Clear Sky Science · nl
Voelbaar reagerende grijper met een actieve palm voor vaardige manipulatie
Robots die voelen wat ze vasthouden
Stel je een robot voor die zacht een rijpe aardbei kan plukken, een kinderveilige fles kan open draaien of een lamp kan indraaien boven je hoofd—en dat allemaal zonder iets te pletten, laten vallen of verkeerd uit te lijnen. Dit artikel beschrijft een nieuwe robotgrijper die machines dichter bij dat zorgvuldige, mensachtige handvaardigheid brengt door de robot niet alleen slimme vingers te geven, maar ook een actieve, zeer gevoelige palm.
Een palm die meer doet dan alleen vasthouden
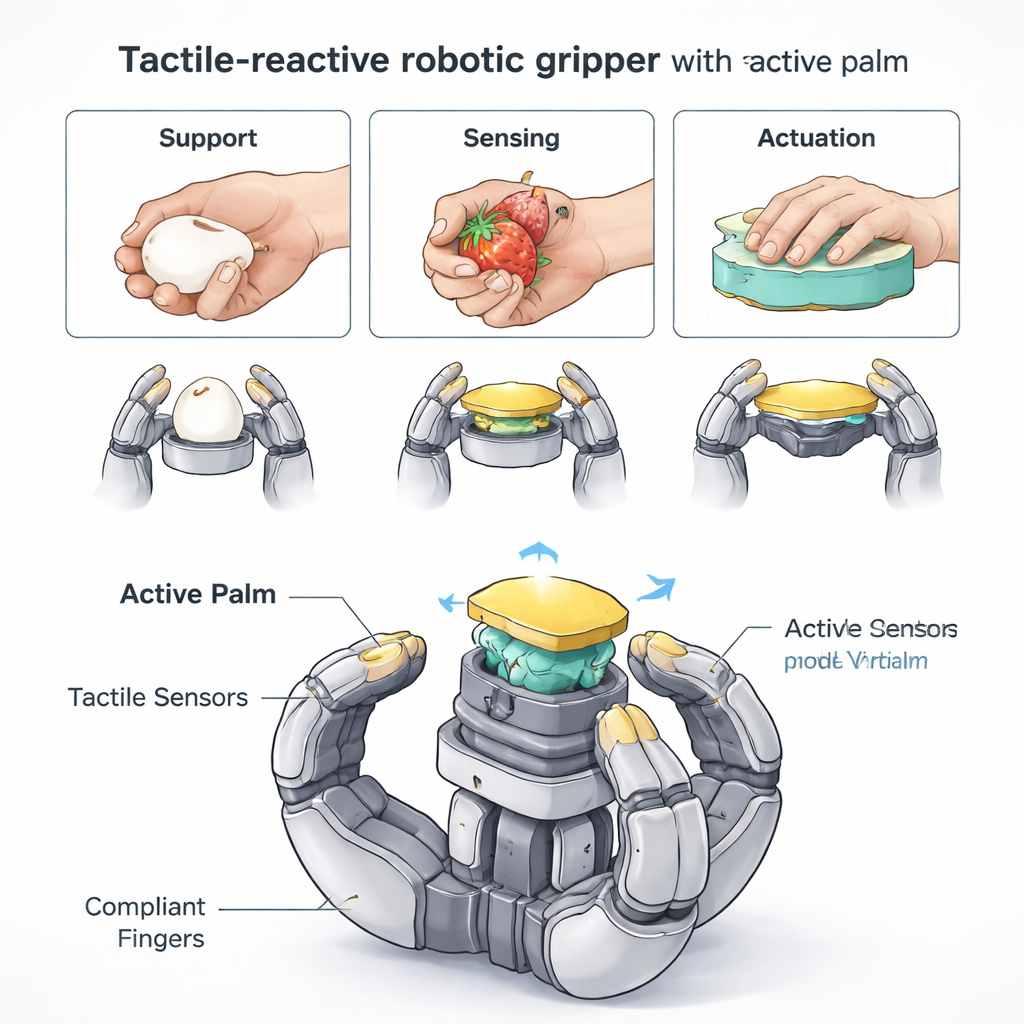
De meeste robothanden hebben tegenwoordig ofwel eenvoudige, stijve klauwen die alleen kunnen grijpen, of zeer complexe meervingerige handen die moeilijk te bouwen en te besturen zijn. Een belangrijk inzicht in dit werk is dat menselijke handen sterk afhankelijk zijn van de palm—niet alleen van de vingers—voor steun, gevoel en duwen. De onderzoekers ontwierpen een drievingerige robotgrijper met een centrale palm die op en neer kan bewegen en bedekt is met een cameragebaseerde aanrakingsensor. Elke vingertop heeft bovendien een flexibel drukgevoelig kussen. Samen laten deze onderdelen de grijper voelen waar en hoe hij een object raakt en zijn greep in real time aanpassen, ondanks dat het hele systeem slechts zeven beweegbare gewrichten gebruikt.
