Clear Sky Science · nl
Door synthetische röntgenbeelden aangestuurde tracking en controle van miniatuurlijke medische apparaten
Kleinere instrumenten, veiligere operaties
Chirurgen beginnen tiny, draadloze medische hulpmiddelen te gebruiken die door bloedvaten en andere nauwe doorgangen kunnen kruipen om medicijnen toe te dienen, verstopte slagaders te openen of vitale signalen diep in het lichaam te meten. Deze miniatuurlijke medische apparaten beloven minder ingrijpende procedures en sneller herstel — maar alleen als artsen ze in realtime veilig kunnen zien en sturen. Dit artikel introduceert MicroSyn-X, een nieuwe methode om computers te trainen zodat ze deze kleine apparaten op röntgenbeelden volgen, wat de weg vrijmaakt voor preciezere en minder invasieve operaties.
Het probleem met onzichtbare hulpjes
De huidige ruggengraat van chirurgische beeldvorming is röntgenfluoroscopie, die bewegende schaduwen van botten, vaten en instrumenten op een scherm toont. Miniatuurapparaten zijn echter zo klein en zwak dat ze vaak in de ruisende achtergrond vervagen. Ze kunnen verborgen raken achter bot, metalen instrumenten of contrastmiddelen, en zachte of vloeibare robots veranderen voortdurend van vorm terwijl ze bewegen. Mensen moeten het scherm zorgvuldig volgen en magneten of katheters met de hand bijstellen — een traag en vermoeiend proces dat fouten in de hand