Clear Sky Science · nl
Brein-geïnspireerde probabilistische bezettingsrasterkaarten met vector-symbolische architecturen
Robots die de wereld als een lappendeken zien
Elke zelfrijdende auto, magazijnrobot of huishoudrobotstofzuiger heeft een snel mentaal beeld van zijn omgeving nodig: wat is solide, wat is leeg en wat is nog onbekend. Dit artikel presenteert een nieuwe manier voor robots om dat beeld op te bouwen — een bezettingsrasterkaart — die ideeën ontleent aan hoe hersenen mogelijk informatie representeren, met als doel kaarten nauwkeurig te houden terwijl ze veel sneller en efficiënter te berekenen zijn.
Ruwe sensorping omzetten in een wereldkaart
Robots gebruiken vaak laserscanners of andere afstandssensoren om de wereld te onderzoeken terwijl ze bewegen, waarbij ze puntenwolken verzamelen van waar objecten zich bevinden en waar ruimte vrij is. Een klassieke techniek, bezettingsrastermapping, verdeelt de omgeving in kleine cellen, vergelijkbaar met pixels op een scherm, en kent elke cel een kans toe om bezet te zijn. Traditionele methoden behandelen dit als een intensief statistisch probleem: ze volgen onzekerheid nauwgezet maar verbruiken veel tijd en geheugen. Nieuwere neurale-netwerkmethoden zijn sneller en kunnen lacunes invullen, maar werken als zwarte dozen, zijn moeilijker te vertrouwen in veiligheidskritische toepassingen en moeten meestal voor elke nieuwe omgeving opnieuw worden getraind.
Een brein-geïnspireerd tussenvorm
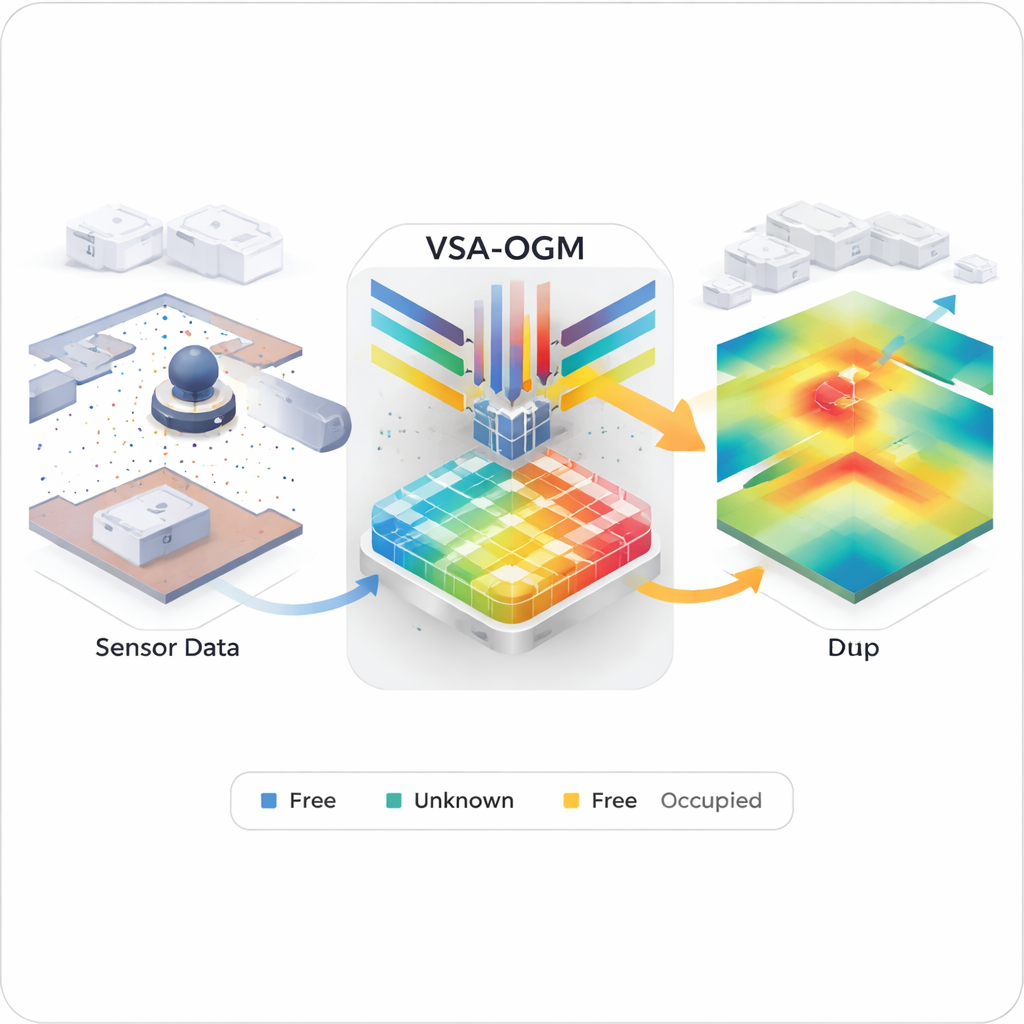
De auteurs stellen een "neuro-symbolische" compromis voor, VSA-OGM, een afkorting voor Vector Symbolic Architecture Occupancy Grid Mapping. In plaats van elk detail in een dicht raster op te slaan of structuur te verbergen in miljoenen gewichten van neurale netwerken, codeert de methode