Clear Sky Science · pl
Równoległonoga robot na skalę owada oparty na zintegrowanym mechanizmie origami łączącym napęd i strukturę
Małe roboty do ciasnych przestrzeni
Wyobraź sobie robota ratowniczego na tyle małego i lekkiego, że zmieści się przez pękniętą ścianę, przepełznie wzdłuż wącej rury, a nawet przepłynie przez kałużę. W artykule przedstawiono taką maszynę: wielkości dłoni, przypominającą owada, nazwaną PLioBot, wykonaną z jednej złożonej arkuszowej struktury, poruszającą się bardzo szybko jak na swój rozmiar i radzącą sobie z wieloma rodzajami trudnego terenu. Autorzy pokazują, jak sprytne składanie połączone z maleńkimi silnikami wibracyjnymi może zamienić płaskie materiały w zwinnych odkrywców do ciasnych, trudno dostępnych miejsc.
Z płaskiego arkusza do czworonożnego pełzaka
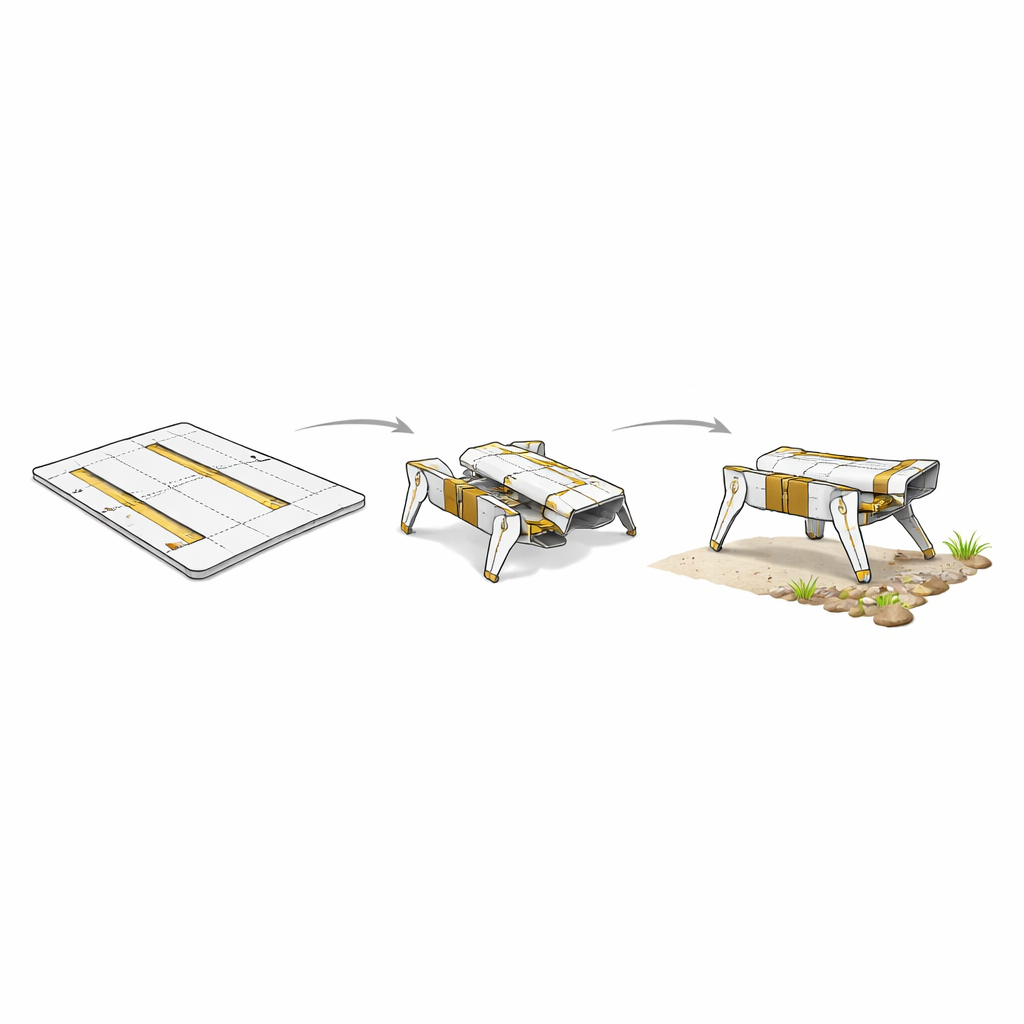
PLioBot powstaje jako płaski wzór, podobny do zabawki wycinanej i składanej z papieru. Zamiast papieru wzór stanowi pięciowarstwowa kanapka z włókna szklanego, włókna węglowego, elastycznej folii oraz pasków ceramiki piezoelektrycznej pełniących funkcję mięśni. Precyzyjnie umieszczone cienkie obszary w warstwie folii służą jako zawiasy. Po wycięciu laserowym cała struktura jest składana w zaplanowanej sekwencji tak, że tułów, cztery nogi i wszystkie osiem siłowników powstają z jednego ciągłego elementu. Bez śrub, bez oddzielnych silników i bez ręcznego wyrównywania — samo składanie daje kompletny robot o długości około 2,5 centymetra i masie zaledwie 1,2 grama.
