Clear Sky Science · nl
Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers
Robots That Can Dance Through Traffic
Stel je tientallen vliegende en rijdende robots voor die door een magazijn razen, elkaar nooit raken en hun taken sneller afwerken dan menselijke bestuurders zouden kunnen. Dit artikel beschrijft een nieuwe manier om zulk robot-"verkeer" te choreograferen, zodat veel machines agressief en snel in krappe ruimtes kunnen bewegen zonder de veiligheid te verliezen. Het werk is relevant omdat dezelfde ideeën op den duur robotvloten in fabrieken, magazijnen en bezorgdiensten kunnen aandrijven die continu in onze dagelijkse omgeving moeten werken.
Why Herding Many Robots Is So Hard
Het coördineren van een menigte robots is veel moeilijker dan het sturen van één exemplaar. Elke robot moet van zijn startpunt naar zijn doel komen zonder te botsen, anderen te blokkeren of vast te lopen in eindeloze lussen. Huidige benaderingen bevinden zich vaak aan twee uitersten. Sommige methoden behandelen robots als speelstukken op een raster, wat het plannen voor honderden robots snel en wiskundig overzichtelijk maakt—maar de resulterende paden negeren vaak hoe echte machines bewegen, versnellen of draaien. Andere methoden simuleren de volledige fysieke beweging en leveren mooie, vloeiende paden op, maar worden pijnlijk traag of onbetrouwbaar zodra het aantal robots groter wordt dan een handvol.
A Middle Road: “Concrete” Planning
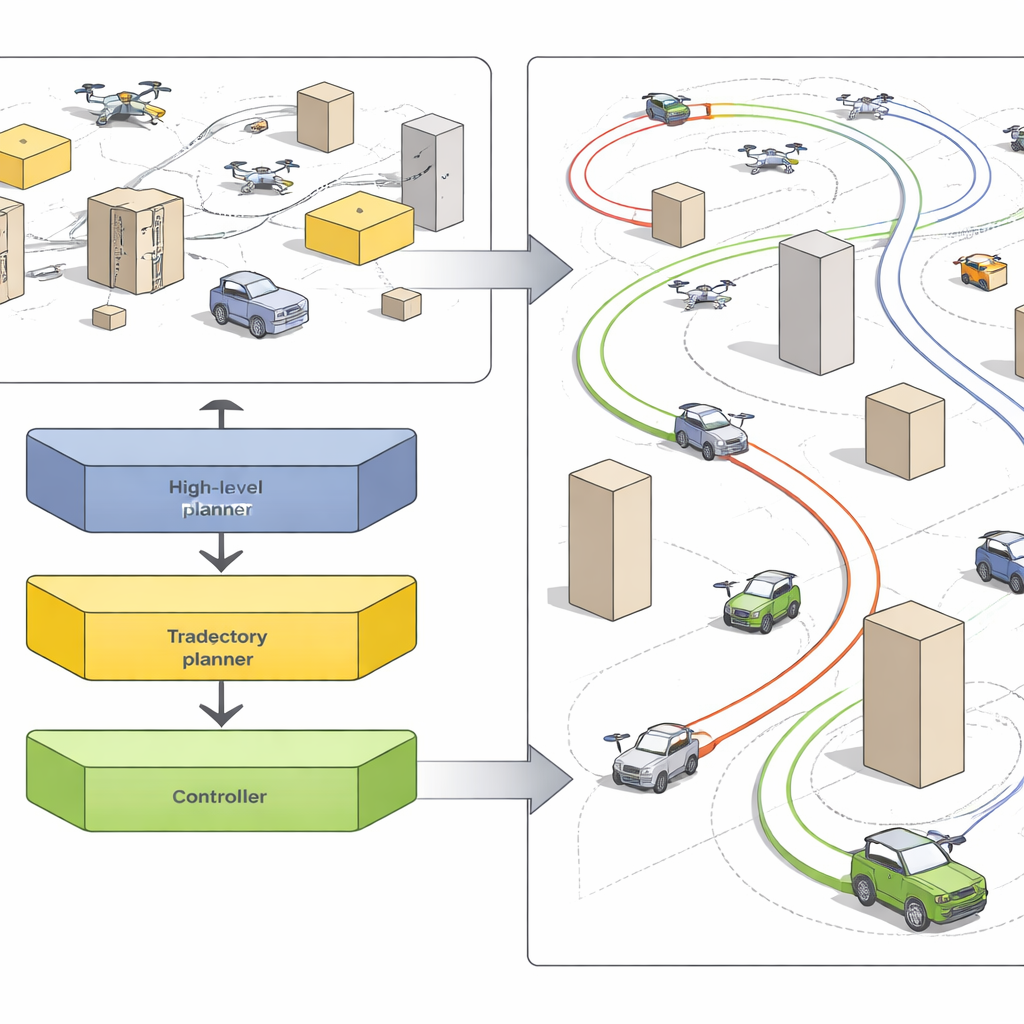
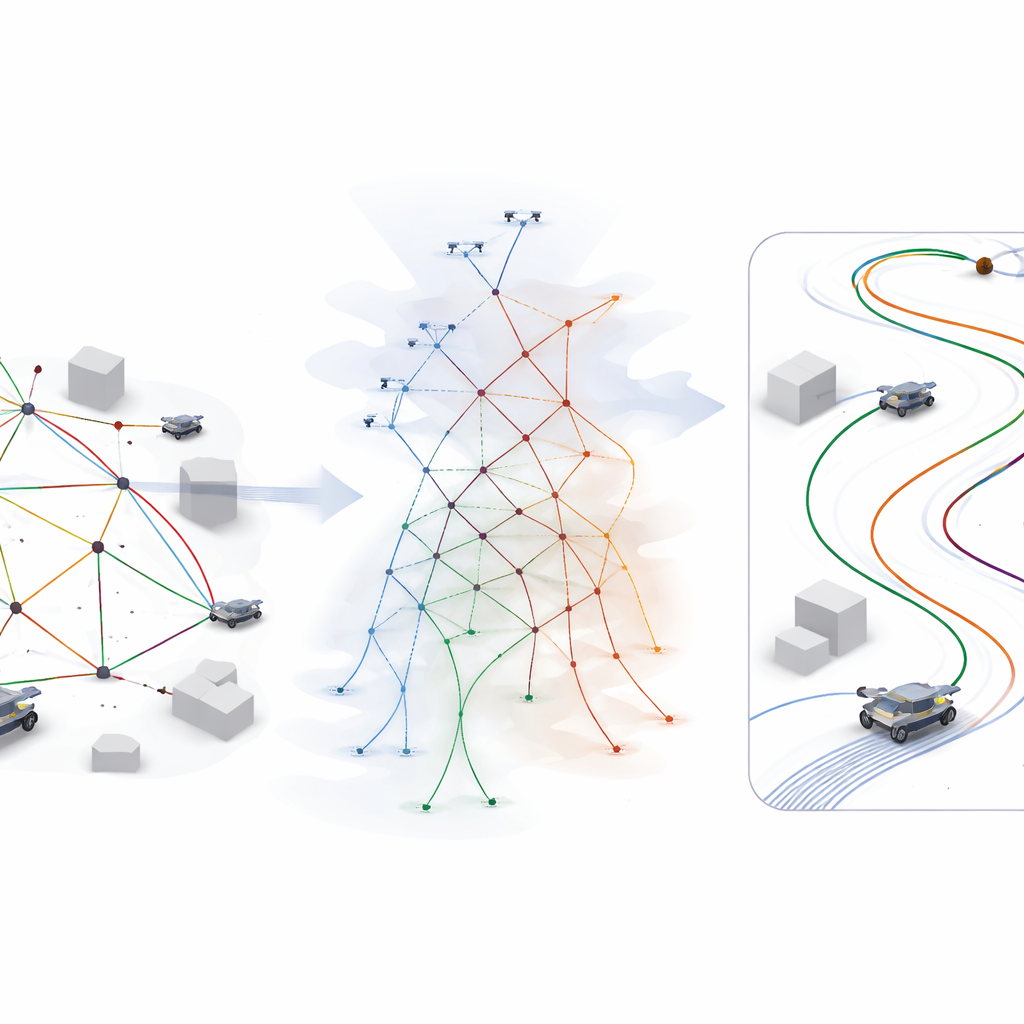
De auteurs stellen een hybride strategie voor die zij “concrete” multi-agent path planning noemen. Het idee is de heldere structuur van rastergebaseerd plannen te mengen met een realistisch beeld van hoe robots daadwerkelijk bewegen. In plaats van puur in een abstract raster of in volledig continue fysica te werken, gebruikt het systeem een gelaagde beschrijving van beweging. Een centrale planner zoekt over een discrete set mogelijke bewegingen voor alle robots tegelijk, maar elke beweging wordt verrijkt met voorspellingen over hoe lang deze zal duren, hoe de robot van zijn beoogde lijn kan afwijken en hoe dicht hij veilig langs anderen kan passeren. Deze voorspellingen komen van datagestuurde modellen die zijn getraind op echte robotexperimenten, zodat de planner "weet" hoe zijn vloot zich in de praktijk gedraagt.
