Clear Sky Science · pl
Elektrody na bazie hydrożelu do wysokiej jakości akwizycji sEMG i sterowania robotyczną dłonią
Słuchając mięśni, by poruszać maszynami
Wyobraź sobie sterowanie robotyczną dłonią jedynie przez napięcie własnych mięśni. Dla osób, które straciły funkcję ręki, lub dla pracowników potrzebujących precyzyjnego wsparcia robotycznego, takie bezwysiłkowe połączenie ciała z maszyną mogłoby zmienić życie. Jednak dzisiejsze przylepne metalowe elektrody są sztywne, mogą podrażniać skórę i często dają zaszumione pomiary elektryczne. W artykule opisano miękką, przyjazną dla skóry „żelową” elektrodę, która dopasowuje się do ciała, wyłapuje drobne sygnały mięśniowe z większą precyzją i wykorzystuje je do sterowania realistyczną robotyczną dłonią.
Miękka łatka, która przypomina skórę
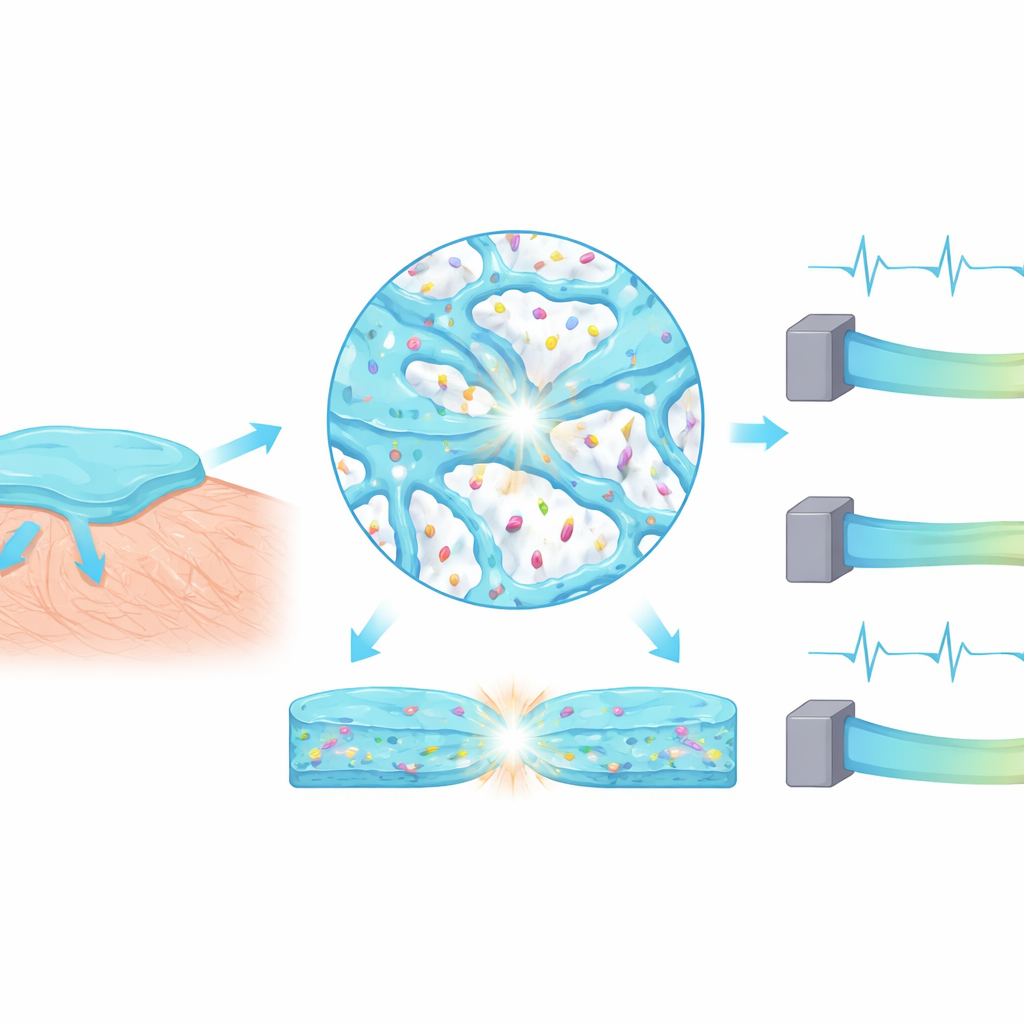
Naukowcy zaprojektowali nowy hydrożel — elastyczny, bogaty w wodę materiał podobny do soczewek kontaktowych — by pełnił rolę elektrody na skórze. Połączyli powszechnie stosowane składniki z tworzyw sztucznych z naturalnymi dodatkami, takimi jak chitozan (pochodzący z muszli skorupiaków) i kwas taninowy (występujący w roślinach), a także glicerynę i proste sole. Te składniki razem tworzą rozciągliwą, przewodzącą jony sieć, która może przenosić ładunki elektryczne, pozostając jednocześnie miękka i wilgotna w kontakcie ze skórą. Poprzez dopracowanie proporcji poszczególnych komponentów zespół uzyskał wersję, która może rozciągnąć się ponad dwanaście razy swojej pierwotnej długości bez pęknięcia i wciąż zachować wiarygodne właściwości elektryczne.