Jak maleńkie nogi robią duże kroki
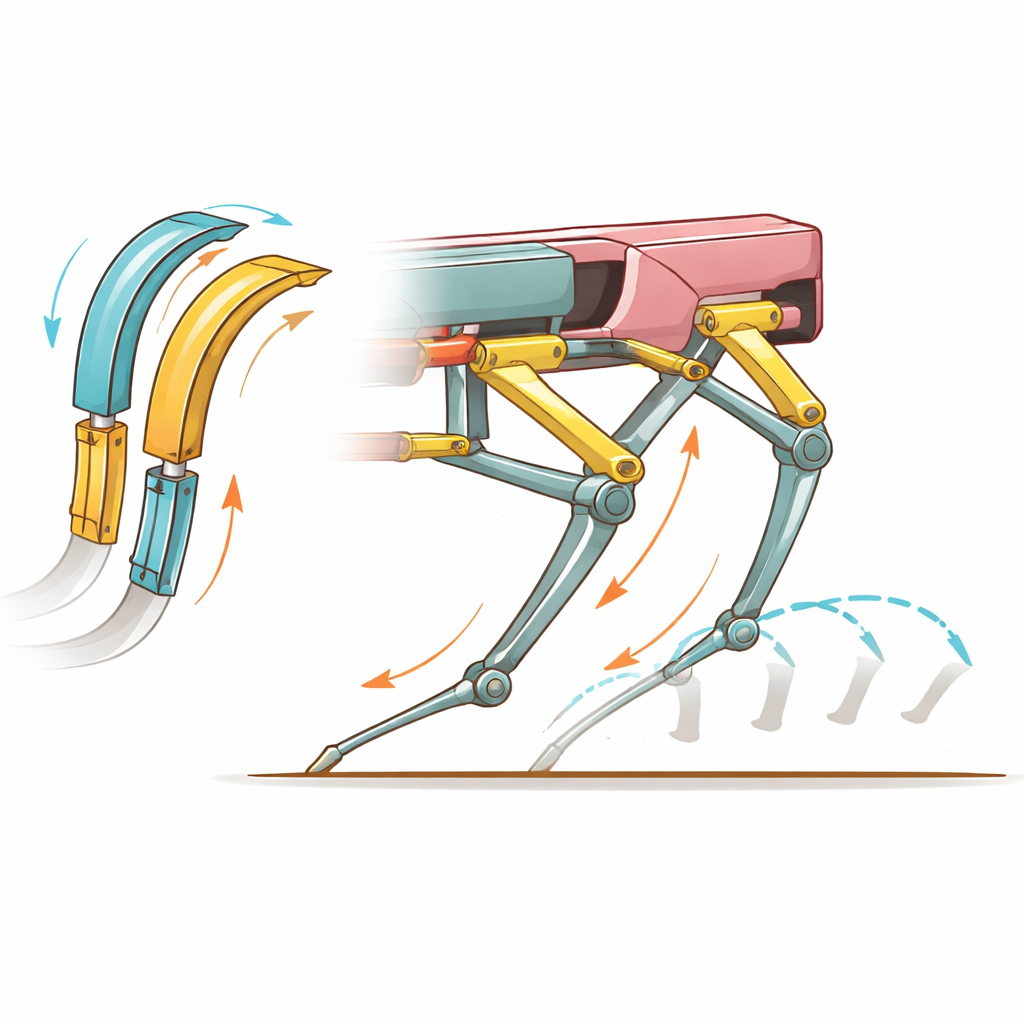
Ruch robota pochodzi z ceramiki piezoelektrycznej — materiału, który nieznacznie się odkształca pod wpływem przyłożonego napięcia elektrycznego. Każdy bok PLioBot wyposażony jest w parę „bliźniaczych” paskowych siłowników. Gdy przemienne napięcia powodują, że paski wyginają się tam i z powrotem, ich ruch jest przekazywany przez zestaw zawiasowych łączników tworzących miniaturowy równoległy mechanizm nogi. Poprzez staranne strojeniem sygnałów każda noga może poruszać się w górę i w dół oraz do przodu i do tyłu, kreśląc pętlową ścieżkę stopą. Koordynacja wszystkich czterech nóg w rytmie przypominającym kłus pozwala robotowi efektywnie odpychać się od podłoża i przemieszczać szybko do przodu. Przy optymalnych ustawieniach PLioBot osiąga 44,6 centymetra na sekundę — około 18 długości ciała na sekundę — co czyni go jednym z najszybszych robotów kroczących w tej skali.
