Clear Sky Science · nl
Gedragsbewijzen voor hiërarchische uitvoering van sequentiële bewegingen
Hoe onze hersenen simpele bewegingen omzetten in vloeiende handelingen
Alledaagse taken zoals typen op een toetsenbord, een pianospelletje uitvoeren of meerdere voorwerpen op een tafel grijpen lijken moeiteloos. Achter de schermen moet je brein echter vele kleine bewegingen aaneenschakelen tot vloeiende, gecoördineerde acties. Deze studie stelt een op het eerste gezicht eenvoudige vraag: plant het brein zulke actieketens altijd als één lange beweging, of bouwt het ze stap voor stap op met een verborgen hiërarchie van kleinere bouwstenen?
Reiken naar grote doelen op een tafel
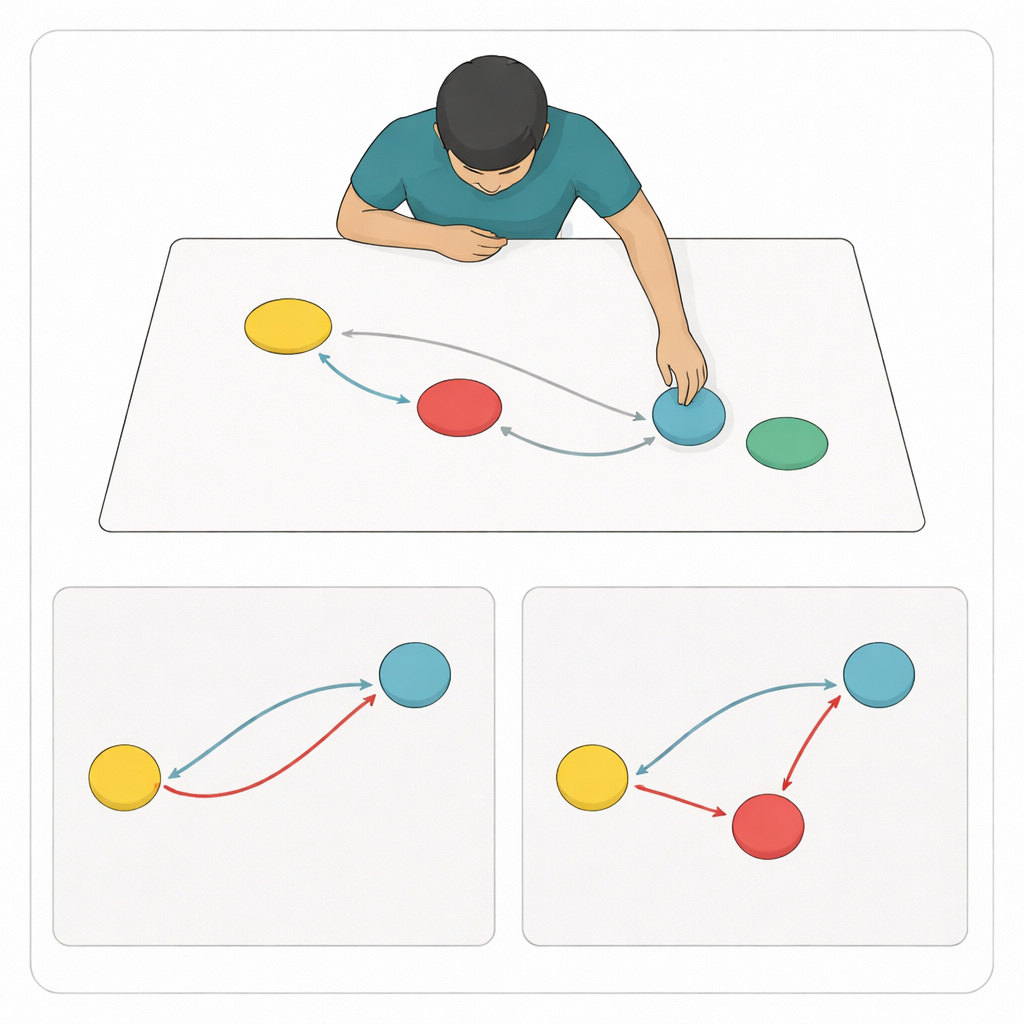
Om dit te onderzoeken ontwierpen de onderzoekers een tafelspelletje “verbind de stippen” voor de hand. Twintig proefpersonen zaten aan een tafel met meerdere grote gekleurde cirkels op het oppervlak. Een startcirkel lag dicht bij het lichaam, met andere cirkels links, rechts en boven geplaatst. In elke proef hoorde de deelnemer een geluid en moest hij of zij met de wijsvingertop van de startcirkel door een korte reeks doelen bewegen en weer terug, zo snel mogelijk maar zonder extreme precisie: het volstond dat de vingertop ergens binnen elke cirkel landde. Deze lage-precisie-opzet moedigde mensen aan snel en vloeiend te bewegen, waarbij paden tussen doelen buigen en in elkaar overlopen in plaats van scherp bij elk doel te stoppen.
