Clear Sky Science · nl
Het benutten van proprioceptie in zachte watervleugels mogelijk maakt hybride passieve-actieve verstoringsonderdrukking
Slimme vleugels onder water
Wie een vogel heeft zien stilhangen in harde wind of een vis heeft zien standhouden in een sterke stroming, heeft gezien hoe de natuur een moeilijk technisch probleem oplost: hoe je op koers blijft wanneer het omringende fluïdum zich niet gedraagt. Deze studie toont hoe een nieuw type zachte onderwatervleugel, uitgerust met een “zelfgevoel” vergelijkbaar met proprioceptie bij dieren, automatisch plotselinge stromingsveranderingen kan voelen en van vorm kan veranderen om stabiel te blijven. Het werk wijst de weg naar toekomstige onderwaterrobots die meer als dieren glijden en minder als stijve machines, waardoor ze energie besparen terwijl ze ruwe omstandigheden aankunnen.
Leren van vogels en vissen
In de natuur zijn vleugels en vinnen geen stijve bladen; ze buigen, draaien en flexen. Vogels voelen luchtbeweging via kleine receptoren in hun veren, terwijl vissen druksensitieve cellen langs hun lichaam en in hun vinstralen gebruiken. Deze ingebouwde sensoren laten dieren voelen hoe hun aanhangsels vervormen in bewegend water of lucht en bijna onmiddellijk reageren, waardoor windstoten en turbulentie worden afgewezen. Daarentegen gebruiken de meeste onderwatervoertuigen stijve stuurvlakken en afzonderlijke instrumenten om de stroming te meten, wat hen traag en energie-intensief maakt wanneer de omgeving chaotisch wordt. De auteurs betogen dat het combineren van flexibiliteit en sensoren in één zachte structuur deze kloof kan verkleinen.
Een zachte vleugel met ingebouwde zintuigen
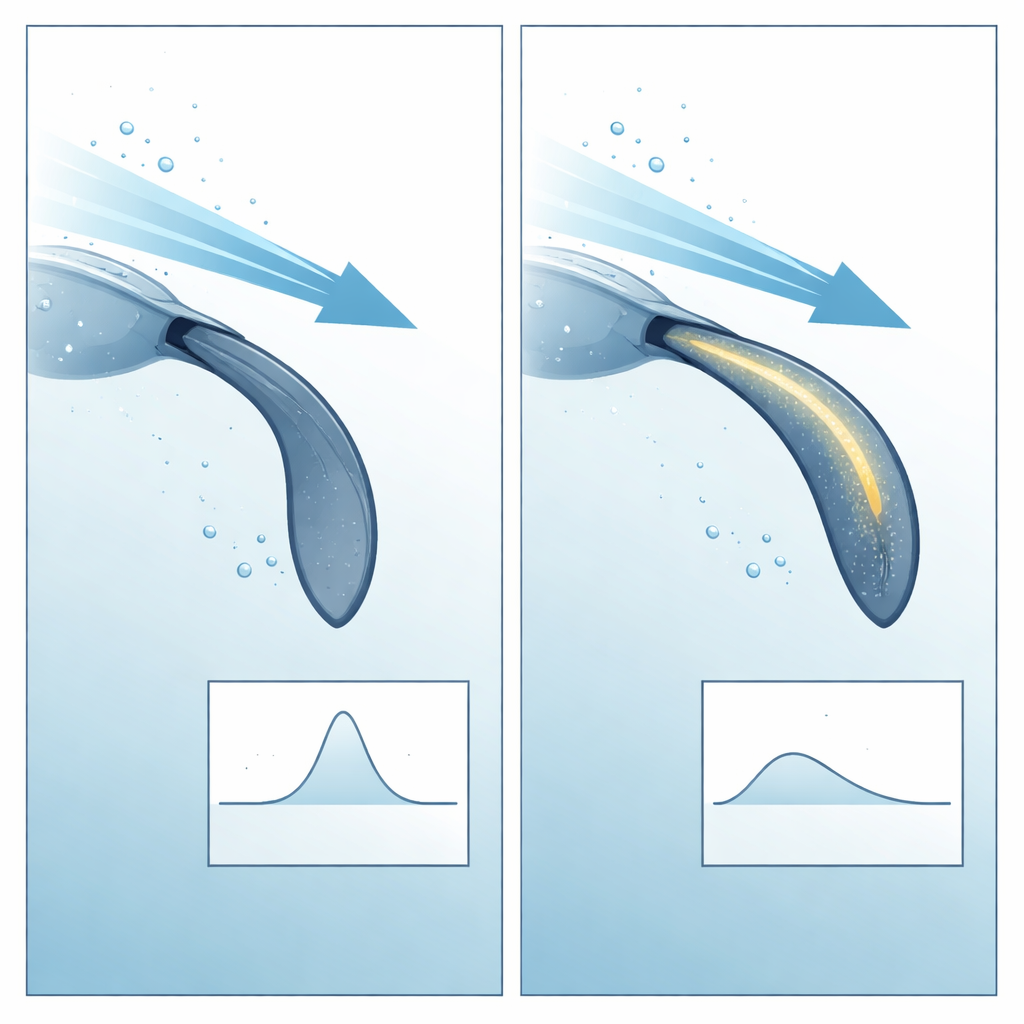
Het team bouwde een halve vleugel voor onderwatergebruik die een zachte, buigzame staart aan een stijve neus koppelt. In het zachte gedeelte lopen opblaasbare buizen gevuld met vloeistof, die kunnen worden geactiveerd om de kromming of camber van de vleugel te veranderen. Aan de buitenkant hebben ze een dunne elektronische “huid” van siliconen met vloeibare-metaaldraadjes aangebracht. Als de vleugel buigt, verandert de afstand tussen deze ingebedde geleiders, wat hun elektrische capaciteit verandert. Door een eenvoudig machine-learningmodel te trainen om deze signalen te koppelen aan door camera’s getrackte vormen, veranderden de onderzoekers de e-huid in een zeer nauwkeurige vormsensor. Eenmaal getraind kan het systeem de camber van de vleugel in realtime inschatten zonder externe camera’s, zelfs ondergedompeld.
Vorm omzetten in sturing
