Clear Sky Science · nl
Betaalbare 3D-geprinte miniatuur robotgrijper met geïntegreerde camera voor visiegebaseerde kracht- en koppelmeting
Waarom kleine zachte grijpers ertoe doen
Robots worden kleiner en voeren steeds delicate taken uit, van het monteren van piepkleine tandwielen tot het plukken van rijpe bessen zonder ze te beschadigen. Maar de meeste robothanden knijpen nog steeds min of meer blind, met weinig gevoel voor hoeveel druk ze uitoefenen. Dit artikel beschrijft een goedkope, 3D-geprinte miniatuurgrijper, bijgenaamd de “Seezer”, die zowel fragiele objecten kan vasthouden als ‘voelen’ welke krachten optreden door een kleine camera in de vingertoppen in plaats van dure krachtsensoren te gebruiken.
Een zachte hand die ziet
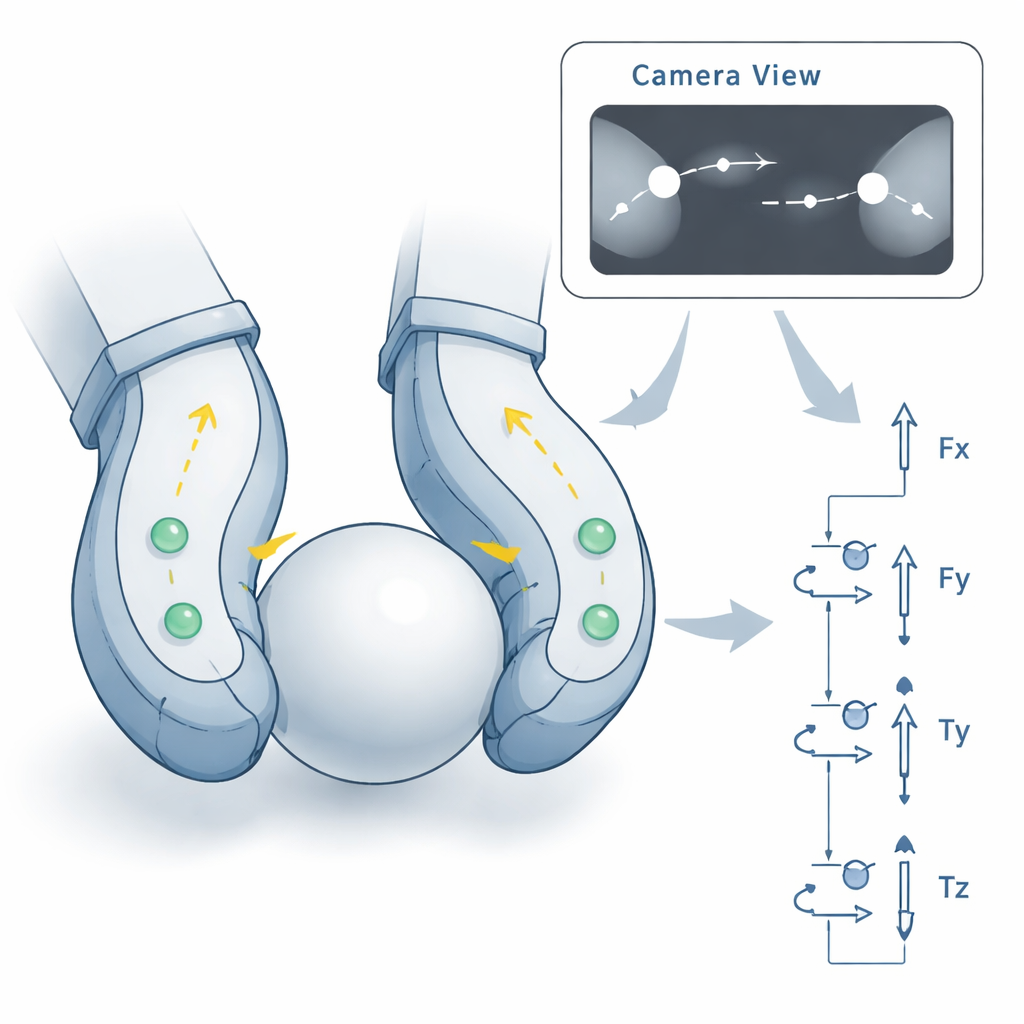
De Seezer is een zachte, compliant robotgrijper waarvan de vingers buigen in plaats van te scharnieren zoals metalen tangen. Het kernidee is om vrijwel alles in één stuk op een consumenten-3D-printer te maken: een monolithisch vingerelement met flexibele gewrichten, vingertopvormen aangepast aan de taak en ingebouwde kleine markeringen. Deze wegwerpfingermodule schuift op een compact motoreiland dat een miniatuurcamera en verlichting huisvest. Als de motor een wormwiel draait, buigen de flexibele gewrichten en sluiten de vingers zich rond een object, terwijl de camera de vingertoppen en de ruimte voor de grijper observeert.