werkt. Computer vision — software die zelfstandig kan “zien” — zou kunnen helpen, maar heeft meestal enorme verzamelingen zorgvuldig gelabelde beelden nodig. Voor deze nieuwe apparaten bestaan zulke datasets nauwelijks, omdat het verzamelen ervan kostbaar, tijdrovend en beperkt door patiëntprivacy is.
Computers leren met nep‑ maar geloofwaardige röntgenbeelden
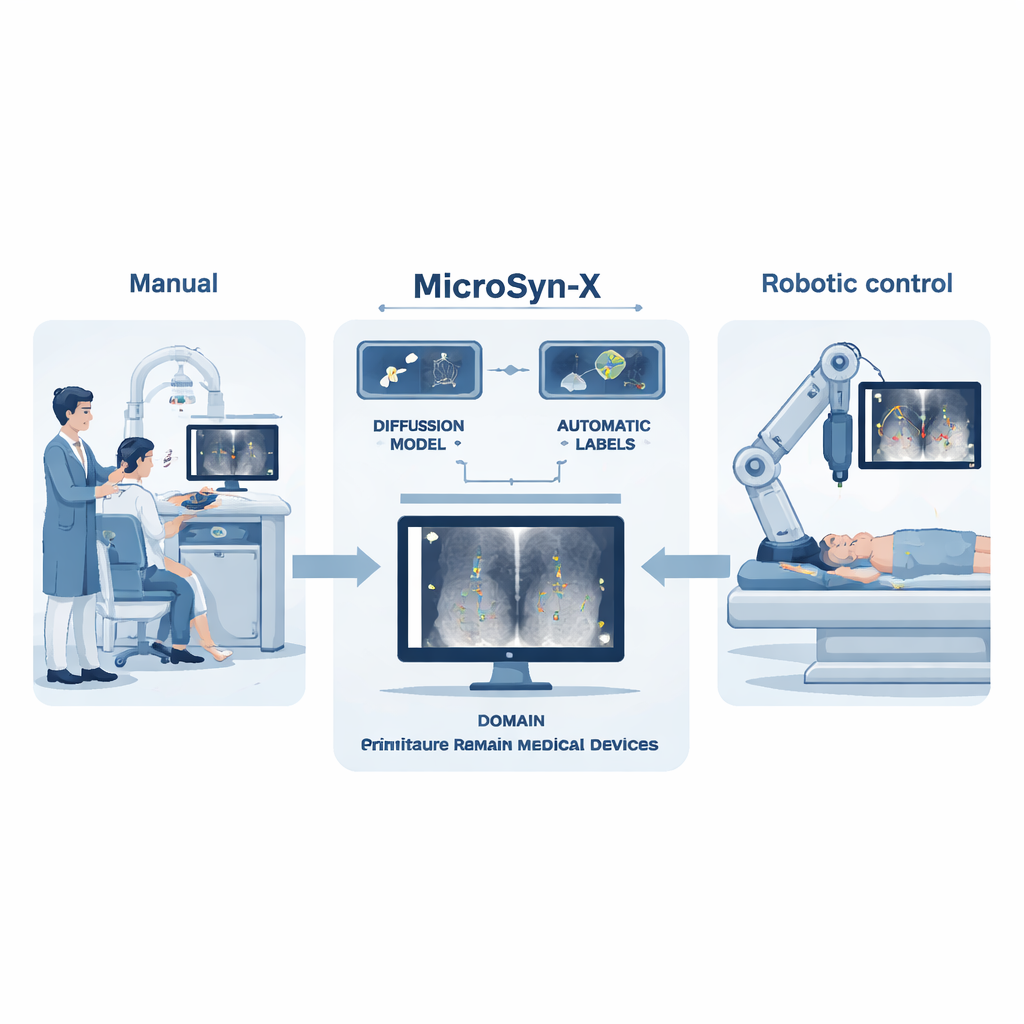
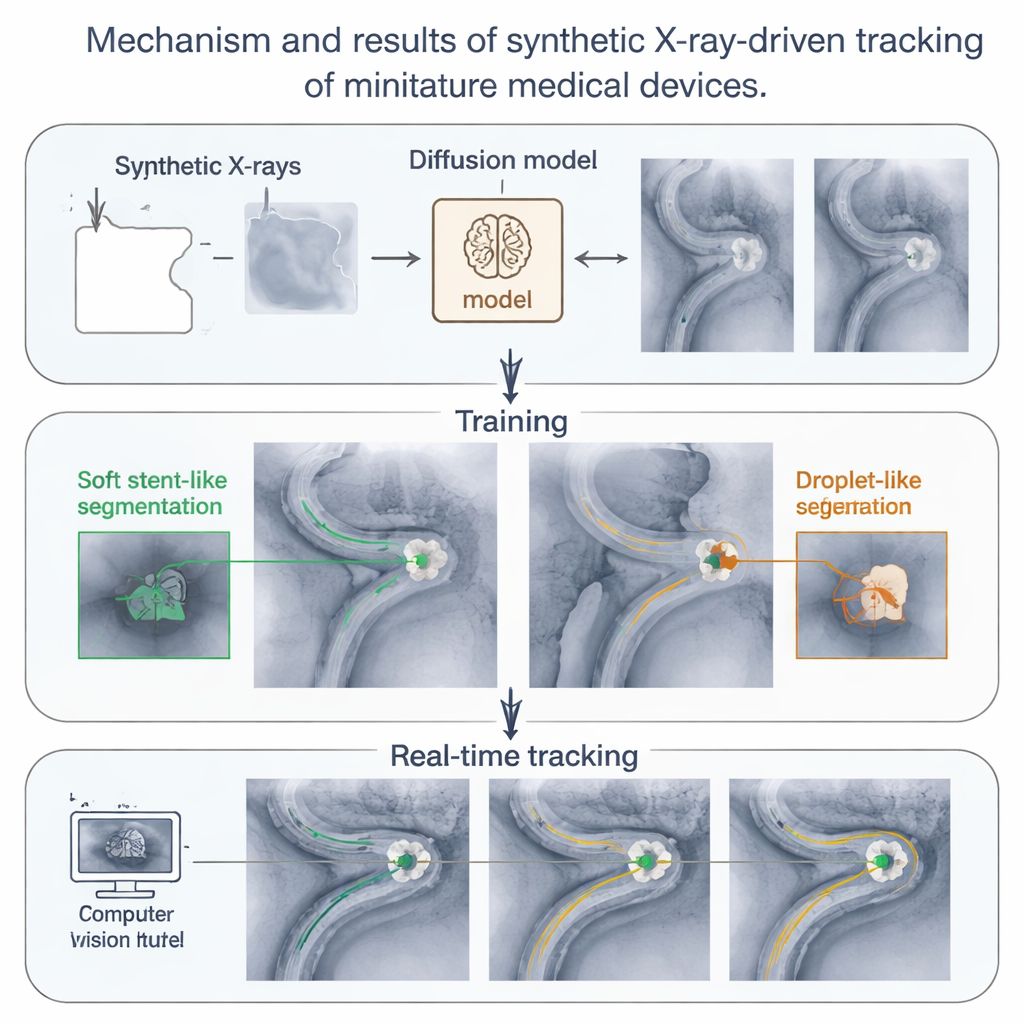
MicroSyn-X pakt dit dataprobleem aan door zeer realistische röntgenbeelden te genereren met ingebouwde labels die een leeralgoritme precies vertellen waar elk apparaat zich bevindt. Eerst gebruikt het systeem een moderne afbeeldingsgenerator, een diffusiemodel, om levensechte röntgenachtergronden van organen, botten en chirurgische instrumenten te produceren, gestuurd door eenvoudige prompts en ruwe maskers die weefsels, metaal en met vloeistof gevulde kanalen omlijnen. Vervolgens worden afbeeldingen van de miniatuurlijke apparaten — ofwel eenmaal gefotografeerd op een neutrale achtergrond of wiskundig weergegeven voor vloeistofdruppels — digitaal in deze scènes gemengd zodat ze eruitzien alsof ze daadwerkelijk in het lichaam zitten. Omdat de computer exact weet waar elk apparaat is geplaatst, genereert het automatisch precieze omtrekken en begrenzingsvakken, hetgeen het omslachtige handmatig labelen overbodig maakt.
