Clear Sky Science · nl
Insect-geïnspireerde adaptieve gedragscompensatiestrategie tegen olfactorische sensorische tekortkoming voor robotische lokalisatie van geurbronnen
Waarom het verliezen van een sensor niet betekent dat het spoor verloren is
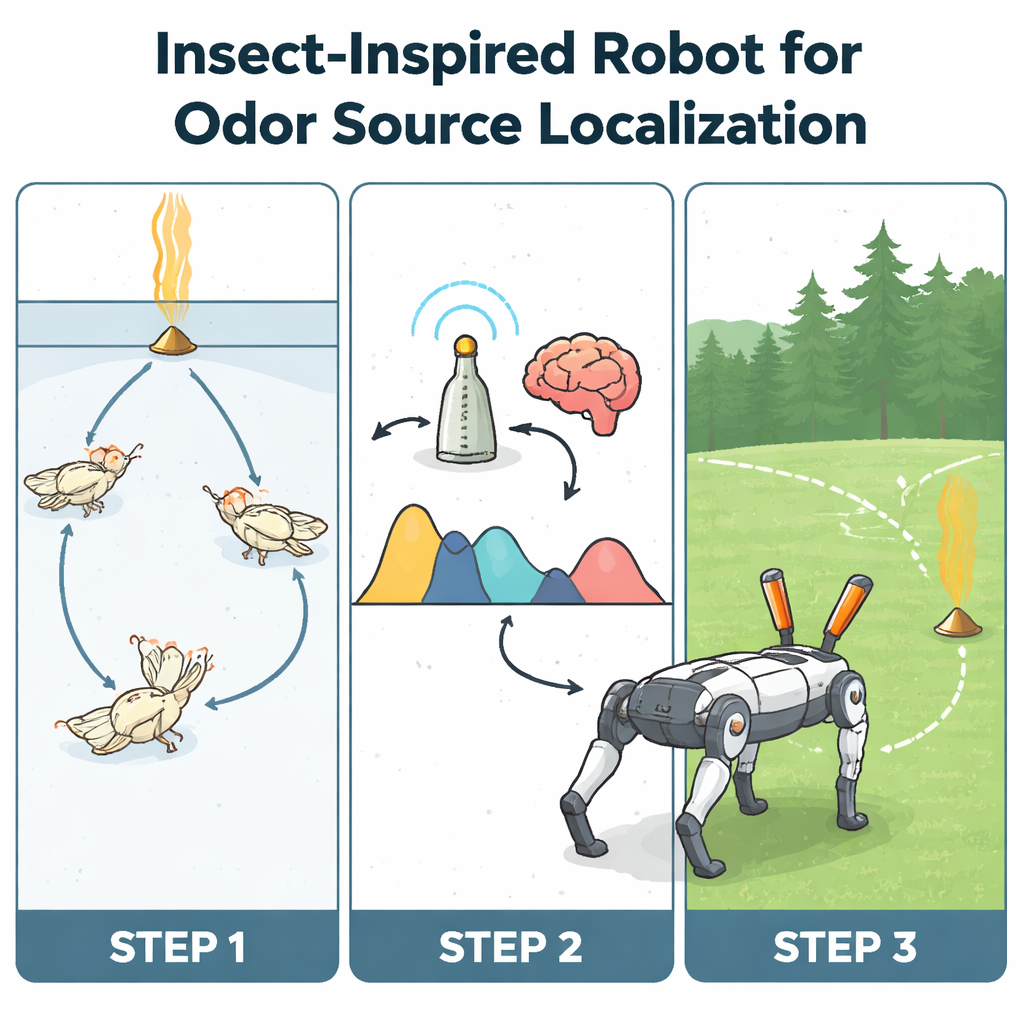
Stel je een zoek- en reddingsrobot voor die een gaslek of een vastzittende overlevende in een ingestort gebouw probeert op te sporen — en dan breekt een van zijn sleutelsensoren. Hedendaagse robots falen vaak ernstig bij dat soort schade. Deze studie haalt inspiratie uit een verrassende expert in geur-gebaseerde navigatie, de mannelijke zijdevlinder, om te laten zien hoe dieren een geurbron kunnen blijven volgen zelfs nadat ze de helft van hun “neus” kwijtgeraakt zijn, en hoe die strategie kan worden gekopieerd in viervoetige robots.
