Clear Sky Science · pl
Siłowniki z pamięcią kształtu w formie drutu: modelowanie, projektowanie i sterowanie
Metalowe druty, które „pamiętają” swój kształt
Wyobraź sobie cienki metalowy drut, który może ciągnąć jak mięsień, dyskretnie zginać palec robota, przeformować skrzydło samolotu w locie albo delikatnie uciskać słabnące serce — wszystko to przez zwykłe ogrzewanie i chłodzenie. Ten artykuł przeglądowy opisuje właśnie takie druty wykonane ze stopów z pamięcią kształtu (SMA), wyjaśnia, jak działają, jak inżynierowie je projektują i sterują nimi oraz gdzie już znajdują zastosowanie w robotyce, lotnictwie, urządzeniach medycznych i technologii noszonej.
Jak „ożywają” inteligentne metalowe druty
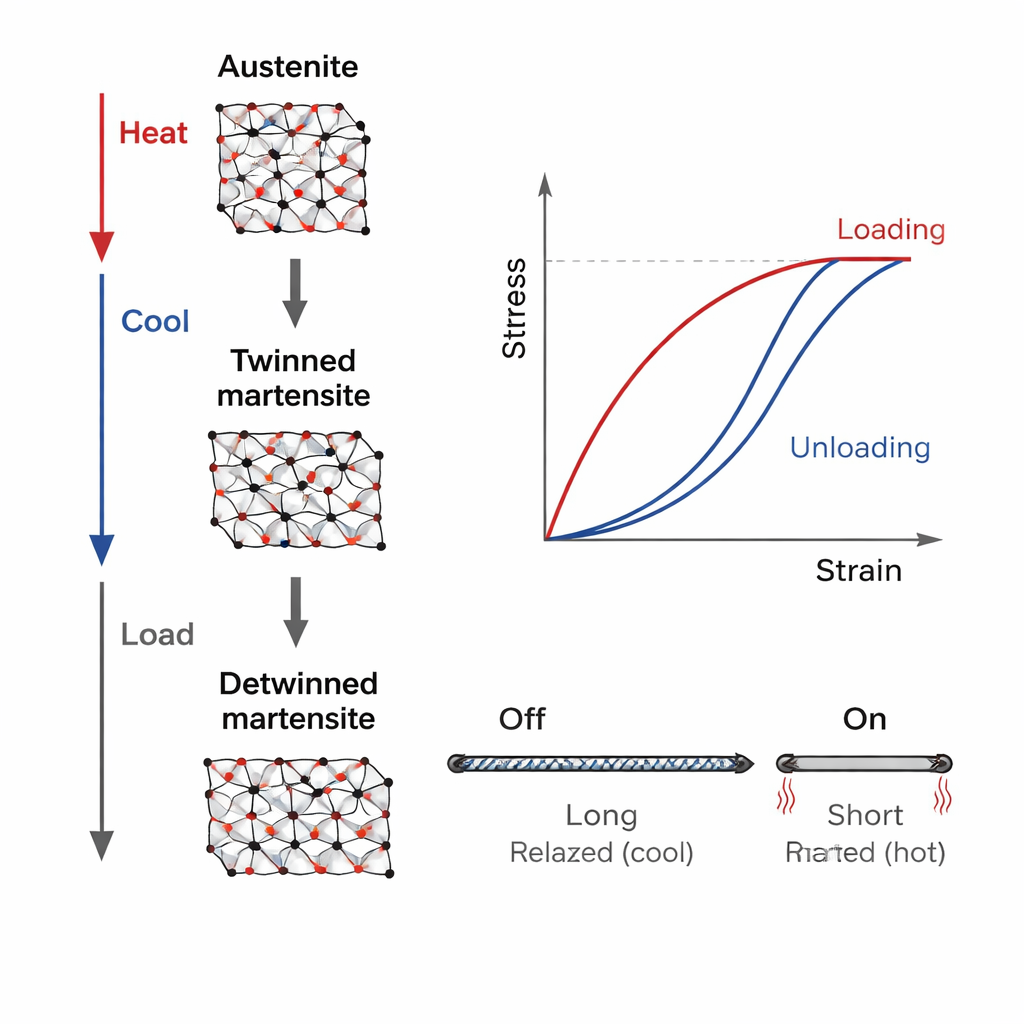
Stopy z pamięcią kształtu to specjalne metale, które można odkształcić, a następnie przywrócić do wcześniej zaprogramowanej formy w wyniku zmiany temperatury. W jednym trybie, zwanym efektem pamięci kształtu, drut można zgiąć, gdy jest chłodny i stosunkowo miękki; po ogrzaniu wraca do pierwotnego kształtu. W innym trybie — superelastyczności — stop może się rozciągać pod obciążeniem, a potem sprężyć, gdy obciążenie ustanie. Na poziomie struktury materiału zachowanie to wynika z przemian fazowych ciało–ciało między różnymi układami krystalicznymi, co sprawia, że jego odpowiedź jest silnie nieliniowa i nieco trudna do przewidzenia. Ponieważ druty SMA są cienkie, inżynierowie zwykle traktują je jako elementy jednowymiarowe, co upraszcza równania opisujące powiązania między temperaturą, naprężeniem, odkształceniem i przepływem prądu.