Mocny, lepki i potrafiący się samodzielnie naprawiać
Aby dobrze działać na poruszającym się ramieniu czy ręce, elektroda musi pozostać na miejscu, przetrwać zginanie i naciąganie oraz dalej funkcjonować po drobnych uszkodzeniach. Nowy hydrożel wyróżnia się we wszystkich tych obszarach. Pod mikroskopem ukazuje gęstą, gąbczastą strukturę utworzoną przez wiele słabych wiązań między jego cząsteczkami. Te wiązania działają jak amortyzatory, pozwalając materiałowi rozciągać się, skręcać i ściskać, po czym wracać do pierwotnego kształtu. Umożliwiają też, by pocięte kawałki żelu z czasem się ze sobą połączyły; gdy zespół przeciął próbkę na pół i dociśnął części razem, materiał stopniowo się zregenerował i odzyskał niemal całą oryginalną przewodność elektryczną. Tymczasem grupy chemiczne w kwasie taninowym nadają żelowi silną przyczepność do wielu powierzchni — od tworzyw i metali po prawdziwą skórę świni i ludzką skórę — a ta lepkość pozostaje użyteczna nawet po kilkudziesięciu cyklach przyklejania i odrywania.
Czystsze sygnały z pracujących mięśni
Następnym krokiem było sprawdzenie, jak dobrze miękki żel wychwytuje sygnały powierzchniowej elektromiografii (sEMG) — słabe napięcia generowane przez mięśnie tuż pod skórą. Naukowcy zamocowali elektrody hydrożelowe na przedramionach ochotników i porównali je z komercyjnymi poduszeczkami srebrowo-srebrno-chlorkowymi o tym samym rozmiarze. Podczas prostych zadań, takich jak zaciskanie i rozluźnianie pięści, obie grupy elektrod rejestrowały czytelne przebiegi, ale hydrożel zapewniał zauważalnie wyższy stosunek sygnału do szumu. W praktyce oznacza to, że pożądane sygnały mięśniowe bardziej wyraźnie odcinały się od tła elektrycznego, a odczyty pozostawały stabilniejsze podczas przesuwania elektrod i ich ponownego użycia. Nawet po wielokrotnym ponownym przyklejaniu lub celowym pocięciu i samonaprawie, plastry hydrożelowe dalej rejestrowały sygnały wysokiej jakości, przewyższając sztywne metalowe podkładki.