From Rough Sketches to Precise Motion
Zodra de gekoppelde planner veilige, conflictvrije waypoint-reeksen voor elke robot heeft geproduceerd, zoomt het raamwerk in. Een tweede module zet elk grof pad om in een dichte, vloeiende traject die limieten op stuwkracht, sturen en andere fysische factoren respecteert. Om dit snel te doen gebruikten de auteurs eerst zware numerieke optimalisatie offline om veel voorbeelden van bijna tijd-optimale bewegingen te genereren, en trainden daarna transformer-gebaseerde neurale netwerken om die voorbeelden te imiteren. Tijdens uitvoering kunnen deze netwerken referentiepaden van hoge kwaliteit genereren in minder dan een milliseconde. Een derde laag, een model predictive controller uitgerust met een veiligheidsfilter, past continu de besturing aan om deze referenties te volgen en gebruikt lokale sensoren om onverwachte zaken te ontwijken, zoals een zwervend obstakel of een lichte volgfout.
Putting Forty Robots to the Test
Het team demonstreerde hun systeem met een gemengde vloot van 20 quadrotor-drones, 8 grondrobots en 12 robots die als bewegende obstakels fungeerden, allemaal samen opererend in een kamerformaat binnenarena. In één reeks experimenten raceten zwermen drones door nauwe ruimtes met pieksnelheden boven vijf meter per seconde terwijl ze elkaar ontwijken in een soort driedimensionale ballet. In een andere reeks staken grondrobots herhaaldelijk een rommelig gebied over met willekeurig bewegende obstakels, en voltooiden meer missies met minder stops en zonder botsingen dan concurrerende methoden. De meest veeleisende proeven omvatten alle 40 robots die meerdere missies achter elkaar uitvoerden, waarbij het systeem continu paden herplantte op aanvraag zonder deadlocks of crashes.
Hints of Future Delivery and Warehouse Systems
Om te laten zien hoe dit in echte taken kan vertalen, monteerden de auteurs mock-"last‑mile" leveringen en magazijnoperaties. In het bezorgscenario droegen grondrobots drones naar een "oever", waar de drones opstegen, naar verspreide afleverpunten vlogen, terugkeerden naar hun mobiele bases en vervolgens terugreden naar het startgebied—terecht terwijl ze bewegende obstakels ontwijkten. In de magazijnsimulatie vervoerden teams drones herhaaldelijk virtuele pakketten tussen schappen en afleverzones, waarbij ze dichte, wendbare beweging en hoge doorvoer handhaafden. Deze casestudies vroegen slechts geringe afstemming van het raamwerk, wat de aanpasbaarheid aan nieuwe platforms en taken onderstreept.
What This Means Going Forward
In eenvoudige bewoordingen toont dit werk aan dat het mogelijk is grote teams robots zowel gedurfd als veilig te laten bewegen in krappe, veranderende ruimtes door zorgvuldig snelle high-level planning, realistische bewegingsmodellen en laatste-redmiddel veiligheidscontroles te combineren. De "concrete" benadering zet abstracte plannen om in bewegingen die echte machines op snelheid kunnen uitvoeren, terwijl ze toch garanties biedt tegen botsingen en deadlocks in veel praktische situaties. Hoewel extreem chaotische omgevingen en volledig onbekende ruimtes uitdagend blijven, wijst het raamwerk op een toekomst waarin vloten van bezorgdrones, magazijnrobots en andere robotwerkers drukke omgevingen kunnen delen zonder constante menselijke supervisie.
Bronvermelding: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Trefwoorden: multi-robot coordination, path planning, robot swarms, warehouse automation, drone delivery