Clear Sky Science · pl
Skakanie robotów wzmocnione przez pchnięcie wywołujące hipograwitację, osiągające precyzyjne, przewidywalne i wydłużone skoki
Roboty, które potrafią skakać jak na Księżycu
Wyobraź sobie robota ratowniczego, który potrafi przeskoczyć przez ściany, przeskoczyć przez strumień lub wskoczyć przez poruszające się okno, nie chybiwszy miejsca lądowania o więcej niż centymetr. W artykule opisano nowy typ maszyny skaczącej, która robi dokładnie to, co powyżej, tymczasowo tworząc sobie „niską grawitację”, podobnie jak na Księżycu czy Plutonie, przy zachowaniu precyzji i przewidywalności skoków.
Dlaczego dzisiejsze roboty mają problem ze skakaniem
Zwierzęta, takie jak pasikoniki czy żaby, potrafią wykonywać dalekie skoki, lądować na wąskich strefach i korygować lot w powietrzu, gdy coś się zmienia. Większość robotów tego nie potrafi. Tradycyjne roboty skaczące stoją przed kompromisem: mogą albo skakać bardzo daleko, używając silnych sprężyn lub napędów, albo lądować precyzyjnie i bezpiecznie, rzadko łącząc obie cechy. Konstrukcje ze sprężynowym „katapultowaniem” magazynują dużo energii, ale wolno się ładują i trudno nimi sterować w powietrzu. Napedzane bezpośrednio silnikami nogi są łatwiejsze w kontroli, lecz brakuje im impulsu mocy potrzebnego do bardzo wysokich skoków. Dodatkowe skrzydła czy śmigła mogą wydłużyć czas lotu, ale często sprawiają, że trajektoria staje się chaotyczna i nieprzewidywalna — problematyczne, jeśli trzeba trafić w mały cel lub ominąć poruszające się przeszkody.
Udawanie niskiej grawitacji za pomocą ciągu powietrznego
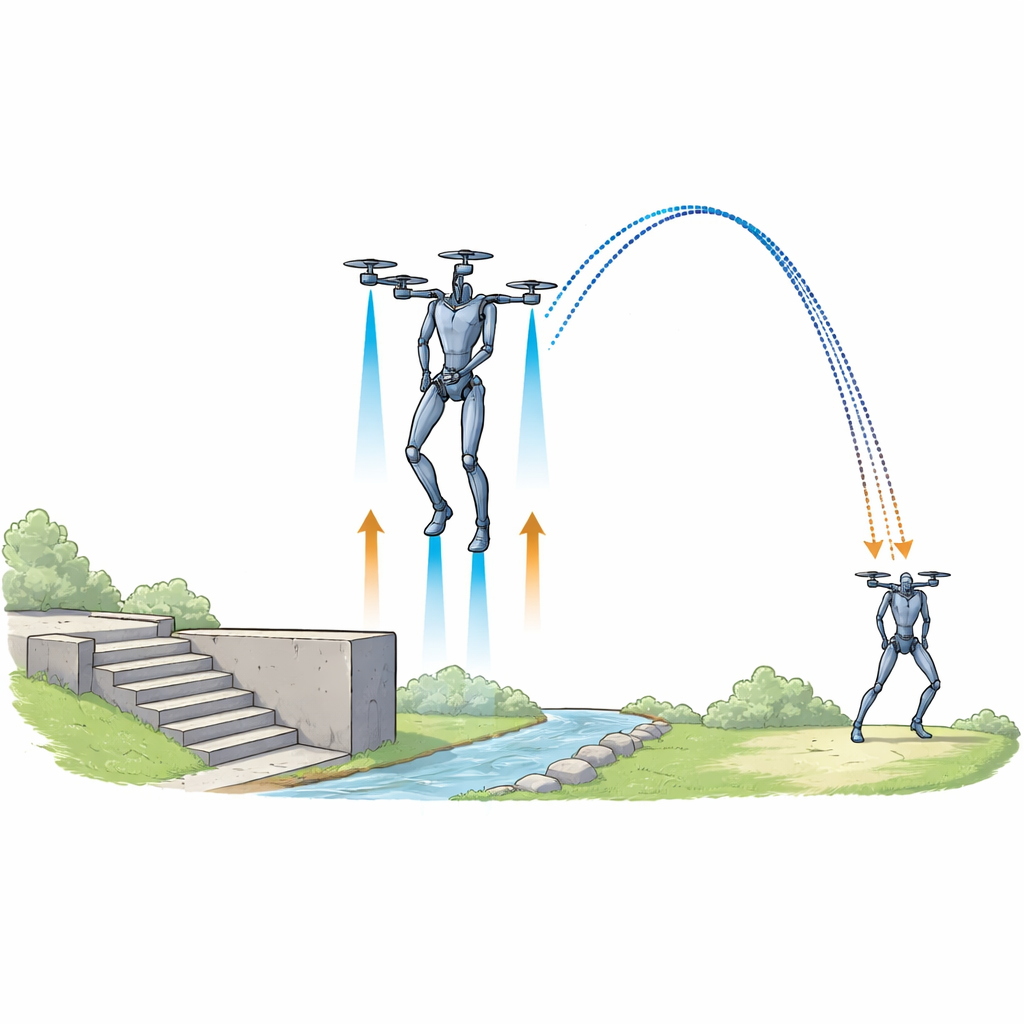
Naukowcy zbudowali bipedalnego robota o masie 370 gramów nazwanego GravOff, który omija ten kompromis, tworząc własne środowisko o obniżonej grawitacji. Robot ma parę długich, przypominających owad nogi napędzanych bezpośrednio silnikami oraz cztery małe śmigła zamontowane na szerokiej ramie. Podczas