Met deze proprioceptieve zachte vleugel gemonteerd in een watertunnel simuleerden de onderzoekers windstoten als plotselinge veranderingen van de hoek van de vleugel ten opzichte van de stroming. Eerst toonden ze, onder stabiele condities, aan dat ze door de camber aan te passen dezelfde lift bij verschillende stroomhoeken konden produceren, of verschillende liftwaarden bij dezelfde hoek. Dit betekent dat wanneer een windstoot de vleugel uit balans wil brengen, er een “pad” in vormruimte bestaat dat de gewenste lift kan herstellen. Vervolgens programmeerden ze een geidealiseerde open-loopreactie—waarbij precies bekend is wanneer de windstoot optreedt—om de interne buizen op de juiste momenten op te blazen of leeg te laten lopen. In dit best-case-scenario verminderde het veranderen van de camber de daling in lift tijdens een verstoring van ongeveer 50% naar ongeveer 10%.
De vleugel autonoom laten reageren
De zwaardere test was de vleugel zelf te laten beslissen wanneer er iets mis was. Hier herkent de e-huid een karakteristische “handtekening” in het cambersignaal: een snelle overshoot en oscillatie terwijl het zachte lichaam veert onder een plotselinge stromingsverandering. Wanneer dit patroon verschijnt, blaast een eenvoudige regelaar de buizen op in de richting die het waarschijnlijkst is om de lift weer naar het doel terug te brengen, zonder expliciet de stroming of krachten te berekenen. Zelfs deze minimalistische strategie werkt goed. Vergeleken met een equivalent stijve vleugel vermindert de niet-geactueerde zachte vleugel op zichzelf de impuls van een windstoot—in wezen de totale duw over de tijd—met ongeveer een factor drie. Wanneer actieve sturing wordt toegevoegd, wordt de totale ongewenste liftimpuls met tot 87% teruggebracht, wat de windstootafhandelingscapaciteit van sommige vogels benadert en zelfs overtreft, zij het in een ander medium.
Waarom dit belangrijk is voor toekomstige robots
Voor een niet-specialistische lezer is de belangrijkste conclusie dat het maken van onderwaterrobots die zachter en meer zelfbewust zijn, ze zowel robuuster als efficiënter kan maken. In plaats van verstoringen te bestrijden met brute-krachtmotoren en complexe externe sensoren, helpen het flexibele lichaam van de robot en de ingebedde huid de stroming te absorberen en te lezen, waardoor bescheiden vormveranderingen worden geactiveerd die hem op koers houden. Hoewel deze studie zich richt op een enkele experimentele vleugel in een gecontroleerd bad, zouden dezelfde principes toepasbaar kunnen zijn op volledige voertuigen of op visachtige zwemmende robots. Op de lange termijn kan dergelijke “belichaamde intelligentie” machines in staat stellen turbulente oceanen te verkennen met dezelfde stille gratie die vogels en vissen al in lucht en water tonen.
Bronvermelding: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Trefwoorden: zachte robotica, onderwatervoertuigen, biogeïnspireerd ontwerp, afwijzing van stromingsverstoringen, proprioceptieve sensoren