Clear Sky Science · nl
Breuk-gebaseerd grijpen: dynamische inslag maakt voorspelbare robotankering aan zoetwaterijs mogelijk
Klimmen waar de zwaartekracht bijna afwezig is
Stel je voor dat je een bevroren klif probeert te beklimmen waar de zwaartekracht zo zwak is dat je eigen gewicht je laarzen niet helpt om grip te krijgen. Dat is de uitdaging voor toekomstige robots die naar ijzige manen zoals Saturnus’ Enceladus worden gestuurd, waar wetenschappers hopen in diepe ijsventielen en grotten naar tekenen van leven te zoeken. Dit artikel beschrijft een nieuwe manier voor robots om zich aan ijs vast te klampen met snelle, hamerachtige slagen en een stevige knijpbeweging, geïnspireerd op de ijsbijlen van bergbeklimmers. Het resultaat is een lichtgewicht ankeringssysteem dat veel minder kracht en energie verbruikt dan de huidige ijsbouten of verwarmde pikken, wat mogelijk eerder ontoegankelijke ijzige werelden toegankelijker maakt.

Waarom het vasthouden aan ijs zo moeilijk is
Op aarde kan een klimmer zich met zijn volledige gewicht op een ijsbout of bijl leunen om in het oppervlak te bijten. Op Enceladus is de zwaartekracht slechts ongeveer één procent van die op aarde, dus een robot kan niet op zijn gewicht vertrouwen om gereedschap in het ijs te drukken. Bestaande opties hebben elk grote nadelen. Ijsbouten hebben grote duwkrachten nodig om te beginnen met bijten in het oppervlak—zo groot dat een robot op Enceladus mogelijk zo veel zou moeten wegen als een grote Marsrover om ze effectief te gebruiken. Verwarmde “thermische piks” kunnen zichzelf met weinig druk in positie smelten, maar verbruiken enorme hoeveelheden energie bij elk gebruik, een serieuze beperking voor ruimtevaartuigen die ver van de zon opereren. Tegelijkertijd vertrouwen veel moderne klimrobots op ruwe rotskenmerken, vacuümzuiging of speciale lijmen, die allemaal moeite hebben met de gladde maar golvende vormen van natuurlijk gletsjerijs.
Een trucje lenen van menselijke ijsklimmers
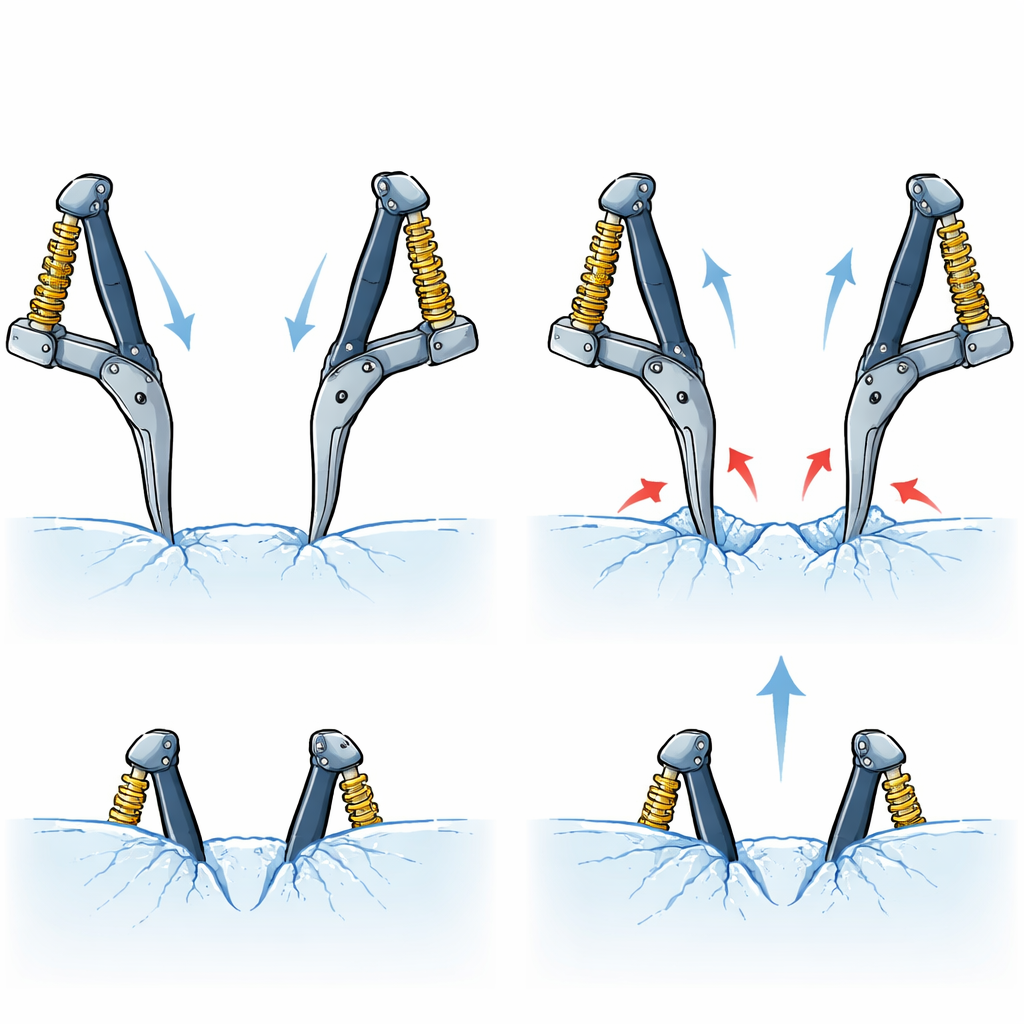
De auteurs stellen een andere aanpak voor: in plaats van je aan het ijsoppervlak aan te passen, creëer je je eigen grijppunten. Hun apparaat gebruikt twee kleine ijsbijlen gemonteerd op een compact grijpinstrument. Eerst worden veren in de armen gespannen, waardoor een bescheiden hoeveelheid mechanische energie wordt opgeslagen. Bij vrijgave zwaaien de bijlen als kleine hamers en slaan ze op het ijs, waarbij ze kleine kuiltjes uitkappen. Vervolgens knijpt hetzelfde mechanisme de bijlen naar elkaar zodat hun punten in de nieuwe inkepingen haken. Dit twee-stappenproces—inslag, daarna grijpen—verandert een glad stuk ijs in iets waar de robot zich aan kan vasthouden, en het is gemakkelijk omkeerbaar zodat de robot een volgende “stap” kan zetten. De hele cyclus wordt aangedreven door één motor die zowel de veren spant als de greep aandraait.
De fysica achter de greep testen
