Clear Sky Science · nl
Vooruitgang in soft robotics: recente ontwikkelingen in diëlektrische elastomeer- en vloeistofactuatoren
Zachte robots die meer als spieren bewegen
Stel je een robot voor die veilig een kind kan omhelzen, zich door puin in een ingestort gebouw kan wurmen of zacht een falend hart kan masseren. Voor zulke taken moeten machines buigen en rekken zoals levend weefsel dat doet, niet klinken als metaal. Dit overzichtsartikel verklaart hoe een nieuwe klasse van “zachte” elektrische spieren — gemaakt van rubberachtige vaste stoffen en vloeistoffen — die visie dichterbij brengt, en welke uitdagingen er nog zijn voordat ze het lab verlaten en in het dagelijks leven verschijnen.
Van stijve motoren naar zachte elektrische spieren
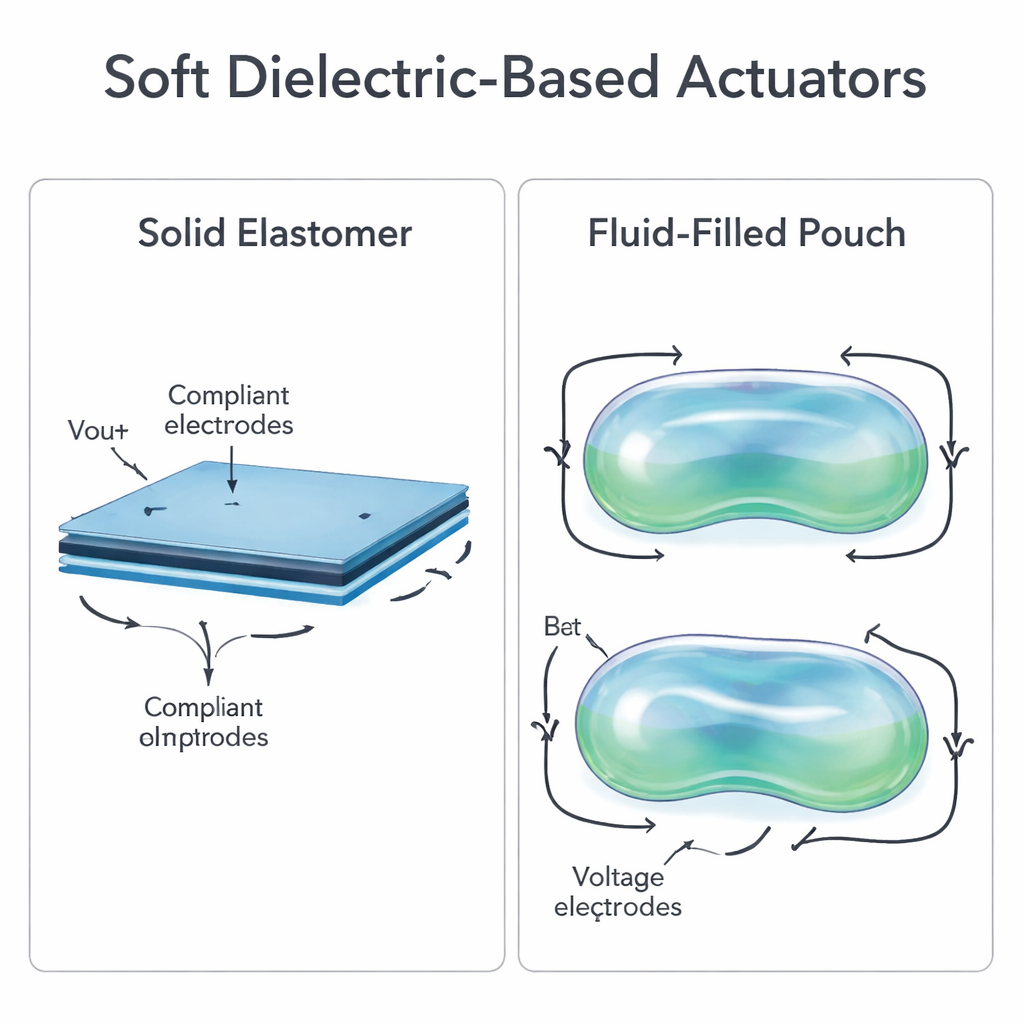
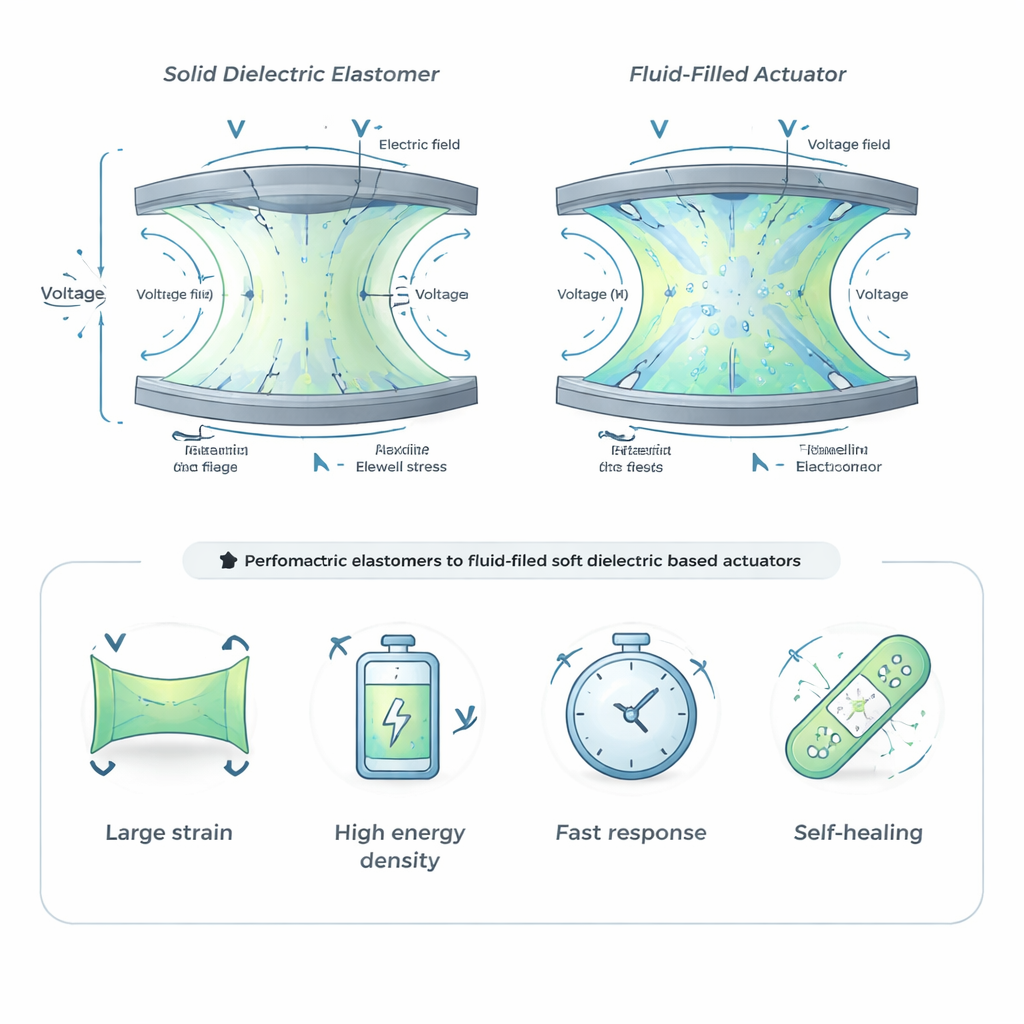
De meeste industriële robots vertrouwen op zware, stijve motoren en tandwielen. Ze zijn krachtig en precies, maar ook duur, kwetsbaar en potentieel gevaarlijk in de buurt van mensen. Zachte robots, gebouwd uit rekbare materialen vergelijkbaar met siliconen bakvormen of elastiekjes, ruilen brute kracht in voor zachtheid, aanpassingsvermogen en veerkracht. De focus van dit artikel ligt op zachte actuatoren die door elektriciteit worden aangestuurd: diëlektrische elastomeeractuatoren (DEA’s), die een vaste rubberlaag gebruiken, en diëlektrische vloeistofactuatoren (DFA’s), die een elektrisch isolerende vloeistof in een flexibele zak bevatten. In beide gevallen knijpt het aanleggen van een spanning tussen twee meegevende elektroden het materiaal samen via elektrostatische krachten en zet het elektrische energie direct om in beweging met grote vervorming, hoge energiedichtheid en snelle respons.