Een kleine navigator met een krachtige reukzin
Veel dieren — van insecten tot honden — gebruiken vluchtige chemische signalen om voedsel, partners of veilige schuilplaatsen te vinden. Geuren zijn vooral nuttig wanneer zicht wordt belemmerd door duisternis, rook of puin. Maar echte geurpluimen zijn rommelig: de wind draait, gebouwen en bomen buigen de stroming en de sterkste geur ligt niet altijd recht tegen de windrichting in van de bron. De meeste geurzoekende robots nemen aan dat al hun geursensoren perfect werken en dat geur- en windrichting netjes samenvallen. In het veld klopt geen van beide veronderstellingen. De zijdevlinder Bombyx mori biedt een natuurlijk tegenvoorbeeld: de mannetjes kunnen vrouwtjes die feromonen uitstoten lokaliseren zelfs in turbulente lucht en, intrigerend genoeg, zelfs wanneer een van hun twee antennes — hun belangrijkste reukorganen — is verwijderd.
Hoe vlinders omgaan met het verlies van een antenne
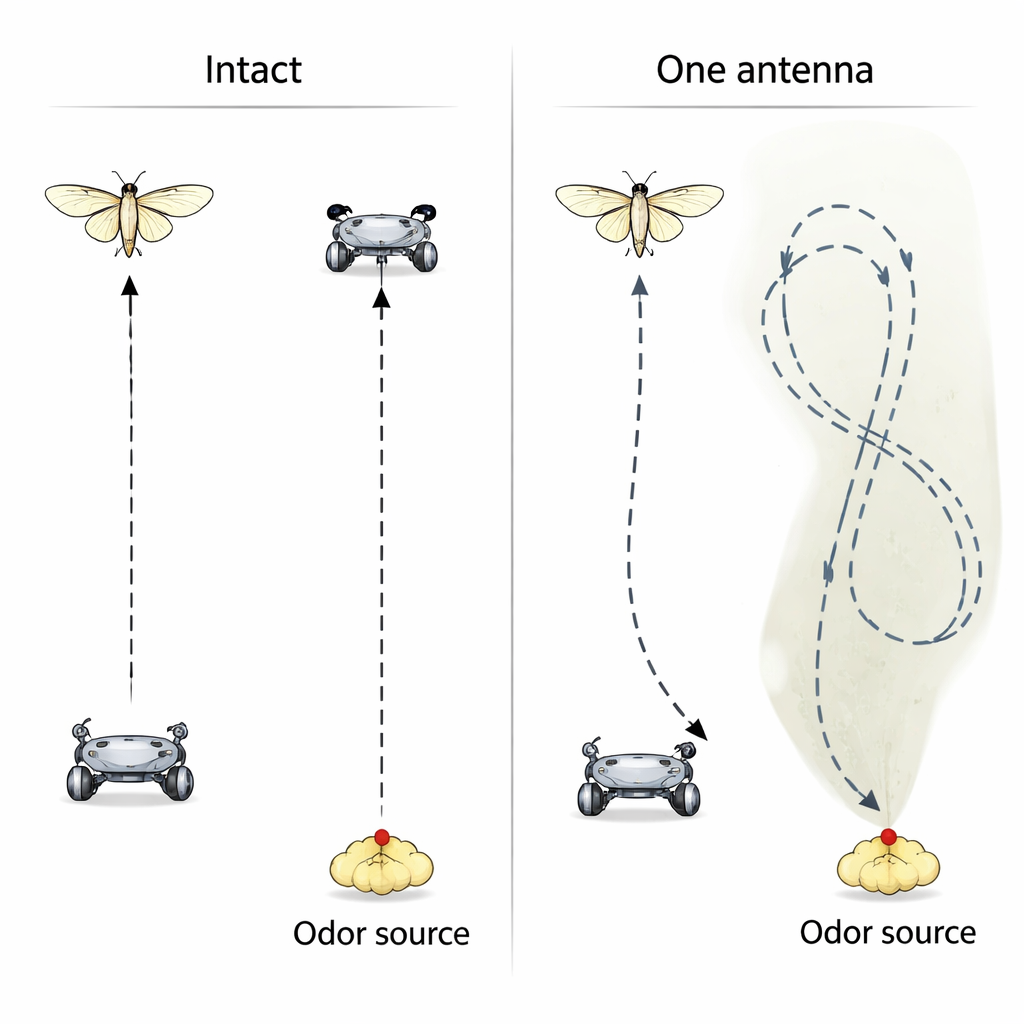
De onderzoekers testten eerst hoe goed intacte mannelijke zijdevlinders, en vlinders met de linkerantenne verwijderd, naar een geurbron konden lopen in het laboratorium. Beide groepen begonnen 15 centimeter van een feromoon-uitstralend punt. Verrassend genoeg daalde de succeskans — het bereiken van de bron binnen een minuut — niet significant na het verwijderen van één antenne. Wat wel veranderde was het pad: intacte vlinders marcheerden vaak langs een redelijk rechte route, terwijl vlinders met één antenne langere, kronkelende paden namen die naar de zijde van de overgebleven antenne kromden. Gedetailleerde metingen van hoofdbewegingen toonden dat de vlinders hun draaistrategie aanpasten afhankelijk van waar langs de overgebleven antenne de geur werd gedetecteerd — dicht bij de basis of dicht bij de punt — en in welke richting ze op dat moment draaiden.