Om er zeker van te zijn dat deze aanpak betrouwbaar zou werken, bouwde het team wiskundige modellen van hoe diep de bijlpunt zou insnijden en hoeveel terugslag er na de inslag kon optreden. Daarna testten ze enkele bijlen die als slinger zwaaiden in blokken zoetwaterijs gekoeld tot typische gletsjertemperaturen. Door theorie en experiment te vergelijken, vonden ze dat hun modellen konden voorspellen hoe diep een kuil zou ontstaan en de “recoil”-energie schatten wanneer de bijl terugveert. Met deze resultaten berekenden ze hoe hard een robot de grijper tegen het ijs moest drukken voordat hij sloeg, zodat de bijlen in hun nieuwe kuilen blijven zitten in plaats van eruit te stuiteren. Voor hun gekozen verenenergie voorspelde het model dat ongeveer 16 newton duwkracht—ongeveer het gewicht van een paar liter water op aarde—bijna zeker succes zou geven.
Van labbank naar gletsjerwand
Met de modellen in handen testten de onderzoekers de volledige dubbelbijlgrijper. In het lab bevestigden ze dat inslagen met opgeslagen verenenergie van 8 joule diepe genoeg kuilen konden creëren terwijl ze veel minder initiële druk nodig hadden dan ijsbouten en aanzienlijk minder energie dan thermische ankers. Vervolgens maten ze hoe sterk de uiteindelijke greep was door het apparaat recht van het ijs weg te trekken. Door aan te passen hoe strak de bijlen naar elkaar knijpten, ontdekten ze twee manieren waarop de greep kon falen: bij weinig knijpsterkte schoven de punten uit de kuiltjes; bij zeer grote knijpsterkte braken de ijsrichels zelf af. Tussen deze extremen lag een optimaal bereik waar de grijper meer dan twee keer zijn eigen gewicht kon dragen. Veldtesten op een Franse gletsjer toonden aan dat het apparaat zich kon verankeren op steil, natuurlijk ijs, stevig pak sneeuw en zelfs boomstammen, rotsen en hard aangereden grond, wat bevestigt dat de inslag-en-grijp-methode buiten het lab werkt.
Wat dit betekent voor toekomstige verkenners
De studie toont aan dat breken en knijpen in ijs een zeer efficiënte manier kan zijn voor robots om te klimmen en zich staande te houden in harde, lage-zwaartekrachtomgevingen. Door te profiteren van het feit dat het scheuren van ijs veel minder energie kost dan het smelten ervan, vormt de dubbelbijlgrijper sterke, reversibele ankers met bescheiden krachten en slechts een paar joule energie per stap. Voor missies naar Enceladus of andere ijzige werelden zou zo’n systeem kleine, energiebeperkte robots in staat kunnen stellen veilig in ventielen af te dalen of zich aan klifwanden vast te houden terwijl ze monsters nemen die kunnen onthullen of er leven buiten de aarde bestaat. Hetzelfde idee kan ook aardgebonden robots helpen bij het verkennen van gletsjers, ijsgrotten en brosse rotswanden die te gevaarlijk of ontoegankelijk zijn voor menselijke klimmers.
Bronvermelding: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Trefwoorden: robotisch ijsklimmen, planeetverkenning, robotgrijpers, ijsbreukankering, Enceladus-missies