Clear Sky Science · nl
Modelvoorspellende spelbesturing voor gepersonaliseerde en gerichte interactieve assistentie
Robots die voelen als goede trainingspartners
Stel je een trainingspartner of fysiotherapeut voor die altijd weet wanneer hij moet helpen tillen, wanneer hij je even moet laten worstelen, en hoe krachtig je van plan bent de volgende beweging te maken. Dit artikel laat zien hoe contactrobots — zoals exoskeletten die in revalidatie of fabrieken worden gebruikt — een vergelijkbaar soort intuïtie kunnen krijgen. Door wiskundig te "raden" wat een persoon van plan is te doen in de komende seconde of twee, kan de robot de inspanning soepel delen, vermoeidheid verminderen en subtiel sturen hoe mensen bewegen en leren.
Waarom het delen van inspanning met robots moeilijk is
Wanneer een robot fysiek met een persoon verbonden is — en helpt bij het bewegen van een ledemaat of het dragen van een zwaar voorwerp — duwen en reageren beide continu op elkaar. Traditionele robotcontrollers negeren grotendeels wat de mens van plan is; ze jagen gewoon prestatiedoelen na zoals nauwkeurigheid of energiebesparing. Daardoor kan de robot óf te stijf en bazig worden, óf te passief en weinig behulpzaam. Echte menselijke partners doen het beter: zij voelen aan hoe de ander beweegt, passen zich aan iemands mogelijkheden aan en stimuleren uiteenlopende gedragingen, van ontspannen tot intensieve inspanning. De auteurs betogen dat om robots dichter bij dit soort interactie te brengen, de robot expliciet moet modelleren hoe de mens bewegingen plant en hoeveel inspanning die bereid is te investeren.
Een speltheoretische kijk op mens–robotinteractie
De onderzoekers bouwen voort op speltheorie — de wiskunde van strategische interactie — en behandelen de mens en de robot als twee "spelers" die dezelfde taak delen. Elk heeft eigen doelen: de mens wil de gewenste beweging volgen terwijl hij zo min mogelijk inspanning levert, en de robot wil helpen de beweging te volgen en tegelijkertijd de inspanning van de persoon verminderen. Cruciaal is dat van beide wordt aangenomen dat ze slechts kort vooruitkijken, over een eindig planningsvenster van ongeveer één tot twee seconden, wat weerspiegelt hoe mensen van nature bewegingen plannen. Binnen dit venster leiden de onderzoekers een compacte formule af voor een Nash-evenwicht: een gebalanceerd patroon van krachten waarbij noch de mens noch de robot hun resultaat kan verbeteren zonder dat de ander ook verandert. Dit evenwicht bepaalt hoeveel ieder op elk moment zou moeten duwen.
De robot leren menselijke intentie te lezen
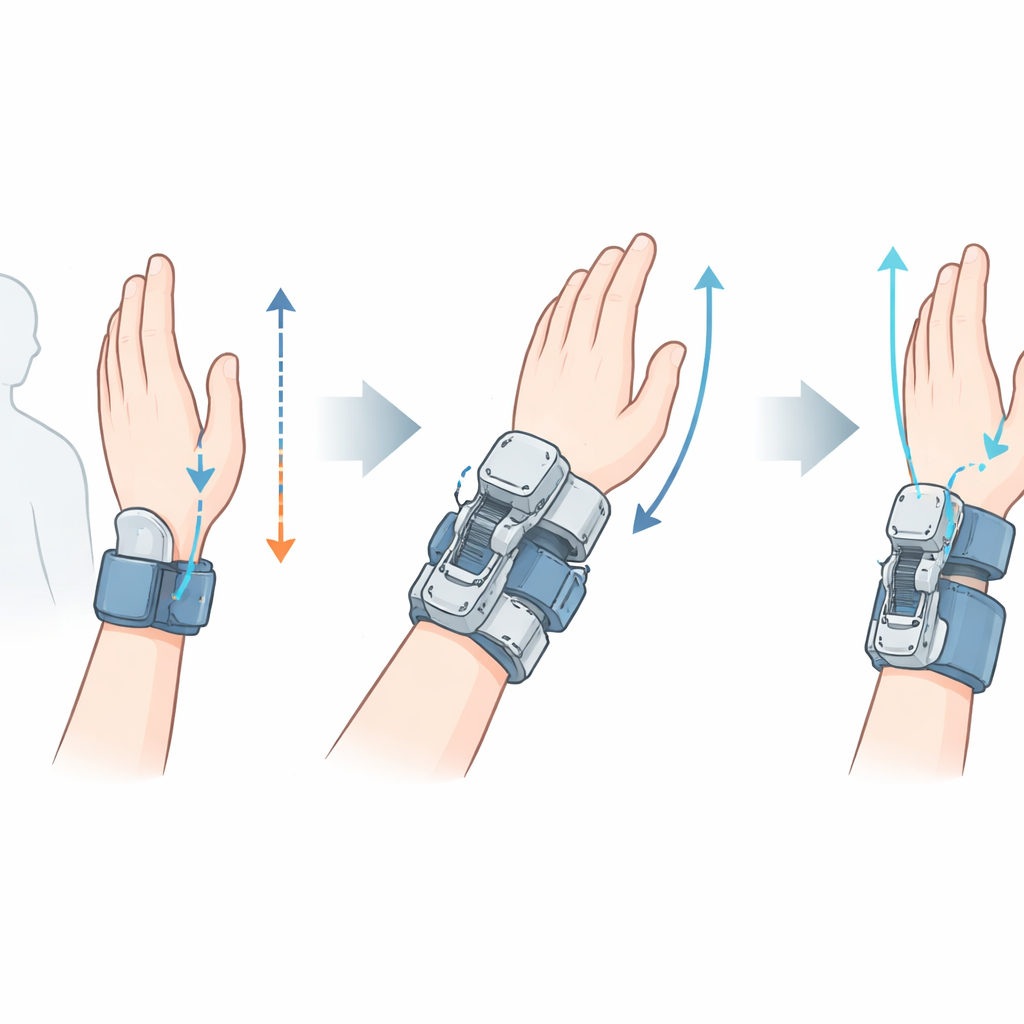
Om dit "bewegingsspel" te spelen, moet de robot eerst afleiden hoe sterk de mens nauwkeurigheid waardeert ten opzichte van inspanning — een verborgen voorkeur die per persoon en zelfs in de tijd varieert. De auteurs lossen dit op met een inverse-spelmethode. Terwijl de persoon beweegt, meten sensoren hun gewrichtshoek en het door hen geproduceerde koppel. De controller zoekt vervolgens herhaaldelijk naar de set menselijke voorkeuren die het beste de recente geschiedenis van beweging en krachten zou verklaren. Met die voorkeuren voorspelt hij hoe de mens waarschijnlijk zal handelen in de volgende korte horizon en berekent hij de optimale ondersteunende kracht van de robot. Dit alles draait in realtime op een pols-exoskelet dat proefpersonen helpt een bewegend doel met hun hand te volgen.