Voorbereiden op de echte wereld met gecontroleerde chaos
Een belangrijke innovatie van MicroSyn-X is “domeinrandomisatie”, een bewuste injectie van variatie in de synthetische beelden. Het systeem verandert automatisch orgaanvormen, apparaatposities, helderheid, ruisniveau en zelfs de mate waarin apparaten worden verborgen door botten of instrumenten. Het creëert ook veel verschillende vormen voor vloeibare robots, die kunnen uitrekken, in zwermen uiteen kunnen vallen en weer samensmelten. Door het leeralgoritme met duizenden licht verschillende situaties te confronteren — veel daarvan zeldzaam of onpraktisch om bij echte patiënten vast te leggen — trainen de auteurs modellen die zich richten op de essentiële visuele signalen van de apparaten in plaats van op oppervlakkige patronen. Tests tonen aan dat modellen die uitsluitend op deze synthetische beelden zijn getraind, kunnen tippen aan of zelfs beter presteren dan modellen die op echte röntgenbeelden zijn getraind, vooral in lastige gevallen met laag contrast, veel ruis of sterke occlusie.
Van computerscherm naar robot in de operatiekamer
De onderzoekers beperken zich niet tot softwaredemo’s en koppelen MicroSyn-X rechtstreeks aan een robotsysteem. Een robotarm houdt een sterke magneet nabij weefsel terwijl een C‑arm fluoroscoop röntgenbeelden vastlegt. Het met MicroSyn-X getrainde visiemodel vindt zachte, stent‑achtige robots en vloeibare druppels in elk frame, en een trackingalgoritme verbindt deze detecties tot vloeiende paden, zelfs wanneer de apparaten tijdelijk achter bot verdwijnen. Met deze feedback leidt de robot apparaten door kronkelende kunstvaten, echte dierlijke organen buiten het lichaam en levende slagaders in konijnen en ratten. Het systeem stuurt met succes meerdere apparaten tegelijk, volgt ze door vertakkende vaten en houdt zwermen vloeibare druppels in de gaten die onder magnetische controle splitsen en samensmelten — allemaal in realtime onder uitdagende beeldvormingscondities.
Naar slimmer, minder invasieve zorg
In eenvoudige bewoordingen toont dit werk aan dat computers kunnen leren kleine chirurgische instrumenten veilig in het lichaam te volgen door te oefenen op uitgebreide bibliotheken van zorgvuldig vervaardigde “nep” röntgenbeelden in plaats van op schaars echt materiaal. MicroSyn-X maakt van synthetische beeldvorming een praktische motor voor robotica: het creëert realistische trainingsdata, leert visiemodellen en voedt hun output naar een magnetisch navigatiesysteem dat al succesvol werkte in levende dieren. Naarmate deze methoden rijpen en in complexere gevallen worden getest, kunnen ze chirurgen helpen delicate procedures met grotere nauwkeurigheid en minder belasting uit te voeren, en ons dichterbij een toekomst brengen waarin legers van miniatuurrobots van binnenuit de behandeling stilletjes verbeteren.
Bronvermelding: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Trefwoorden: miniatuur medische apparaten, röntgenbeeldvorming, synthetische data, medische robotica, computer vision