Clear Sky Science · pl
Bioinspirowana architektura impulsowa umożliwia kodowanie dotyku przy ograniczonej energii
Dlaczego mądrzejszy dotyk jest ważny dla robotów
Nasze opuszki palców pozwalają nam wyczuć ziarnko piasku, ślizgający się kieliszek czy delikatne pchnięcie w ułamku sekundy, przy niezwykle niskim zużyciu energii. Gdy roboty wychodzą z fabryk i trafiają do domów, szpitali i zatłoczonych miejsc pracy, będą potrzebować podobnego zmysłu dotyku, by bezpiecznie współdziałać z ludźmi i delikatnymi przedmiotami. Badanie to przedstawia nową sztuczną skórę i inspirowany mózgiem system przetwarzania, który pozwala maszynom wykrywać miejsce kontaktu z wysoką precyzją przy bardzo niskim zużyciu energii — kluczowym wymogu dla przyszłych robotów mobilnych i współpracujących.
Elastyczna skóra, która czuje jak nasza
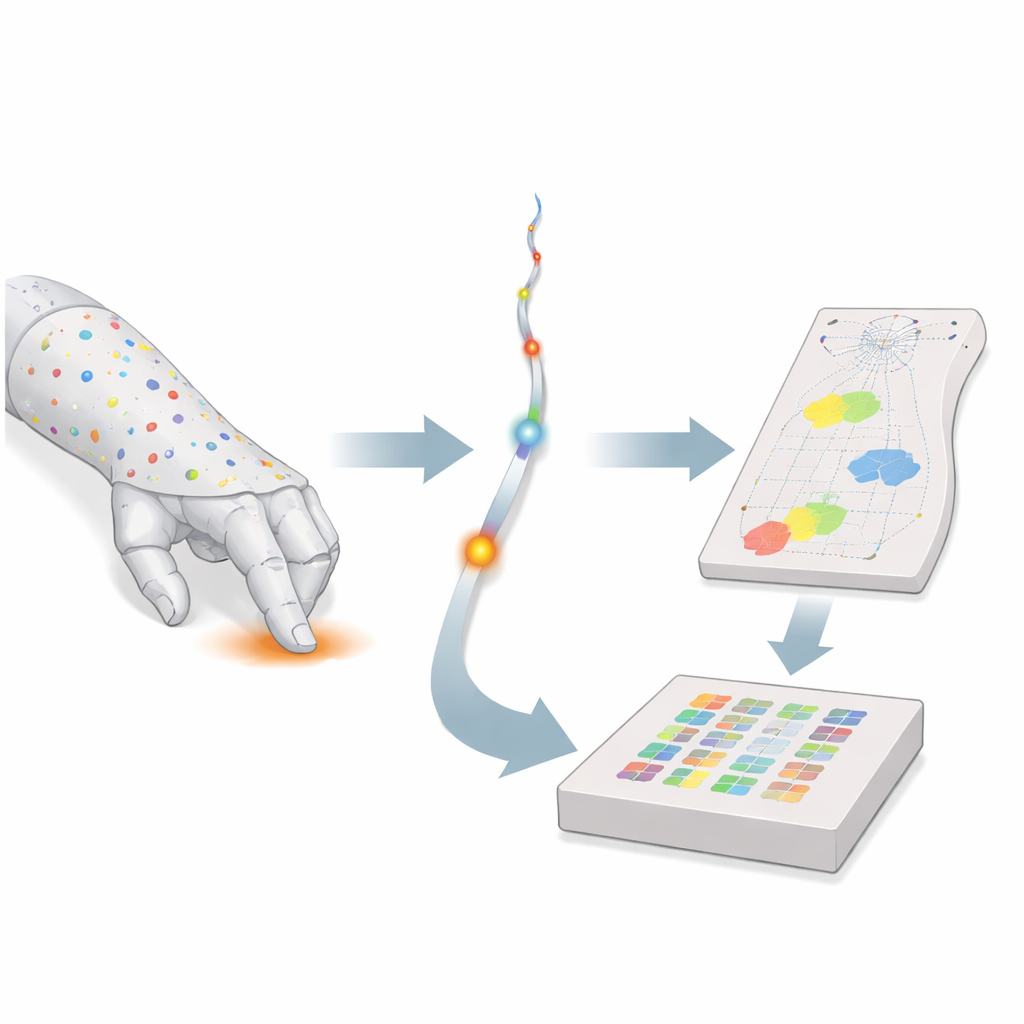
Naukowcy zbudowali miękką, sylikonową „e-skórę” o kształcie ludzkiego przedramienia i wplecili w nią 21 malutkich czujników optycznych wzdłuż jednej, cienkiej jak włos włókna. Te czujniki, zwane siatkami Bragga w włóknie (Fiber Bragg Gratings), reagują na rozciąganie i zginanie skóry przez przesunięcie koloru światła odbitego wewnątrz włókna. Ponieważ włókno przebiega pod powierzchnią, każdy czujnik jest czuły nie tylko na pojedynczy punkt, lecz na niewielki obszar — podobnie jak receptory dotyku rozmieszczone w naszej skórze. Niektóre z tych sztucznych receptorów silnie reagują na bardzo lokalny nacisk, inne odpowiadają szerzej na odkształcenia, odzwierciedlając sposób, w jaki różne zakończenia nerwowe w skórze rejestrują zarówno drobne szczegóły, jak i ogólny kształt.