Od równań do modeli opartych na danych
Aby używać tych inteligentnych drutów w sposób niezawodny, projektanci potrzebują modeli przewidujących, jak silnie mogą ciągnąć, jak daleko się poruszają, jak się nagrzewają i jak zmienia się ich opór elektryczny. Klasyczne modele konstytutywne traktują drut jako materiał masowy i śledzą zmiany wewnętrznych faz w funkcji naprężenia i temperatury. Modele te są wydajne, ale opierają się na upraszczających założeniach. Równolegle badacze coraz częściej stosują uczenie maszynowe i sieci neuronowe do uczenia się zachowania drutu bezpośrednio z danych eksperymentalnych, co pozwala wychwycić subtelną histerezę i zależności od historii obciążeń. Inny istotny kierunek badań analizuje, jak podczas ogrzewania prądowego zmieniają się opór elektryczny i temperatura drutu, co umożliwia samopomiar — czyli estymację siły lub ruchu przez pomiar rezystancji zamiast dodawania oddzielnych czujników.
Budowanie ruchu: proste obciążenia, miękkie struktury i sztuczne mięśnie
Po stronie sprzętowej artykuł porządkuje siłowniki SMA w formie drutu według rodzaju obciążenia. W najprostszym układzie „obciążenia liniowego” drut napina się przeciwko sprężynie lub ciężarkowi, aby napędzać chwytaki lub mechanizmy wypuszczające w przestrzeni kosmicznej. Bardziej zaawansowane systemy o „obciążeniach nieliniowych” osadzają druty w giętkich belkach, miękkich polimerach, tkaninach lub strukturach przypominających origami, osiągając duże zgięcia, roboty pechające (crawling robots) i tkane egzoszkielety dla dłoni. Konfiguracje różnicowe wykorzystują dwa lub więcej przeciwstawnych drutów, naśladując pary mięśni, jak biceps i triceps, aby zapewnić szybki, odwracalny ruch w stawach takich jak sztuczne łokcie i kostki. Ponieważ drut SMA może skrócić się tylko o około 8%, kluczowym zagadnieniem projektowym jest zwiększanie skoku: nawijanie długich drutów na koła pasowe, prowadzenie ich po zakrzywionych ścieżkach, stosowanie modularnych etapów ślizgowych lub obrotowych albo użycie sprężyn z SMA, by uzyskać większe przemieszczenia w ograniczonej przestrzeni.
Nauczanie inteligentnych drutów posłuszeństwa
Sterowanie tymi siłownikami jest wyzwaniem, ponieważ ich odpowiedź zależy zarówno od temperatury, jak i od historii mechanicznej. Artykuł przegląda spektrum strategii sterowania — od klasycznych regulatorów PID po bardziej zaawansowane schematy. Podejścia oparte na modelu używają równań wynikających z fizyki lub modeli histerezowych do projektowania regulatorów typu sliding-mode i kompensatorów podających (feedforward), które przeciwdziałają nieliniowościom. Regulatory oparte na sieciach neuronowych i uczeniu ze wzmocnieniem idą dalej, ucząc się, jak napędzać drut dla dokładnego ruchu bez polegania na idealnych modelach. Równocześnie metody sterowania wykorzystujące samopomiar używają zmiennego oporu drutu jako wbudowanego sygnału sprzężenia zwrotnego, czasami w połączeniu z sieciami neuronowymi, aby estymować pozycję lub siłę bez masywnych zewnętrznych czujników.
Zastosowania w praktyce i kierunki na przyszłość
Siłowniki SMA w formie drutu już napędzają miękkie chwytaki robotyczne, maleńkie roboty pełzające, morfujące skrzydła lotnicze, urządzenia do wypuszczania satelitów, wszczepialne pompy i stenty, opaski wspomagające pracę serca, odzież uciskową, egzoszkielety i rękawice rehabilitacyjne. We wszystkich tych obszarach pozostają jednak wspólne przeszkody: powolne chłodzenie i nagromadzenie ciepła, zmęczenie materiału przy wielu cyklach, złożoność sterowania i koszty produkcji. Autorzy argumentują, że postęp będzie zależał od integracji trzech wątków: lepszych modeli wieloskalowych i wzbogaconych danymi, sprytniejszych rozwiązań strukturalnych łączących SMA z elastyczną elektroniką i materiałami wielofunkcyjnymi oraz inteligentnych strategii sterowania adaptujących się online. Wyobrażają sobie zunifikowane ramy „modelowanie–projektowanie–sterowanie”, wspierane przez cyfrowe bliźniaki i uczenie maszynowe, które będą współoptymalizować te aspekty razem. Dla laika przesłanie jest takie, że te kształtowo-zmieniające się druty dojrzewają z laboratoriów do praktycznych sztucznych mięśni, z potencjałem cichego przeprojektowywania maszyn, urządzeń medycznych i systemów noszonych w nadchodzących latach.
Cytowanie: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Słowa kluczowe: stop z pamięcią kształtu, miękka robotyka, inteligentne siłowniki, struktury morfingowe, urządzenia noszone