Wbudowane mięśnie, mniej problemów montażowych
Większość robotów na skalę owadów jest żmudnie składana z wielu maleńkich części: oddzielnych silników lub aktuatorów, ram i łączników, które trzeba ręcznie wyrównywać. To zwiększa koszty, ogranicza precyzję i utrudnia produkcję masową. Autorzy rozwiązują ten problem, w pełni integrując strukturę i napęd w jednym „mechanizmie origami”. Wykorzystują udoskonalony proces laminacji, w którym wszystkie warstwy — sztywne okładziny z włókna szklanego, ortogonalne elektrody z włókna węglowego, elastyczna folia zawiasowa oraz paski ceramiczne — są wycinane, układane, wyrównywane przy użyciu otworów na kołki i prasowane na gorąco przed ostatecznym cięciem laserowym konturu. Efektem jest wytrzymała płaska blankieta, która już zawiera szkielet robota, stawy i mięśnie na swoich docelowych miejscach, gotowa do złożenia w kształt.
Chodzenie, wspinanie i pływanie w prawdziwym terenie
Aby sprawdzić, czy ich projekt sprawdza się poza stołem laboratoryjnym, zespół przetestował PLioBot na różnych codziennych przeszkodach. Na gładkim szkle istnieje ryzyko poślizgu, ale robot nadal porusza się szybko; na gąbce i akrylu zyskuje przyczepność kosztem nieco niższej prędkości. Wspina się po pochylniach do 12 stopni i może ciągnąć ładunki cięższe od siebie — do 1,7 grama, z bardzo dobrą wydajnością szczególnie poniżej około 0,8 grama. W wąskich tunelach o szerokości zaledwie 3 centymetrów i wysokości poniżej 3 centymetrów robot przenosi ładunek 1,4 grama, zachowując kilka długości ciała na sekundę. Po wymianie na półkuliste podkładki pod stopy lub płetwiaste wiosła PLioBot porusza się po żwirze i trawie, przemierza przesypujące się piaski bez zapadania się, chodzi po dnie zbiornika, a nawet pływa po powierzchni wody, wykorzystując wyłącznie płetwy jako napęd.
Co to oznacza dla przyszłych małych odkrywców
Mówiąc prosto, praca ta pokazuje, że można wydrukować i złożyć bardzo małego robota, którego ciało i mięśnie są zrobione z jednego elementu, i że taki robot może poruszać się szybko i radzić sobie z wieloma zabrudzonymi, rzeczywistymi powierzchniami. PLioBot wciąż polega na zewnętrznych przewodach zasilających, więc nie jest jeszcze w pełni autonomiczny. Jednak zintegrowany projekt origami i metoda wytwarzania wskazują kierunek na przyszłość, w którym duża liczba niedrogich robotów na skalę owadów mogłaby być produkowana jak płaskie części, składana w kształt i wyposażana w miniaturowe baterie oraz układy sterujące. Takie stada mogłyby kiedyś przeszukiwać uszkodzone budynki, kontrolować rurociągi przemysłowe lub badać inne planety — wszystko zaczynając od czegoś, co na pierwszy rzut oka wygląda jak sprytnie wycięty arkusz.
Cytowanie: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Słowa kluczowe: roboty na skalę owadów, robotyka origami, aktuatory piezoelektryczne, adaptacyjne poruszanie się po terenie, mikro-fabrykacja robotów