Clear Sky Science · nl
Belichaamde tactiele waarneming van eigenschappen van zachte voorwerpen
Waarom het belangrijk is robots te leren voelen
Stel je een robot voor die voorzichtig iemands buik onderzoekt, rijp fruit sorteert zonder het te kneuzen, of breekbare onderdelen alleen op gevoel monteert. Om dit veilig te doen, moeten robots zachte voorwerpen op een rijke, mensachtige manier leren “voelen”. Dit artikel beschrijft hoe onderzoekers een elektronische huid en een nieuw soort leermodel bouwden zodat robots beter de zachtheid, vorm en oppervlaktetextuur van knedende voorwerpen kunnen waarnemen—zodat machines een stap dichterbij echt vingergevoel komen.
Een hightech gevoel voor aanraking opbouwen
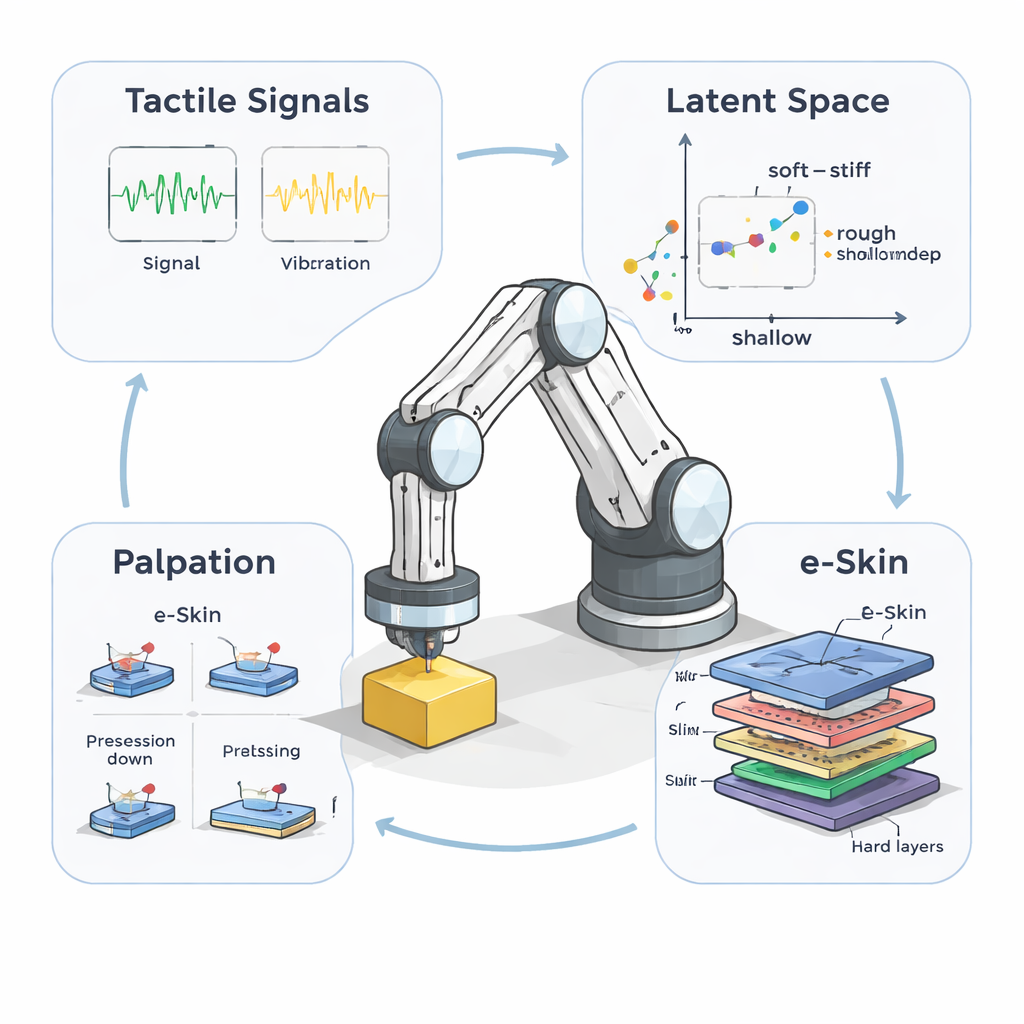
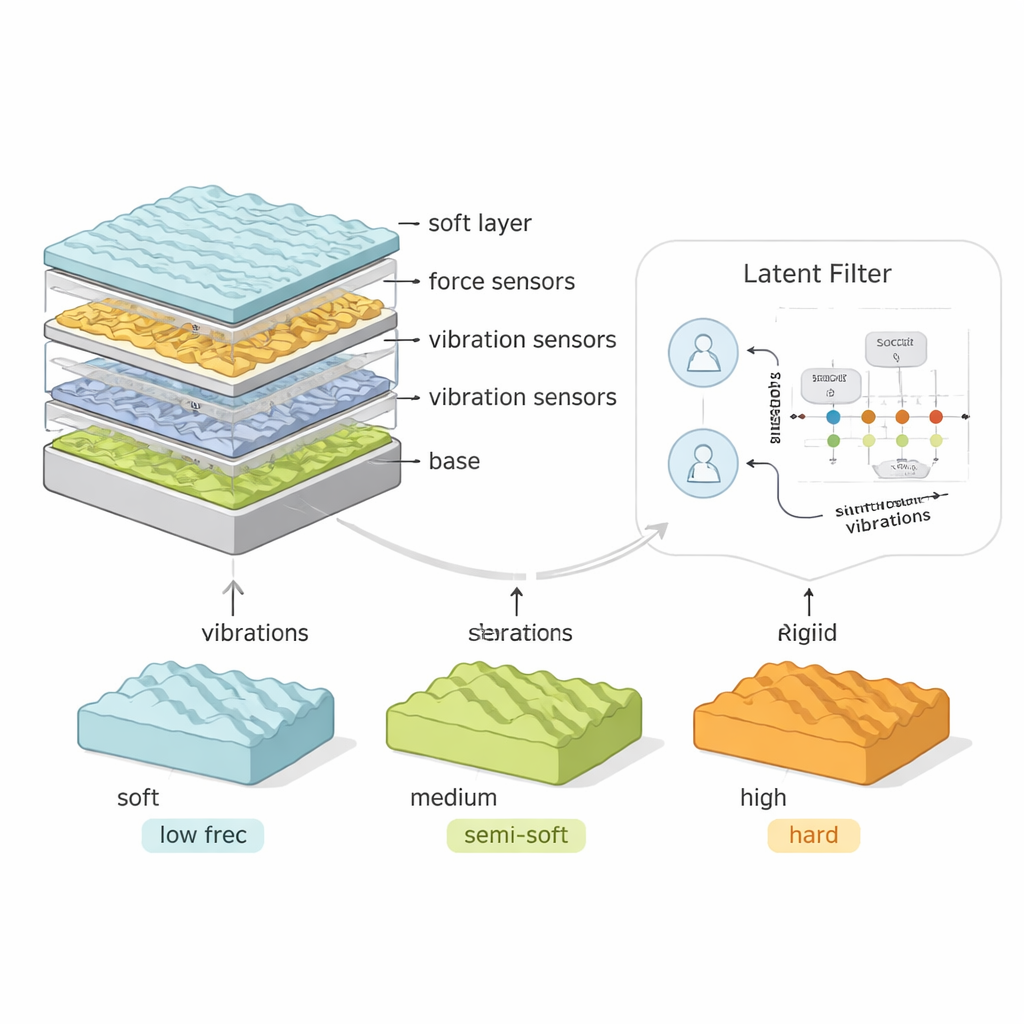
Menselijke huid is zacht, gelaagd en uitgerust met verschillende drukreceptoren die reageren op druk, rek en trilling. Het team wilde deze mogelijkheden nabootsen in een robot. Ze creëerden een modulaire elektronische huid, of e‑Skin, gemaakt van opgestapelde siliconenlagen met ingebedde sensoren. Twee lagen bevatten dichte rastervelden van krachtsensoren die meten hoeveel de huid op verschillende plaatsen ingedrukt