Przekształcanie dotyku w impulsy elektryczne
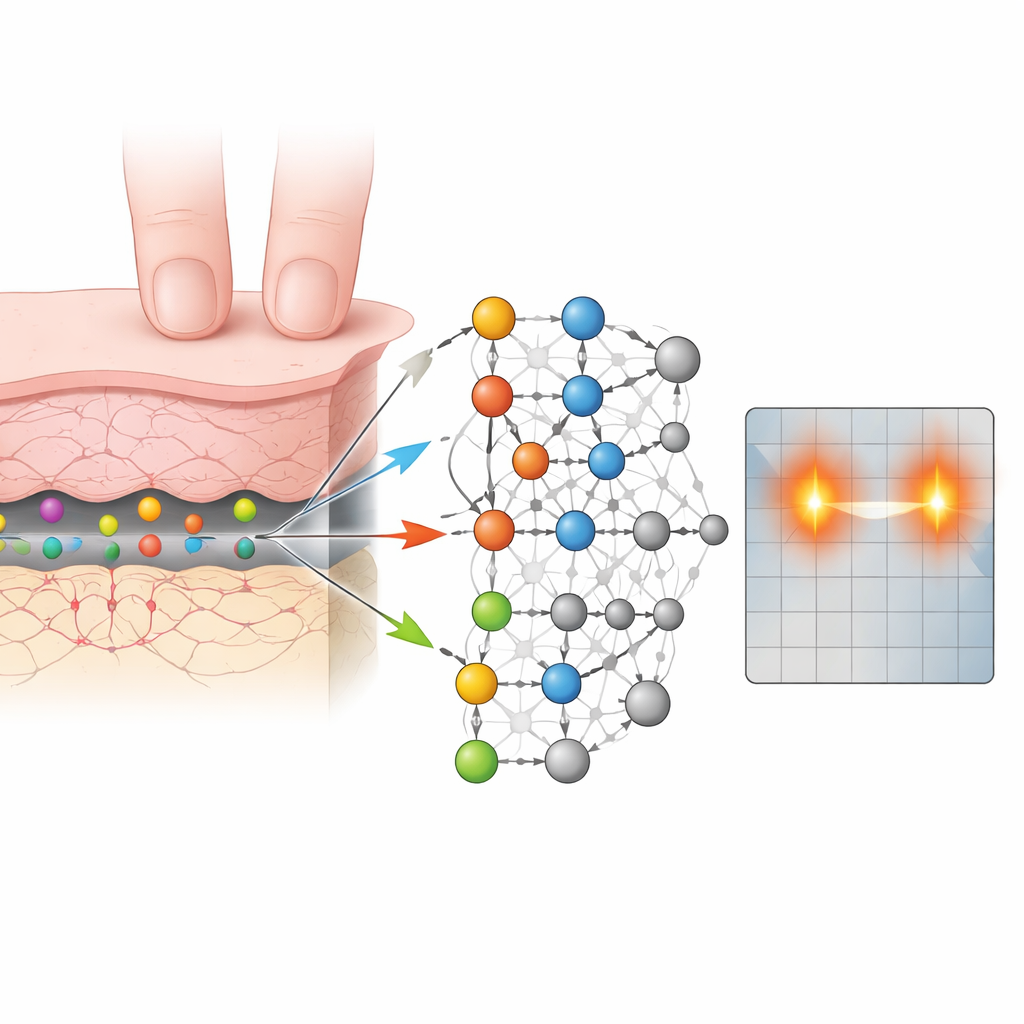
Aby zinterpretować ten bogaty strumień danych, zespół nie polegał na konwencjonalnych modelach głębokiego uczenia przetwarzających ramki liczb. Zamiast tego bliżej naśladowali biologię, używając impulsowej sieci neuronowej, gdzie informacja podróżuje jako krótkie impulsy elektryczne, czyli „szczyty”, podobne do impulsów nerwowych. Sygnały optyczne z e-skóry są konwertowane na strumienie impulsów i wysyłane do sieci. Każdy neuron wyjściowy w tej sieci reprezentuje konkretne miejsce na skórze, tworząc dwuwymiarową wewnętrzną mapę powierzchni. Gdy coś dotyka e-skóry, grupa neuronów wysyła impulsy w wzorze, który ujawnia miejsce kontaktu, a system oblicza pozycję dotyku ze środka tej aktywności.