Verborgen plannen aflezen uit de kromming van de hand
In plaats van te meten hoe lang mensen deden of hoe vaak ze fouten maakten, richtte het team zich op de exacte vorm van elk vingertopspoor. Ze keken naar twee belangrijke kenmerken. Ten eerste “tussenliggende buiging”: in hoeverre het pad naar een doel afweek richting het volgende doel voordat het dat eerste doel daadwerkelijk bereikte. Ten tweede “omkeren rond een doel”: hoe scherp of soepel het pad kromde wanneer het langs een doel passeerde en van richting veranderde. Samen onthullen deze patronen of een beweging naar één doel al rekening houdt met het volgende doel—een effect dat “coarticulatie” wordt genoemd, vergelijkbaar met hoe je mond toekomstige klanken vormt tijdens het spreken. De wetenschappers vergeleken deze gemeten krommen met de paden die werden geproduceerd door twee computermodellen van bewegingsplanning, beiden geworteld in gevestigde theorieën van optimale controle maar verschillend in interne structuur.
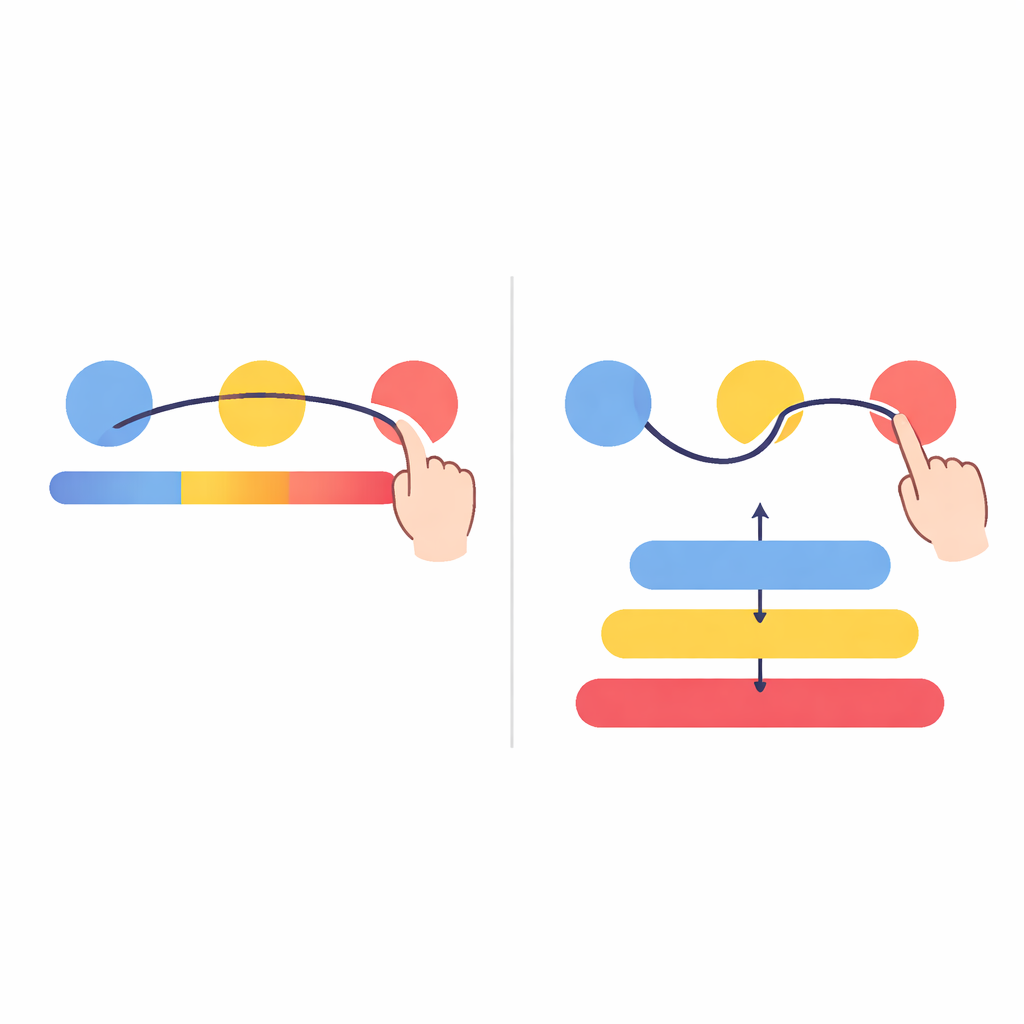
Platte plannen versus gelaagde plannen
In het “platte” model wordt verondersteld dat het brein de gehele drie-doelenreeks plant als één enkele, verenigde traject voordat de hand begint te bewegen. Dit lijkt op een volledig uit het hoofd geleerde beweging of “chunk” die in één keer wordt uitgevoerd. In dat geval zijn tussenliggende buiging en het omkeren rond doelen nauw met elkaar verbonden: zodra de planner bepaalt hoe sterk er op het eerste doel wordt gericht, legt dat grotendeels vast hoe de krommen er gedurende de hele reeks uitzien. Het “hiërarchische” model voegt daarentegen een eenvoudige tussentijdse laag toe die kleinere stukken aaneenrijgt—zoals een beweging naar twee doelen gevolgd door een enkele terugkeer—on the fly. Een apart dynamisch systeem beslist wanneer er wordt overgeschakeld van de ene subbeweging naar de volgende, waardoor de vorm rond elk doel onafhankelijker kan worden aangepast terwijl de algehele beweging soepel blijft.