wordt, terwijl een derde laag kleine versnellingsmeters huisvest die snelle trillingen oppikken, zoals het gezoem dat je voelt wanneer je met een vinger over ruw textiel glijdt. Door typen siliconen te wisselen konden ze de e‑Skin zelf zachter of stijver maken, en door sensorlagen aan of uit te schakelen konden ze verschillende combinaties van “zintuigorganen” testen.
Een wereld van zachte dingen ontwerpen
Om aanraking op een gecontroleerde manier te bestuderen had het team meer nodig dan eenvoudige rubberblokken. Ze maakten een bibliotheek van “golfvoorwerpen” met zorgvuldig afgestemde eigenschappen. Elk object had een geribbelde bovenzijde waarvan de bulten ondiep of hoog (amplitude) en dicht bij elkaar of ver uit elkaar (ruimtelijke frequentie) konden zijn, en elk werd gegoten uit materialen variërend van zeer zacht siliconen tot rigide plastic. Sommige monsters verbergen ook een dunne stijve laag onder een zachte bovenlaag, als nabeeld van weefsels of materialen die veranderen naarmate je dieper drukt. Dit stelde het team in staat om de exacte zachtheid en textuur van elk voorwerp te kennen dat de robot aanraakte, zodat ze konden vergelijken wat de robot “voelde” met de werkelijke waarden.