Krachten aflezen uit vingervorming
In plaats van bedrading, rekstrookjes of druksensoren in de vingers te verwerken, voorziet de Seezer de binnenkant van informatierijke visuele aanwijzingen. Elke vingertop draagt kleine ronde ‘fiduciale’ markers waarvan de positie in het camerabeeld verandert zodra de vinger vervormt. Software detecteert en volgt deze markers in elk frame. Vervolgens leren eenvoudige wiskundige modellen, op basis van een korte kalibratieserie, hoe verschuivingen in markerpositie samenhangen met de daadwerkelijke duw- en trektkrachten op elke vingertop. Door de drie vingertopkrachten te combineren met basisfysica schat het systeem de totale krachten en momenten op de grijper in alle zes richtingen, plus de knijpkracht tussen de vingers.
Hoe goed het krachten voelt
Om de nauwkeurigheid van deze cameragebaseerde sensing te evalueren vergeleken de auteurs de Seezer‑schattingen met metingen van een hoogprecisie commercieel kracht-/moment-sensor in een gecontroleerde laboratoriumopstelling. Met een uitvoering van het vingerdetail (stuggere tips) mat de grijper knijpkrachten tot ongeveer 1,1 newton met typische fouten tussen 8% en 17%, en volledige zesassige krachten en momenten met fouten meestal tussen 8% en 24%. Een zachtere vingertipvariant ruilde maximale kracht in voor meer gevoeligheid, waardoor de absolute krachten kleiner waren maar de procentuele fouten vergelijkbaar bleven. Belangrijk is dat de modellen slechts 31 tot 141 kalibratiegegevenspunten nodig hadden—veel minder dan de duizenden beelden die vaak nodig zijn voor deep‑learningmethoden die op volledige cameraframes werken.
Van piepkleine tandwielen tot zachte bessen
Twee demonstratietaken tonen wat deze grijper in de praktijk kan doen. In de ene taak pakte de Seezer herhaaldelijk kleine 3D-geprinte tandwielen van assen, verplaatste ze en zette ze terug, waarbij de interne camera zowel werd gebruikt om de sleutelgroef van het tandwiel met de as uit te lijnen als om vingerbewegingen te monitoren. Dit bootst fijn industrieel assemblagewerk in krappe ruimtes na. In een andere taak oogstte de grijper aalbessen van hun steeltjes. Het systeem volgde in realtime de geschatte knijpkracht en stopte met sluiten zodra een vooraf ingestelde krachtbegrenzing werd bereikt, zodat de bes werd geplukt zonder te worden geplet. Beide voorbeelden draaiden op goedkope elektronica en toonden aan dat één ontwerp zowel stijve als zachte objecten van enkele millimeters kan hanteren.
Uitdagingen en toekomstige toepassingen
De Seezer is nog steeds een proof of concept en kent beperkingen. Het markervolgsysteem werkt het beste in rustige, goed verlichte scènes met onopgemaakte achtergronden; veranderende belichting, glanzende oppervlakken en complexe bewegingen kunnen volgfouten veroorzaken. De beperkte framerate van de camera beperkt ook hoe snel het systeem kan reageren voor strakke krachtsregeling of rijke haptische feedback. De vinger-materialen kunnen vermoeien of van gedrag veranderen bij langdurig gebruik, en het team heeft de prestaties nog niet systematisch over langere periodes getest. De auteurs stellen dat robuustere volgalgoritmen of het combineren van hun hardware met moderne deep‑learning krachtschatters de nauwkeurigheid en betrouwbaarheid kunnen verhogen, terwijl vooruitgang in 3D‑printen verdere miniaturisatie en sterilisatievriendelijke wegwerpfingers voor chirurgische of laboratoriumtoepassingen mogelijk zou maken.
Wat dit betekent voor alledaagse robotica
Simpel gezegd laat dit werk zien dat een kleine, goedkope robothand zowel kan zien als voelen door te observeren hoe zijn eigen zachte vingers buigen. Met slechts beperkte kalibratiegegevens en standaardonderdelen schat de Seezer hoe hard hij knijpt en welke richting contactkrachten en momenten hebben, nauwkeurig genoeg voor zachte hanteertaken. Als de robuustheid verbetert, kan dezelfde benadering toekomstige robots helpen kleine, fragiele voorwerpen—zoals medische hulpmiddelen, elektronica, fruit of zelfs weefsel bij minimaal invasieve chirurgie—te hanteren zonder omvangrijke sensoren of complexe hardware, en zo gevoelig aanraken mogelijk maken waar ruimte en kosten beperkt zijn.
Bronvermelding: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Trefwoorden: zachte robotgrijper, visiegebaseerde krachtsensing, 3D-geprinte robotica, miniatuurbewerking, haptische feedback