Clear Sky Science · nl
GenHand: gegeneraliseerde kinematische retargeting van menselijke grijpen
Robots leren dingen vasthouden zoals wij dat doen
Van het oppakken van een koffiemok tot het draaien van een schroevendraaier: onze handen laten het hanteren van objecten moeiteloos lijken. Robots hebben daarentegen vaak moeite om alledaagse voorwerpen betrouwbaar vast te pakken, vooral wanneer hun grijpers niets weghebben van een menselijke hand. Dit artikel introduceert GenHand, een systeem dat leert van menselijke handbewegingen in gewone beelden en die omzet in stabiele, mensachtige grijpen voor veel verschillende soorten robothanden.
Waarom robothanden meer nodig hebben dan exacte kopieën
Veel huidige teleoperatie- en imitatie-leersystemen proberen de pose van een menselijke hand direct naar een robothand te kopiëren. Ze matchen vingertoplocaties en gewrichtshoeken zo nauwkeurig mogelijk. Dat werkt alleen wanneer de robothand sterk op een menselijke hand lijkt en een vergelijkbaar aantal vingers en gewrichten heeft. Zodra de robotgrijper eenvoudiger is — bijvoorbeeld slechts twee platte vingers — kan de gekopieerde pose geen veilige greep meer opleveren. Deze benaderingen negeren ook grotendeels de vorm van het object en waar stevig contact zou moeten plaatsvinden, waardoor de resulterende grijpen kunnen wegglijden, uit balans raken of nooit goed het oppervlak raken.
Kijken naar hand en object samen
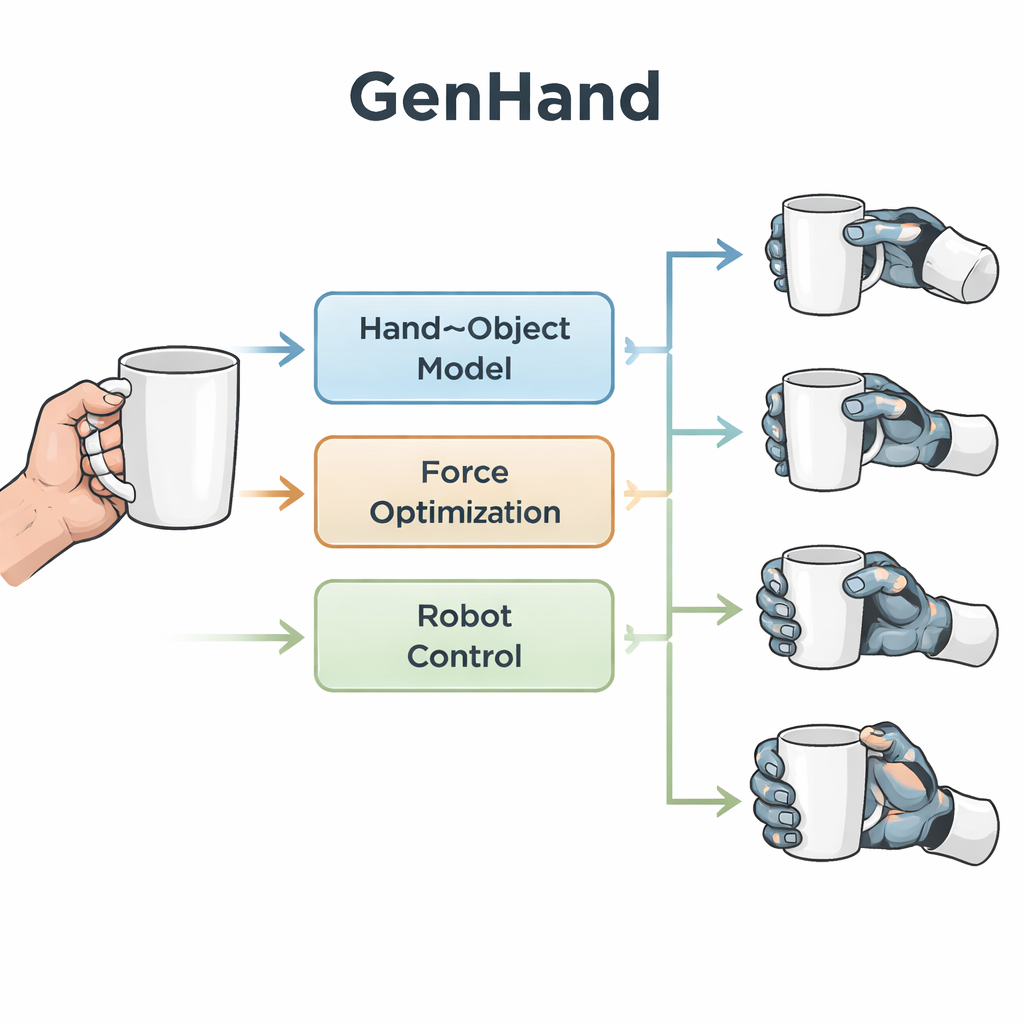
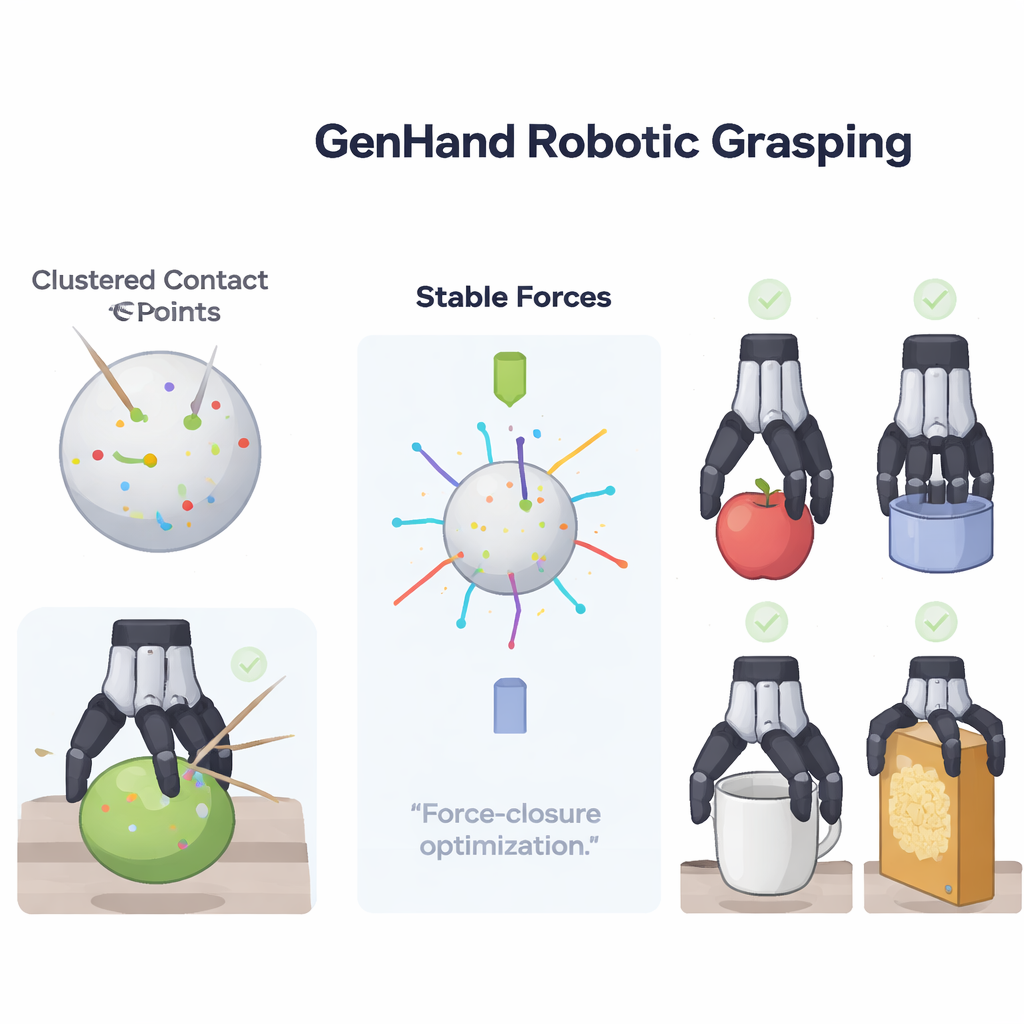
GenHand pakt dit probleem aan door te focussen op de interactie tussen de hand en het object, niet alleen op de handvorm. Startend vanaf een gewone RGB-afbeelding reconstrueert het systeem een gedetailleerd 3D-model van het object en een parametrisch 3D-model van de menselijke hand. Het gebruikt een neuraal netwerk om de handpose af te leiden en een geavanceerde “signed distance”-representatie om het oppervlak van het object te herstellen. Uit dit paar modellen bepaalt GenHand waar de menselijke vingertoppen daadwerkelijk contact maken en met welke richtingen ze op het object drukken. Vervolgens groepeert het deze contactpunten in een klein aantal betekenisvolle regio’s en krachrichtingen die de essentiële structuur van de menselijke greep samenvatten en onnodige details wegfilteren.