Hoe de materialen spieren laten werken
Om zich als nuttige spieren te gedragen, hebben deze apparaten zeer specifieke materialen nodig. Voor DEA’s moet het centrale rubberblad extreem zacht zijn zodat het makkelijk kan uitrekken, maar ook hoge elektrische velden weerstaan zonder te scheuren of te kortsluiten. Onderzoekers verfijnen dit evenwicht met twee hoofdstrategieën. De ene is het ontwerpen van nieuwe polymeren — van acrylaten, siliconen en polyurethanen tot meer exotische blockcopolymeren — die veel polaire chemische groepen combineren (wat de elektrische respons verhoogt) in flexibele, lage-stijfheidsnetwerken. De andere is het creëren van composieten door kleine deeltjes of vloeistoffen toe te mengen die het vermogen van het materiaal om elektrische energie op te slaan vergroten. Een vergelijkbare denkwijze geldt voor DFA-ontwerp: ingenieurs kiezen oliën en andere diëlektrische vloeistoffen met de juiste viscositeit, stabiliteit en compatibiliteit met dunne plastic of siliconen omhulsels, zodat spanning snel vloeistof kan verplaatsen om bulten, slagen en trillingen te maken zonder lekken of chemische degradatie.
Bouwen en aansturen van zachte actuatoren op schaal
Het omzetten van deze slimme materialen in betrouwbare apparaten is een eigen engineeringuitdaging. Traditionele fabricage omvat vaak arbeidsintensieve handmatige stappen: dunne folies op frames spannen, zachte elektroden schilderen of printen, lagen stapelen en — in het geval van DFA’s — vloeistof injecteren en de zak sluiten. Het artikel bespreekt nieuwere productieroutes zoals inkjet- en zeefdruk, extrusie van vezelachtige spieren en meermateriaal 3D-printen dat elektroden en dielectrica in één keer kan aanleggen. Het legt ook uit hoe verschillende vormen verschillende bewegingen opleveren: platte vlakken die in oppervlakte uitzetten, koepels die omhoog komen, opgerolde cilinders die in lengte samentrekken en structuren die buigen of trillen. Omdat deze materialen kunnen verouderen, lekken of falen door elektrische doorbraak, vatten de auteurs levensduurstudies en veelvoorkomende faalwijzen samen en benadrukken ze de inzet voor zelfherstellende ontwerpen die na een vonk of punctie kunnen herstellen.
Slimmere besturing en opkomende toepassingen
Net als natuurlijke spieren moeten zachte actuatoren worden aangestuurd. Eenvoudige open-loop schema’s geven alleen een spanningspatroon, maar dat kan afdrijven naarmate het materiaal opwarmt of kruipt. Geavanceerdere benaderingen bouwen sensoren in — of gebruiken de elektrische signalen van de actuator zelf — om vervorming, kracht of trilling in realtime te meten en het aandrijfsignaal dienovereenkomstig aan te passen. Onderzoekers experimenteren nu met machine learning- en reinforcement-learning-controllers die kunnen omgaan met het niet-lineaire, geschiedenisafhankelijke gedrag van zachte materialen. Aan de toepassingskant biedt het artikel een breed beeld: kunstspieren die vele malen hun eigen gewicht tillen, vissen- en insectachtige robots die zwemmen of vliegen, draagbare haptische banden en vingertopkussentjes die realistisch tastgevoel geven, zoomlenzen en lichtvormende huiden geïnspireerd op inktvissen en menselijke ogen, vormveranderende oppervlakken en conceptuele medische apparaten die op een dag falende harten of verlamde gezichten zouden kunnen helpen.
Wat nog tussen labdemo’s en echte robots staat
Ondanks alle belofte staan deze elektrische spieren nog steeds voor obstakels voordat ze veilig huishoudhulpjes, medische implantaten of massamarkt wearables kunnen aandrijven. Velen vragen om aandrijfspanningen op kilovolt-niveau, wat veiligheid en elektronica bemoeilijkt. Materialen die in korte tests uitstekend presteren, kunnen na miljoenen cycli stijf worden, uitdrogen of falen. Fabricage is vaak te traag en inconsistent voor grootschalige productie. En de meeste huidige polymeren zijn moeilijk te recyclen of biologisch afbreekbaar. De auteurs betogen dat vooruitgang zal afhangen van co-ontwerp over schalen heen: nieuwe zachte materialen die lage stijfheid, hoge elektrische respons, robuustheid en zelfs zelfherstel combineren; geautomatiseerde, datagedreven fabricage en testen; en besturingssystemen die ingebouwde sensing en lichtgewicht AI benutten. Samen zouden deze vooruitgangen toekomstige robots spieren kunnen geven die niet alleen sterk en snel zijn, maar ook veilig, adaptief en duurzaam.
Bronvermelding: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Trefwoorden: soft robotics, diëlektrische elastomeeractuatoren, diëlektrische vloeistofactuatoren, kunstspieren, haptische interfaces