Robots leren verkennen via aanraking
Net zoals mensen prikken, drukken en hun vingers schuiven om een voorwerp te beoordelen, gebruikte de robot drie basale palpatiebewegingen. Bij drukken bewoog hij recht op en neer om de algemene zachtheid te onderzoeken. Bij precessie kantelde en rolde hij de e‑Skin, waardoor meerdere aangrenzende gebieden contact maakten en complexere vormen werden onderzocht. Bij schuiven bewoog hij zijdelings over het oppervlak om fijne texturen en wrijving te benadrukken. Voor elk object voerde de robot deze bewegingen uit met verschillende dieptes en snelheden, wat duizenden tijdsvarierende raaksignalen genereerde—krachten die over de huid veranderen en trillingen die erdoorheen lopen. Deze rijke, dynamische datastromen zijn veel informatiever dan een enkele statische prik.
Verborgen patronen in aanraking ontdekken
Om deze informatiestroom te begrijpen introduceerden de auteurs een machinaal-leermodel dat ze de Latent Filter noemen. In plaats van rechtstreeks objecten te labelen leert het model een interne “kaart” waarin elk punt de voortgaande interactie van de robot met een object samenvat. Deze latente ruimte is zo gestructureerd dat sommige componenten snel reageren op directe aanrakingssignalen, terwijl andere informatie langzaam over de tijd integreren. Door de Latent Filter te trainen op vele interacties toonden ze aan dat deze interne kaart vanzelf samenvalt met zinvolle fysieke eigenschappen zoals oppervlaktestructuur, bulthoogte en stijfheid—ook al kreeg het model deze labels nooit expliciet. Een aparte regressiestap bevestigde dat deze verborgen kenmerken de werkelijke mechanische eigenschappen van een object met goede nauwkeurigheid konden voorspellen.
Hoe huid, zintuigen en beweging samenwerken
De experimenten lieten zien dat geen enkele sensorlaag of bewegingsstrategie in alle situaties het beste is. Het combineren van vibratie‑ en krachtsinformatie via een “late fusion” aanpak—waarbij elk type signaal afzonderlijk wordt verwerkt voordat ze worden samengevoegd—leverde het meest betrouwbare begrip van zachte voorwerpen op. Twee krachtlagen hielpen het systeem schuifkrachten en rek waar te nemen, wat essentieel is voor het detecteren van stijfheid en verborgen interne structuren, terwijl trillingen bijzonder nuttig waren om fijne texturen tijdens het schuiven te voelen. De mechanische zachtheid van de e‑Skin zelf bleek ook van belang: stijvere huiden waren beter voor het meten van algemene stijfheid en vorm, terwijl zachtere huiden uitblonken in het waarnemen van subtiele variaties in toegeeflijke of gelaagde materialen. De resultaten suggereren dat robotaanraking co‑ontworpen moet worden: de eigenschappen van de huid, de sensorelektronica en de manier waarop de robot beweegt moeten samen worden afgestemd.
Wat dit betekent voor alledaagse robots
Door een gelaagde, door mensen geïnspireerde e‑Skin te verenigen met een krachtig leermodel dat het belang van actie erkent, laat dit werk zien hoe robots een dieper gevoel van aanraking kunnen ontwikkelen. In plaats van alleen te vertrouwen op camera’s of eenvoudige krachtdrempels, zouden toekomstige machines kunnen voelen hoe een voorwerp toegeeft, trilt en verandert tijdens verkenning, en vervolgens hun greep of beweging direct aanpassen. Zulke mogelijkheden zijn essentieel voor toepassingen zoals medische palpatie, het hanteren van zacht voedsel en het manipuleren van vervormbare voorwerpen in huizen en fabrieken. Simpel gezegd demonstreert de studie dat om de wereld even effectief aan te raken als wij, robots niet alleen goede sensoren nodig hebben, maar ook het juiste “lichaam”, de juiste bewegingsgewoonten—en een slimme manier om al die informatie te verweven tot een samenhangend begrip van wat ze voelen.
Bronvermelding: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Trefwoorden: robotische aanraking, elektronische huid, detectie van zachte voorwerpen, tactiele waarneming, belichaamde robotica