Eenvoudige bewegingen, veel grijpmogelijkheden
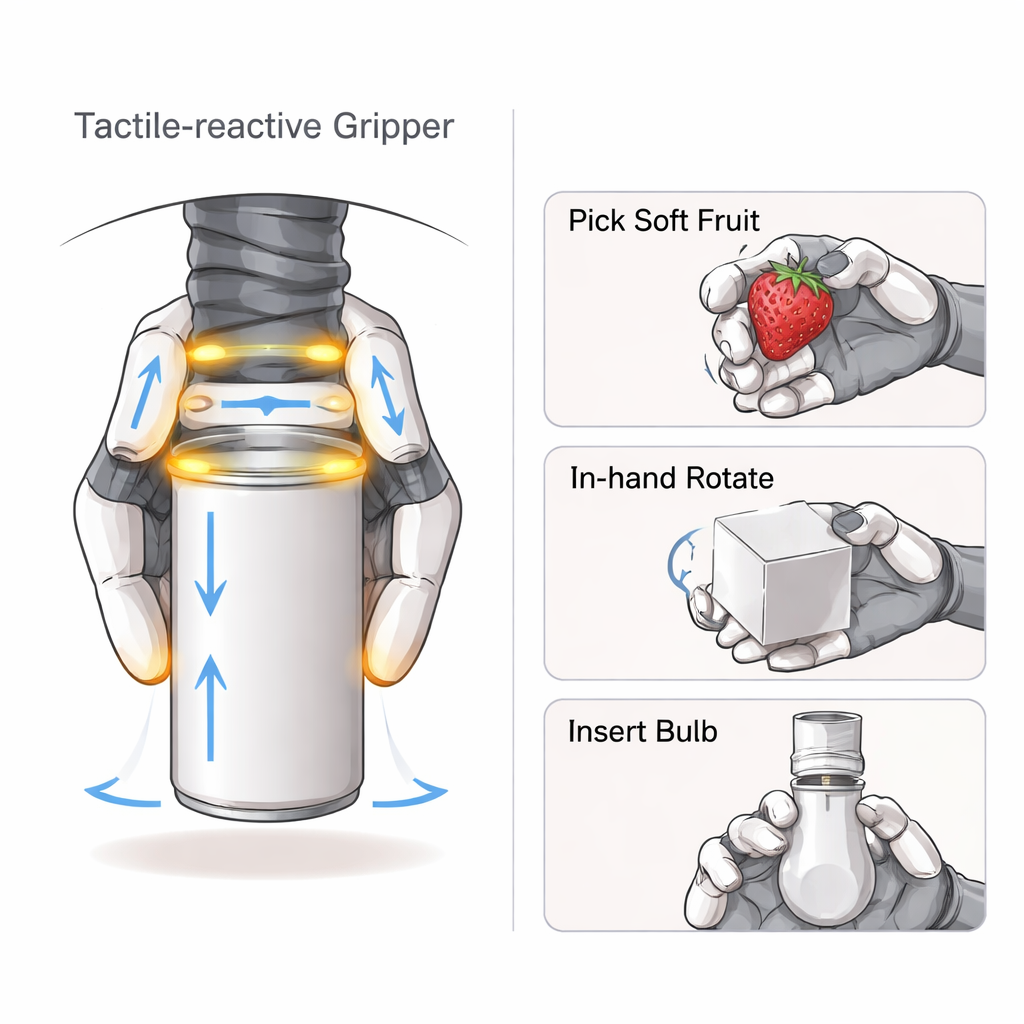
De drie identieke vingers van de grijper kunnen zwenken en buigen, waardoor meerdere alledaagse grijpmodes mogelijk zijn: het omsluiten van grote voorwerpen zoals ballen, het pincetten van dunne objecten zoals kaarten, en het klemmen van zware gereedschappen in een powergrip. De zachte, ruggegraatachtige vingerstructuur wikkelt zich van nature rond objecten van verschillende vormen zonder ingewikkelde programmering. Intussen schuift de palm verticaal als een lift, zodat hij tegen een object kan drukken, de belasting met de vingers kan delen of de positie van het object in de hand kan verschuiven. Simulaties en experimenten laten zien dat zelfs met slechts twee gewrichten per vinger plus de bewegende palm, de hand voorwerpen in veel richtingen kan verplaatsen en onhandige, moeilijk te besturen houdingen kan vermijden.
Voelen met zowel vingers als palm
Om te begrijpen wat hij vasthoudt, combineert de grijper drie soorten sensoring: gedetailleerde aanrakingbeelden van de palm, drukkaarten van de vingertoppen en metingen van zijn eigen gewrichtshoeken. Een machine-learningsysteem fuseert deze signalen en besteedt meer aandacht aan de aanwijzingen die voor een bepaald object het nuttigst zijn. In tests met blikjes en ballen van verschillende maten en materialen kon het systeem herkennen wat het vasthield met bijna 99% nauwkeurigheid. Dit rijke gevoel voor aanraking stuurt ook hoe hard er gedrukt moet worden, wanneer het sluiten van de vingers moet stoppen en hoe de palm moet bewegen om contact stabiel te houden zonder te veel wrijving te veroorzaken.
Van testobjecten naar fruit en lampen
