zwiększało dokładność zwłaszcza dla działań kolana i skoku. Sugeruje to, że pojedyncza wszczepiona technologia mogłaby wykorzystać zarówno ruch ruchu nerwowego, jak i resztkową aktywność mięśniową, dostarczając bogatszy, bardziej stabilny sygnał sterujący dla nogi robotycznej.
Czucie podłoża podczas poruszania nogą
Te same elektrody wewnątrznaczyniowe, które nasłuchiwały wychodzących poleceń ruchowych, mogły także działać w odwrotnym kierunku: wysyłać niewielkie impulsy elektryczne z powrotem do nerwu i wywoływać odczucia. W wcześniejszych pracach z tymi ochotnikami stymulacja przez implanty wywoływała odczucia dotykowe na podeszwie stopy i palcach. W obecnym badaniu badacze zmapowali, gdzie nagrania związane z ruchem i odczucia dotykowe nakładają się. Stwierdzili, że włókna nerwowe odpowiadające za ruch i czucie są w dużej mierze rozdzielone na poziomie uda, co może pomóc projektantom przypisywać niektóre kontakty głównie do dekodowania ruchu, a inne głównie do informacji zwrotnej sensorycznej, zmniejszając wzajemne zakłócenia.
Co to oznacza dla przyszłych bioniczych nóg
Dla czytelnika nietechnicznego główny przekaz jest taki, że „przewody” do poruszania brakującej nogi wciąż są aktywne i odczytywalne, nawet lata po amputacji. Umieszczając cienkie elektrody wewnątrz pozostającego nerwu i stosując algorytmy inspirowane mózgiem do interpretacji sygnałów, można w czasie rzeczywistym określać, czy osoba po amputacji próbuje zginać kolano, prostować skok czy zwijać palce fantomowej kończyny. W połączeniu ze stymulacją elektryczną, która przywraca odczucie dotyku z brakującej stopy, podejście to mogłoby umożliwić protezom nóg poruszanie się i odczuwanie znacznie bardziej jak naturalna kończyna. Chociaż prace są wciąż na wczesnym, laboratoryjnym etapie i testowano je offline tylko na dwóch osobach, stanowią ważną podstawę dla przyszłych protez łączących się bezpośrednio z układem nerwowym, oferujących bardziej intuicyjną kontrolę, lepszą równowagę i silniejsze poczucie uosobienia.
Cytowanie: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Słowa kluczowe: kończyna fantomowa, neuroprotetyka, interfejs nerwu obwodowego, spiking neural networks, amputacja kończyny dolnej