Twee eenvoudige regels verscholen in complex gedrag
Door herhaaldelijk geurpulsen links en rechts te geven en de hoofdhoeken van de vlinders te volgen, zette het team gedrag om in waarschijnlijkheidscurven die laten zien hoe waarschijnlijk het was dat een vlinder links of rechts zou draaien na elke puls. Wanneer een geur dicht bij de basis van de antenne arriveerde, gaf de vlinder sterk de voorkeur aan het blijven draaien naar diezelfde zijde, waarbij hij in feite doorging met de huidige bocht. Wanneer de geur de punt raakte, werd de keuze meer in balans, met een lichte neiging om de tegenovergestelde zijde te verkennen. Simpel gezegd maakte het verlies van een antenne de vlinder niet opgeven; het liet de vlinder een zoekpatroon aannemen dat beide zijden van de ruimte uitgebreider bekijkt, vooral langs de “rand” van de geurpluim waar geurintensiteit snel verandert.
Een viervoetige robot leren ruiken als een vlinder
Vervolgens bouwden de onderzoekers een viervoetige robot met geursensoren op de “kop”, gerangschikt om de basis-tot-punt-structuur van een antenne na te bootsen. Ze creëerden twee zoekalgoritmen. Het eerste, een standaard vlinder-geïnspireerde aanpak genaamd SZL (voor surge–zigzag–loop), gaat uit van twee werkende geursensoren en kiest zijn rechte “surge”-richting op basis van het relatieve tijdstip van detecties links en rechts. Het tweede, contextafhankelijk vlinder-geïnspireerd (CDMI), bevat de nieuwe vlinderregels: het schat waar langs de overgebleven sensor een geur werd gedetecteerd en gebruikt de uit de dierexperimenten afgeleide waarschijnlijkheidscurven om te beslissen welke kant op te bewegen en hoe scherp te draaien. In binnentests werkte SZL het beste wanneer beide sensoren intact waren, met snelle, redelijk rechte paden. Maar wanneer één sensor was uitgeschakeld, presteerde CDMI duidelijk beter dan SZL en vond het de bron vaker door de veranderende rand van het geurveld te volgen in lusachtige trajecten die vergelijkbaar zijn met die van de één-antenne vlinders.
Robots die slim blijven wanneer iets kapotgaat
Om het idee verder te testen, plaatste het team hun robots buiten, waar natuurlijke wind en turbulentie geurpluimen sterk patchy maken. Ze gaven de intacte robot het conventionele SZL-algoritme en de “één-sensor” robot het CDMI-algoritme. Beide behaalden vergelijkbare succeskansen, maar de beschadigde robot die de vlinder-geïnspireerde adaptieve strategie gebruikte vond de bron vaak met kortere, minder kronkelende paden. Dit suggereert dat het in ruwe, echte-wereldomstandigheden beter kan zijn om over te schakelen van een precieze maar kwetsbare sensormethode naar een meer verkennende, rand-volgende strategie. De bredere boodschap is dat robuuste navigatie geen steeds complexere kunstmatige intelligentie vereist. In plaats daarvan kunnen eenvoudige, biologisch gefundeerde regels — gekoppeld aan hoe sensoren over het lichaam verdeeld zijn en hoe het lichaam met de omgeving interageert — helpen robots te creëren die blijven werken zelfs wanneer belangrijke onderdelen falen, een cruciale eigenschap voor langdurige verkennings- en reddingsmissies.
Bronvermelding: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Trefwoorden: olfactorische navigatie, bio-geïnspireerde robotica, lokalisatie van geurbronnen, insect-geïnspireerde AI, belichaamde intelligentie