Het team heeft de grijper getest met een veelgebruikte benchmark voor robotgrijpen op alledaagse objecten zoals ballen, gereedschap en kleine schroefonderdelen. Hij scoorde hoger dan verschillende bekende onderzoeksgrijpers terwijl hij minder bewegende onderdelen gebruikte. Buiten de testsets toonde de grijper aan dat hij breekbaar fruit—aardbeien, druiven, tomaten en meer—kon oppakken zonder zichtbare kneuzingen, zelfs dagen later nog bevestigd onder ultraviolet licht. Hij kon ook blokken en cilinders nauwkeurig vertalen en roteren in zijn hand, een lamp in een naar boven gerichte fitting draaien, een spuitzuiger indrukken terwijl hij het vat vasthoudt, en kinderveilige doppen openen door te drukken en te draaien. Bij veel van deze taken leverde de bewegende palm de extra duwkracht, ondersteuning of sensing die standaard alleen‑vinger‑grijpers missen.
Waarom dit belangrijk is voor toekomstige robots
Het werk toont aan dat robots niet altijd meer en meer vingers of gewrichten nodig hebben om vaardig te zijn. Door een paar compliant vingers zorgvuldig te coördineren met een actief aangestuurde, aanrakingsgevoelige palm, bereikt deze grijper een mix van kracht, gevoeligheid en bewustzijn die begint te lijken op een menselijke hand. Omdat de onderdelen grotendeels 3D-geprint zijn en gebruikmaken van commercieel verkrijgbare sensoren, is het ontwerp relatief eenvoudig te reproduceren. Met verdere leergebaseerde besturing zouden vergelijkbare grijpers robots kunnen helpen boodschappen te pakken, ondersteuning bieden in de thuiszorg of veilig samenwerken met mensen in fabrieken—verzekerd voelen wat ze doen in plaats van alleen maar te raden.
Bronvermelding: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Trefwoorden: robotgrijper, tactiele sensing, vaardige manipulatie, robothand, actieve palm