skoku nogi zapewniają szybkie odepchnięcie od ziemi, osiągając wysoką prędkość odrzutu. Jednocześnie śmigła pchają w górę na tyle, by częściowo skompensować grawitację Ziemi — stan, który autorzy nazywają hipograwitacją wywołaną ciągiem. Ponieważ „skuteczna grawitacja” jest niższa, ta sama moc nóg wysyła robota na znacznie wyższą i dłuższą trajektorię — do 6,9 metra wysokości, około 46 razy jego wysokości ciała — porównywalnie z najlepszymi rekordami skoków, przy łagodniejszych prędkościach odrywających i lądujących.
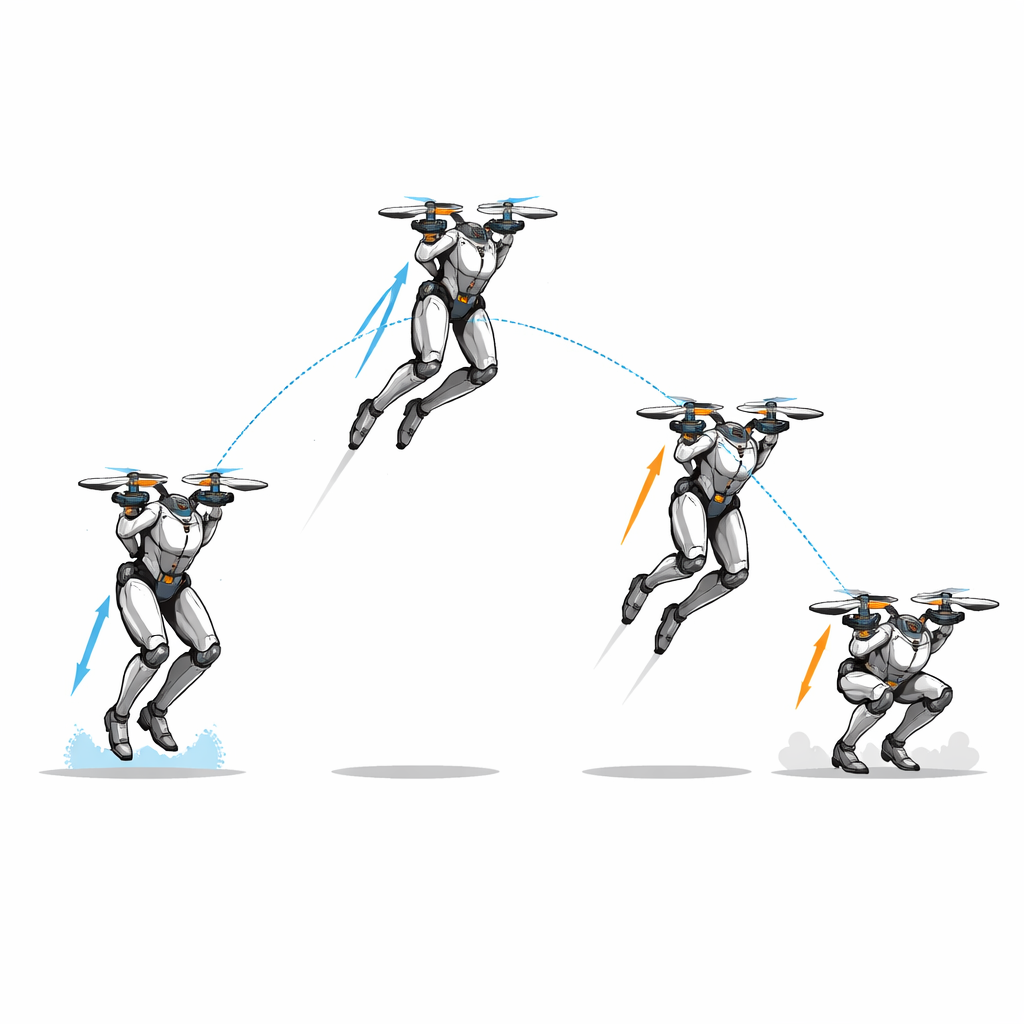
Rysowanie i sterowanie idealną parabolą
To, co wyróżnia GravOffa, to nie tylko zasięg skoku, ale też dokładność podążania za wybraną trajektorią. Zespół traktuje każdy skok jako zaznaczoną w czasie krzywą, gdzie pozycja i czas są zablokowane jak punkty na narysowanej paraboli. Korzystając z czujników i predykcyjnego algorytmu sterowania, robot porównuje swoje rzeczywiste ruchy w powietrzu z tą odniesieniową krzywą dziesiątki razy na sekundę i lekko przechyla wirniki, by skorygować tor lotu. Co kluczowe, śmigła mogą się obracać niezależnie od przechylenia ramy robota, więc robot może ukierunkować ciąg bez konieczności przechylania całej konstrukcji, zachowując osobno równowagę i sterowanie. Ta podwójna kontrola pozwala GravOffowi lądować w kwadracie o boku zaledwie 25 centymetrów z powtarzalnością na poziomie milimetrów, nawet gdy kąt odlotu różni się o aż 15 stopni lub gdy silny wiatr z wentylatora dmucha z prędkością 3,5 m/s podczas lotu.
Miękkie, stabilne lądowania bez odbicia
Wysokie skoki zwykle oznaczają twarde lądowania, które mogą uszkodzić sprzęt lub przewrócić robota. GravOff radzi sobie z tym na dwa sposoby lądowania. Przy szczególnie silnych uderzeniach amortyzuje energię miękki, trójwymiarowo drukowany tłumik w każdej nodze. Dla precyzyjnych lądowań na małych lub ruchomych celach robot aktywnie chowa nogi, a następnie