sensorlezingen als zeer lange vectoren in een hoge-dimensionale ruimte — een wiskundig idee geïnspireerd door theorieën over hoe groepen neuronen concepten en locaties zouden kunnen representeren. De omgeving wordt in tegels opgesplitst, en elke tegel heeft vectorgeheugens voor bewijs van "bezet" en "leeg". Terwijl de robot zich verplaatst en puntenwolken verzamelt, wordt elke waarneming omgezet in een van deze hyperdimensionale vectoren en gebundeld in het geschikte tegelgeheugen, waardoor informatie in de loop van de tijd efficiënt wordt geaccumuleerd.
Van lawaaierige vectoren naar duidelijke kaarten
Natuurlijk brengt het samenvoegen van veel signalen in één hoog-dimensionaal geheugen het risico mee op een luidruchtige, moeilijk leesbare klomp. VSA-OGM pakt dit aan met een zorgvuldig ontworpen decoderingstunnel. Eerst vergelijkt het de tegelgeheugens met vectoren die posities in de ruimte vertegenwoordigen, waardoor ruwe "quasi-kansen" voor bezetting ontstaan. Vervolgens past het een reeks niet-lineaire stappen en een informatie-theoretisch hulpmiddel, Shannon-entropie, toe om eruit te halen waar de data sterk één klasse ondersteunt boven de andere. Ten slotte gebruikt het een softmax-functie om deze signalen om te zetten in echte kansen en combineert ze tot een definitieve kaart die het tekenverschil tussen "bezet" en "leeg" weergeeft. Het resultaat is een vloeiend bezettingsraster dat interpoleert over spaarzaam gemeten gebieden terwijl het volledig probabilistisch en interpreteerbaar blijft.
Snelere kaarten voor één robot—of velen
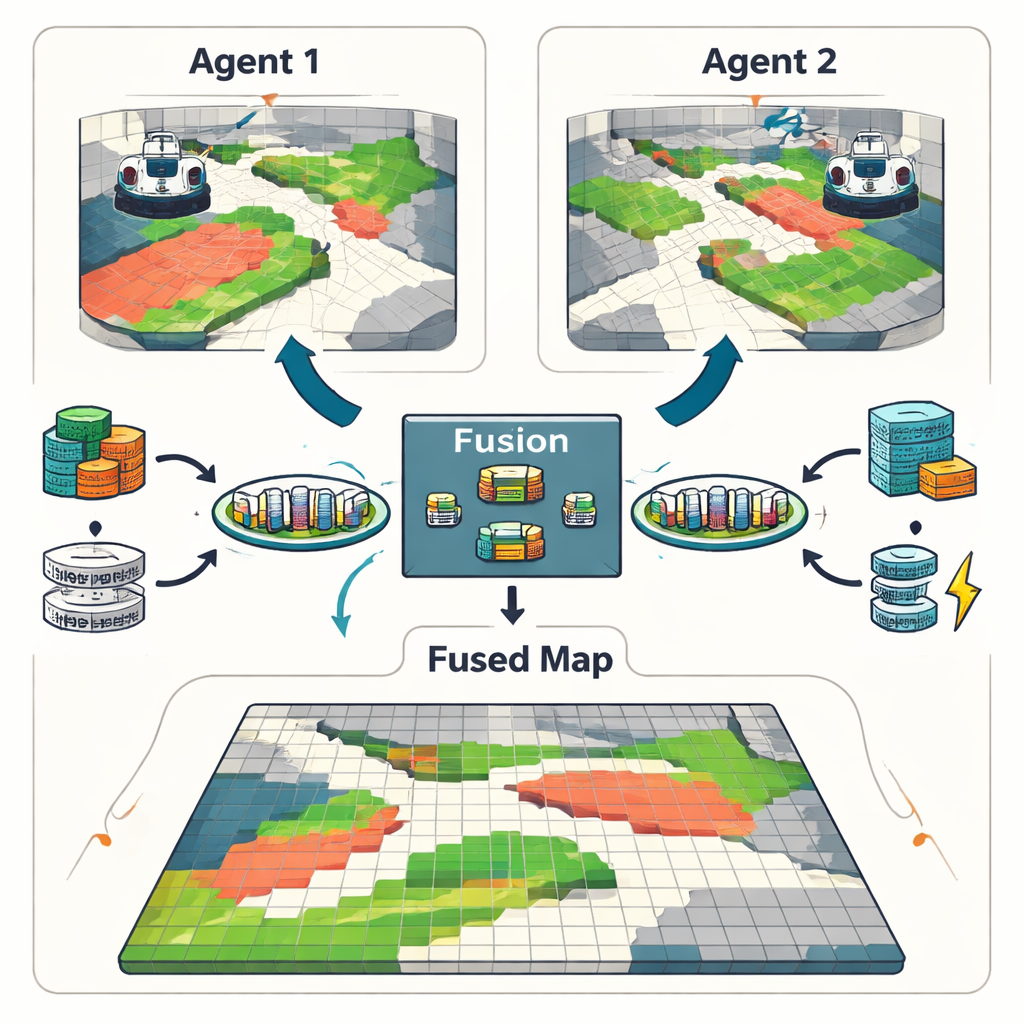