Bardziej precyzyjny dotyk przy mniejszych zasobach
Dzięki takiemu rozwiązaniu system lokalizuje pojedyncze punkty dotyku na sztucznym przedramieniu z typowym błędem około trzech milimetrów, przewyższając solidny model oparty na głębokim uczeniu o około jedną trzecią i osiągając około dziesięciokrotnie lepszą rozdzielczość przestrzenną, niż wynikałoby to jedynie z odstępów między czujnikami. System działa także przy kilku punktach nacisku jednocześnie — do czterech kontaktów — oraz gdy naciski są przykłuwane ręcznie z różną siłą i kierunkiem. Badacze sprawdzili różne wzory połączeń wewnątrz sieci i stwierdzili, że układ inspirowany wczesnymi ścieżkami dotyku w rdzeniu kręgowym — gdzie komórki pobudzające łączą się z interneuronami hamującymi tłumiącymi sąsiednie wyjścia — jest kluczowy dla wyostrzenia szczegółów przestrzennych. Ta „hamująca lateralnie” mechanika pomaga utrzymać reprezentację ostrą, zapobiegając rozmyciu, gdy kontakty są blisko siebie.
Zaprojektowane pod kątem niskiego zużycia energii, nie tylko dokładności
Centralnym celem pracy było utrzymanie zużycia energii pod kontrolą, co staje się krytyczne, jeśli całe ciało robota ma być pokryte czujnikami. Zespół trenował sieć pod rosnącą presją, by generować mniej impulsów, naśladując ewolucyjną konieczność wymiany surowej wydajności na koszt metaboliczny. W warunkach bez ograniczeń bardziej elastyczna, mniej biologicznie realistyczna architektura radziła sobie nieco lepiej. Jednak gdy aktywność impulsowa została zredukowana do poziomów energooszczędnych, układ inspirowany biologią okazał się lepszy, dostarczając wyższą dokładność przy tym samym budżecie aktywności. Naukowcy przenieśli potem tę sieć na mieszany, sygnałowo-analogowy układ neuromorficzny, który implementuje neurony i synapsy bezpośrednio w elektronice analogowej. Na tym sprzęcie system dotykowy pracował przy mocy poniżej miliwata podczas dotyku i tylko kilku mikrowatach w stanie spoczynku, przy minimalnej utracie precyzji.
Od laboratoryjnych przedramion do przyszłych ciał robotów
Podsumowując, praca ta pokazuje, że staranne połączenie miękkiego, rozproszonego zmysłu z impulsowym przetwarzaniem na wzór mózgu może dać maszynom precyzyjne i szybkie czucie dotyku bez dużych kosztów energetycznych. Dopasowując nie tylko wydajność, ale także zasady okablowania wczesnych szlaków dotyku w układzie nerwowym, system sugeruje, dlaczego ewolucja mogła faworyzować pewne motywy obwodów: dostarczają one wystarczająco dobrą dokładność przy rygorystycznych ograniczeniach energetycznych. Przy skaliowaniu podobne e-skóry i procesory neuromorficzne mogłyby pozwolić robotom i protezom odczuwać kontakt na całej powierzchni, reagować szybko na nieoczekiwane uderzenia i współdziałać bezpieczniej oraz bardziej naturalnie w złożonych, dynamicznych środowiskach, w których żyją i pracują ludzie.
Cytowanie: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Słowa kluczowe: sztuczna skóra, czucie dotykowe, impulsowe sieci neuronowe, sprzęt neuromorficzny, bezpieczeństwo robotyki