De greep voor elke robot heruitvinden
Zodra GenHand de belangrijkste contactregio’s en hoe ze het object ondersteunen begrijpt, bouwt het een nieuwe set “contactankers” die passen bij de specifieke robotgrijper. Voor een eenvoudige tweevoudige grijper kan het slechts twee tegengestelde contactregio’s behouden, zoals een paar duimen die een doos samendrukken. Voor meer behendige handen met drie, vier of vijf vingers kan het extra ankers toewijzen om beter aan het rijke contactpatroon van de menselijke greep te voldoen. Een wiskundige optimalisatiestap zoekt vervolgens naar contactlocaties op het oppervlak van het object die krachten en momenten in alle richtingen in evenwicht kunnen houden, een eigenschap die bekendstaat als force closure. Cruciaal is dat GenHand dicht bij de originele menselijke contacten blijft terwijl het eist dat de resulterende greep fysiek stabiel zou zijn in de echte wereld.
Van stabiele contacten naar echte robotbewegingen
Met stabiele contactankers op hun plek vindt een tweede optimalisatiefase daadwerkelijke gewrichtshoeken en polsbewegingen voor de robot die die ankers kunnen realiseren zonder gewrichtsbeperkingen te overschrijden of botsingen met het object te veroorzaken. Om dit te doen matcht GenHand herhaaldelijk de potentiële contactpunten van de robot met de gewenste ankers, past de pose aan en controleert of onderdelen het object binnendringen. Dit proces wordt toegepast op een reeks robothanden — van een eenvoudige Robotiq-tweevingergrijper tot een sterk gearticuleerde vijfvingerige Shadow-hand — en getest in fysicasimulatie. Vergeleken met een toonaangevende baseline die alleen vingertopgeometrie nabootst, levert GenHand veel minder krachtsonevenwicht, nauwkeuriger oppervlakcontact en aanzienlijk hogere succespercentages bij het optillen en vasthouden van 20 alledaagse objecten onder verschillende wrijvingsomstandigheden.
Waar dit dagelijkse robots naartoe kan brengen
Voor een lekenlezer is de kernboodschap dat GenHand robots een beter gevoel geeft voor het "hoe" van het vasthouden van spullen, niet alleen het "waar" ze hun vingers moeten plaatsen. Door te leren van echte menselijke grijpen en basisregels van fysieke stabiliteit af te dwingen, kan het dezelfde menselijke demonstratie naar zeer verschillende robothanden retargeten terwijl het toch solide, betrouwbare grijpen bereikt. Dit maakt telegeopereerde robots makkelijker te besturen, helpt leersystemen trainen met rijkere voorbeelden en brengt ons dichter bij huishoud- en werksrobots die veilig dezelfde grote verscheidenheid aan objecten kunnen manipuleren als mensen.
Bronvermelding: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
Trefwoorden: robotisch grijpen, teleoperatie, menselijke demonstratie, robothanden, manipulatie