ponownie je wysuwa w odpowiednim momencie, wydłużając czas kontaktu z podłożem. Ta „czynna amortyzacja” zmniejsza siły uderzenia czterokrotnie w porównaniu z pasywnym lądowaniem i niemal niweluje przychodzącą pędowość, dzięki czemu robot zatrzymuje się przy pierwszym dotknięciu zamiast odskakiwać.
Od laboratoryjnych skoków do misji w terenie
Ponad kontrolowanymi testami wewnątrz, autorzy pokazują, że GravOff potrafi łączyć skakanie z czołganiem i toczeniem się, by poradzić sobie z rzeczywistym terenem. Potrafi powoli czołgać się po trawie, piasku, bruku i żłobionej nawierzchni, by ustawić bezpieczną pozycję startową, a następnie wykorzystać skoki w hipograwitacji, by pokonać przeszkody takie jak wielostopniowe schody, 2,35-metrowy mur czy trzymetryczny strumień. Strategia niskograwitacyjnego skakania okazuje się także znacznie bardziej energooszczędna niż czysty lot przy pokonywaniu średniej wielkości przeszkód: w niektórych testach skoki zużywały mniej niż jedną dziesiątą całkowitej energii wymaganej do utrzymania się w zawisie lub lotu nad tym samym barierem.
Co to oznacza dla przyszłych robotów
Mówiąc prosto, praca ta pokazuje, że roboty mogą skakać dalej, dokładniej i bezpieczniej, udając słabszą grawitację i korygując trajektorię po oderwaniu. Projekt GravOffa sugeruje przyszłych odkrywców, którzy mogliby przeskakiwać gruzy podczas akcji ratunkowych albo przemierzać klify i kratery na innych planetach, przewidując dokładnie gdzie i kiedy wylądują. Te same pomysły — przeciwdziałanie grawitacji ciągiem i sterowanie parabolą w locie — można wprowadzić do wielu innych robotów skaczących, potencjalnie przemieniając skakanie w niezawodny tryb podróży zaplanowany z wyprzedzeniem, zamiast ryzykownej ostateczności.
Cytowanie: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Słowa kluczowe: roboty skaczące, hipograwitacja, wektoryzacja ciągu, locomocja na nogach, sterowanie trajektorią