Mensen en robots leren coördineren
Het team testte hun controller met dertig gezonde volwassenen in drie experimenten. In het eerste experiment kregen mensen de opdracht af te wisselen tussen actief het doel volgen en passief blijven. De controller paste zijn interne inschatting van hoeveel de persoon om nauwkeurigheid gaf snel aan: hij steeg tijdens actieve fasen en daalde bijna naar nul wanneer ze ontspanden. In het tweede experiment wisselden deelnemers tussen proefrondes met en zonder robotassistentie. Met de nieuwe controller verminderde de robot de gewrichtsinspanning en spieractiviteit van de mens, terwijl de volgprecisie verbeterde. Over herhaalde trials stabiliseerde het interactiepatroon van elk persoon in een individueel "evenwicht," en nam de correlatie tussen menselijke en robotkrachten toe — bewijs van groeiend wederzijds begrip. In het derde experiment introduceerden de onderzoekers één hulpknop, een meta-parameter die verschuift hoe sterk de robot probeert de inspanning van de persoon te minimaliseren. Het verdraaien van deze knop veranderde op geleidelijke wijze hoeveel inspanning mensen kozen bij te dragen, zonder dat de taakprestatie eronder leed.
Gedrag sturen met één draaiknop
De hulp-meta-parameter stelt ontwerpers in staat een spectrum van interactiestijlen te bestrijken met één regelaar: van vrijwel geen hulp, via gelijk delen van de inspanning, tot bijna volledige ondersteuning waarin de robot leidt en de mens kan ontspannen. Bij tussenliggende instellingen coördineerden mensen het beste met de robot, waarbij ieder ongeveer de helft van de last droeg. Het patroon van afgeleide menselijke voorkeuren bleef voor elke persoon consistent over verschillende assistentieniveaus — behalve wanneer de robot bijna alles deed; dan werden gedragingen homogener omdat mensen grotendeels stopten met actief meedoen. Dit toont aan dat de robot zowel individuele controletijlen kan blootleggen als ze subtiel kan bijsturen, bijvoorbeeld door gebruikers in één fase van de training meer te laten doen en in een andere fase minder.
Wat dit betekent voor revalidatie en werk
Voor niet-specialisten is de kernboodschap dat deze controller robots meer als slimme partners laat handelen dan als stijve machines. Door te voorspellen hoe we van plan zijn te bewegen en hoeveel ze helpen aan te passen, kunnen robots onze inspanning verminderen wanneer dat nodig is, ons aansporen meer te werken wanneer dat nuttig is, en bewegingen nauwkeurig en stabiel houden. Hetzelfde wiskundige kader kan worden afgestemd voor revalidatie — waarbij geleidelijk de inspanning verschuift van robot naar patiënt — of voor samenwerkende productie, waar mensen en robots lasten veilig en efficiënt delen. In wezen laat de studie zien dat mensen zich van nature aanpassen aan een robot die "hetzelfde spel" speelt als zij, wat de deur opent naar meer gepersonaliseerde, gerichte vormen van interactieve assistentie.
Bronvermelding: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Trefwoorden: mens-robotinteractie, exoskeletassistentie, speltheoretische besturing, motorische revalidatie, gedeelde besturing