Om hun benadering te testen, voerden de onderzoekers VSA-OGM uit op meerdere gesimuleerde en echte datasets, waaronder een klassieke binnenruimtemap voor robots en een grootschalig rijschema. Tegen sterke traditionele referentiemethoden die ruimtelijke correlaties zorgvuldig modelleren, behaalde VSA-OGM vergelijkbare mappingnauwkeurigheid maar gebruikte ongeveer 400 keer minder geheugen en draaide tot 45 keer sneller. Vergeleken met gestroomlijnde traditionele methoden die wat statistische details laten vallen, evenaarde het nog steeds de nauwkeurigheid terwijl de latentie ongeveer een factor vijf werd verkort. Bij vergelijking met een neurale-netwerksysteem dat uren training en miljoenen parameters vereist, leverde VSA-OGM vergelijkbare mappingkwaliteit zonder voortraining en verminderde de verwerkingstijd per frame tot wel zes keer. Het raamwerk ondersteunt ook meerdere robots: vectorgeheugens van verschillende agenten kunnen eenvoudig bij elkaar worden opgeteld, wat gefuseerde kaarten oplevert met weinig informatieverlies.
Wat dit betekent voor alledaagse robots
Simpel gezegd laat dit werk zien dat robots niet hoeven te kiezen tussen traag-maar-vertrouwbaar wiskundig modelleren en snel-maar-ondoorzichtig neurale netwerken bij het bouwen van wereldkaarten. Door brein-geïnspireerde hoog-dimensionale vectoren te gebruiken, behoudt VSA-OGM de duidelijke probabilistische structuur van klassieke methoden terwijl het de snelheid en efficiëntie bereikt die nodig zijn voor realtime werking op beperkte hardware. Er blijven uitdagingen bestaan — zoals omgaan met extreem ongelijk verdeelde data en zeer dichte omgevingen — maar de benadering wijst richting toekomstige robots die hun omgeving veilig en betrouwbaar kunnen begrijpen, zelfs op bescheiden boordcomputers.
Bronvermelding: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
Trefwoorden: bezettingsrastermapping, autonome robots, vector-symbolische architecturen, probabilistische mapping, LiDAR-detectie