Gedrag dat hiërarchisch lijkt
Toen de onderzoekers veel simulaties uitvoerden, ontdekten ze dat het platte model sommige combinaties van tussenliggende buiging en omkeren simpelweg niet kon genereren die menselijke deelnemers vanzelf produceerden. Met name toonden mensen vaak sterke buiging richting het tweede doel in het eerste deel van de beweging, en maakten ze toch een scherpe of anders gevormde bocht rond dat tweede doel—patronen die de platte planner niet kon nabootsen. Het hiërarchische model kon deze gemengde gedragingen daarentegen wel reconstrueren door dynamisch afzonderlijke “subbewegingen” te koppelen bij tussenliggende doelen. Door de echte data tegen beide modellen te vergelijken, concludeerden de auteurs dat bijna de helft van alle opgenomen bewegingsreeksen duidelijk een hiërarchische verklaring vereiste, terwijl andere reeksen compatibel waren met platte planning, wat suggereert dat mensen flexibel van strategie wisselen afhankelijk van de sequentie.
Wat dit betekent voor alledaagse vaardigheden
De bevindingen suggereren dat zelfs zonder langdurige oefening of sterk getrainde routines onze hersenen vaak vertrouwen op gelaagde plannen bij het aaneenrijgen van eenvoudige reiken. In plaats van een sequentie altijd samen te drukken tot één rigide chunk, lijkt het motorische systeem herbruikbare bewegingsdelen paraat te houden en deze in real time te koppelen. Bij training kunnen zulke ketens geleidelijk vervallen tot plattere, volledig “gechunkte” acties, wat helpt verklaren hoe vaardigheden zo snel en automatisch worden. Dit werk biedt een nieuw, geometrie-gebaseerd venster op hoe het brein beweging organiseert, en kan toekomstige research naar motorisch leren, revalidatie en het ontwerp van robots die met vergelijkbare adaptieve gratie bewegen, sturen.
Bronvermelding: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Trefwoorden: motorische controle, bewegingsplanning, chunking, hiërarchisch gedrag, sequentieel reiken