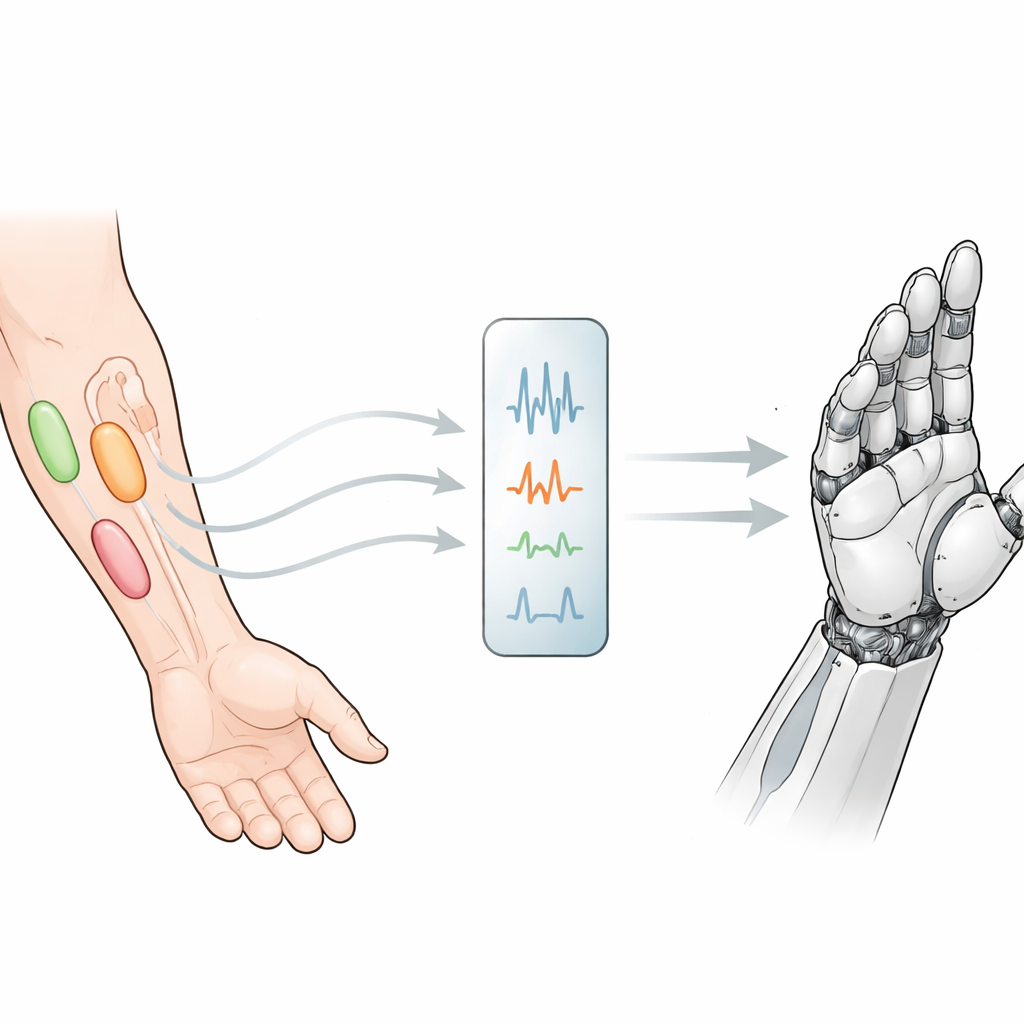
Nauka robotycznej ręki czytania gestów
Dysponując czystszymi sygnałami mięśniowymi, zespół zbudował kompletny system przekształcający te sygnały w rozpoznawalne gesty dłoni. Zamontowali zintegrowane elektrody hydrożelowe nad mięśniami zginaczami i prostownikami przedramienia i rejestrowali wzorce elektryczne, gdy ochotnicy wykonywali pięć powszechnych gestów, takich jak znak „OK”, kciuk w górę, otwarta dłoń, wskazywanie i zacisknięta pięść. Z tych nagrań badacze wydobyli proste cechy statystyczne — jak silne, jak stabilne i jak szybko zmieniają się sygnały — i wprowadzili je do modelu komputerowego. Użyli algorytmu łączącego szybko uczącą się sieć neuronową z metodą optymalizacji inspirowaną stadnym zachowaniem ptaków. To połączenie pozwoliło systemowi szybko nauczyć się, które wzorce mięśni odpowiadają poszczególnym gestom z wysoką dokładnością.
Od poleceń przypominających myśl do rzeczywistego ruchu
Na koniec zespół połączył oprogramowanie rozpoznające z biomimetyczną robotyczną dłonią. Gdy ochotnik przyjął jeden z wyuczonych gestów, elektrody hydrożelowe wychwyciły sygnały sEMG, algorytm zidentyfikował zamierzony gest, a robotyczna dłoń naśladowała ruch w czasie rzeczywistym. W licznych próbach system poprawnie klasyfikował gesty w ponad 94% przypadków, mimo że opierał się tylko na niewielkim zestawie prostych cech sygnału. Dla laika wniosek jest prosty: miękka, samonaprawiająca się i lepka łatka żelowa może wygodniej i czyściej słuchać aktywności mięśni przez skórę niż konwencjonalne metalowe podkładki, umożliwiając niezawodne sterowanie robotami wspomagającymi. Podejście to może stanowić podstawę przyszłych protez dłoni, narzędzi rehabilitacyjnych i urządzeń noszonych, które reagują naturalnie na własny „elektryczny język” ciała.
Cytowanie: Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
Słowa kluczowe: elektrody hydrożelowe, powierzchniowa elektromiografia, czujniki noszone, rozpoznawanie gestów, sterowanie robotyczną dłonią