Clear Sky Science · nl
Geneste interactienetwerk verbetert reactievermogen in collectief gedrag
Waarom dierengroepen zo scherp synchroon blijven
Grote groepen dieren lijken vaak te draaien, ontwijken of weg te schieten alsof ze één organisme vormen. Dit artikel onderzoekt hoe de verborgen "wie-volgt-wie" structuur binnen een groep vissen — en binnen door hen geïnspireerde robotzwermen — het hele gezelschap in staat stelt snel en betrouwbaar te reageren wanneer de omstandigheden veranderen.
Laagjes van sturing binnen een bewegende menigte
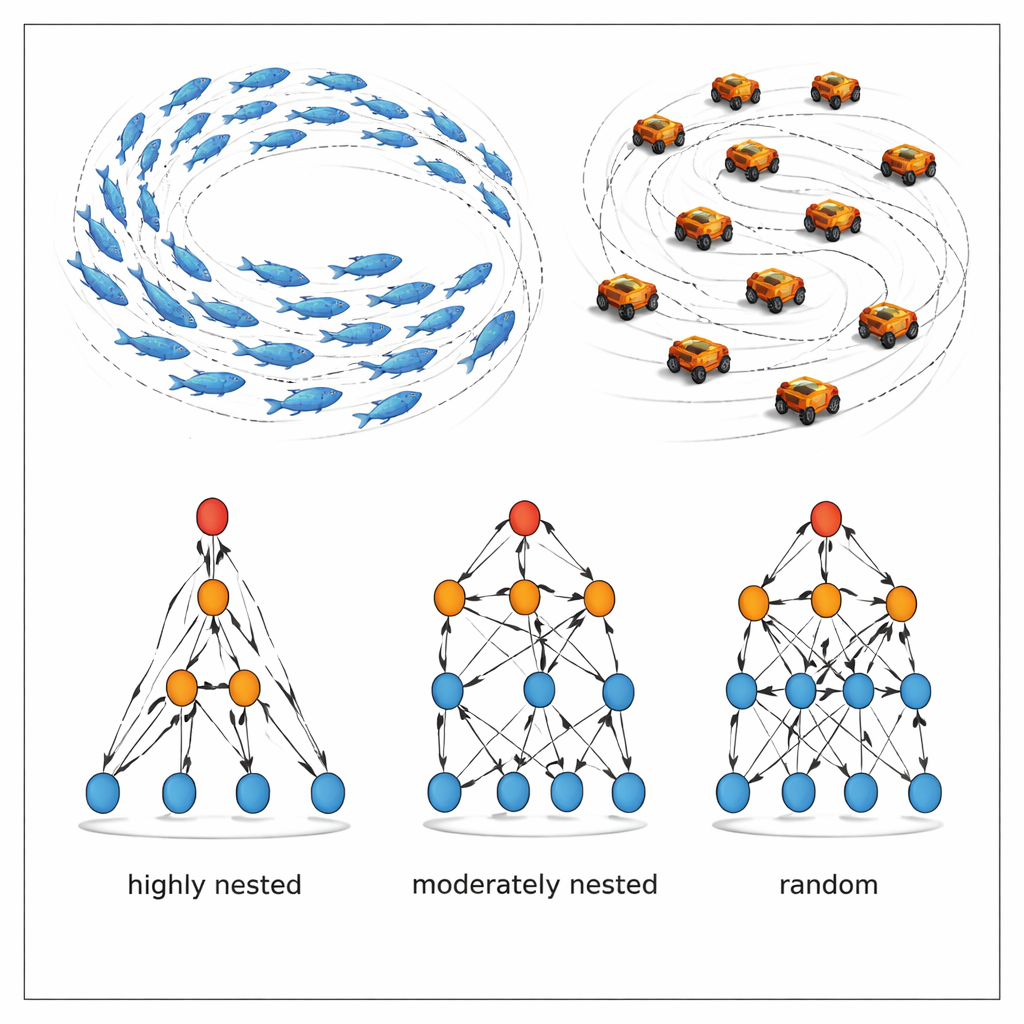
Als we een school vissen zien wegzwermen bij gevaar, denken we al snel dat elke vis gewoon tegelijkertijd zijn buren kopieert. De auteurs tonen aan dat de werkelijkheid subtieler is: er bestaat een onzichtbaar patroon van sturing waarbij sommige vissen veel anderen beïnvloeden en andere vooral volgen. Dit patroon is geen starre pikorde, maar een flexibel web van leider‑volger‑verbindingen dat verandert met het soort beweging dat de groep uitvoert. De belangrijkste structurele eigenschap waarop de onderzoekers zich richten heet "genestheid": leiders op hogere niveaus sturen niet alleen hun directe volgers aan, maar beïnvloeden indirect ook veel lagerniveauvissen verder omlaag in de keten.
Wat visscholen onthullen over snelle manoeuvres
Het team filmde kleine scholen rummy‑nose tetra’s die in een ondiepe cirkelvormige bak zwommen en volgde de positie en oriëntatie van elke vis in de tijd. Uit deze trajecten reconstrueren ze wie er doorgaans eerst bewoog en wie later reageerde, en bouwden ze voor elke groep een gericht netwerk van invloed. Ze maten ook hoe scherp de school draaide (kromming) en hoe strak de vissen gealigneerd waren (polarizatie). Ze vonden dat wanneer de groep snelle, kronkelige manoeuvres uitvoerde met frequente koersveranderingen, het onderliggende netwerk sterk genest was: een paar vissen beïnvloedden velen en het patroon van invloed leek op een nette driehoekige cascade. Daarentegen, wanneer de school rustig in één richting gleed, was het netwerk minder genest en meer egalitair, hoewel de vissen goed uitgelijnd bleven.
Informatieflow testen in geïdealiseerde netwerken
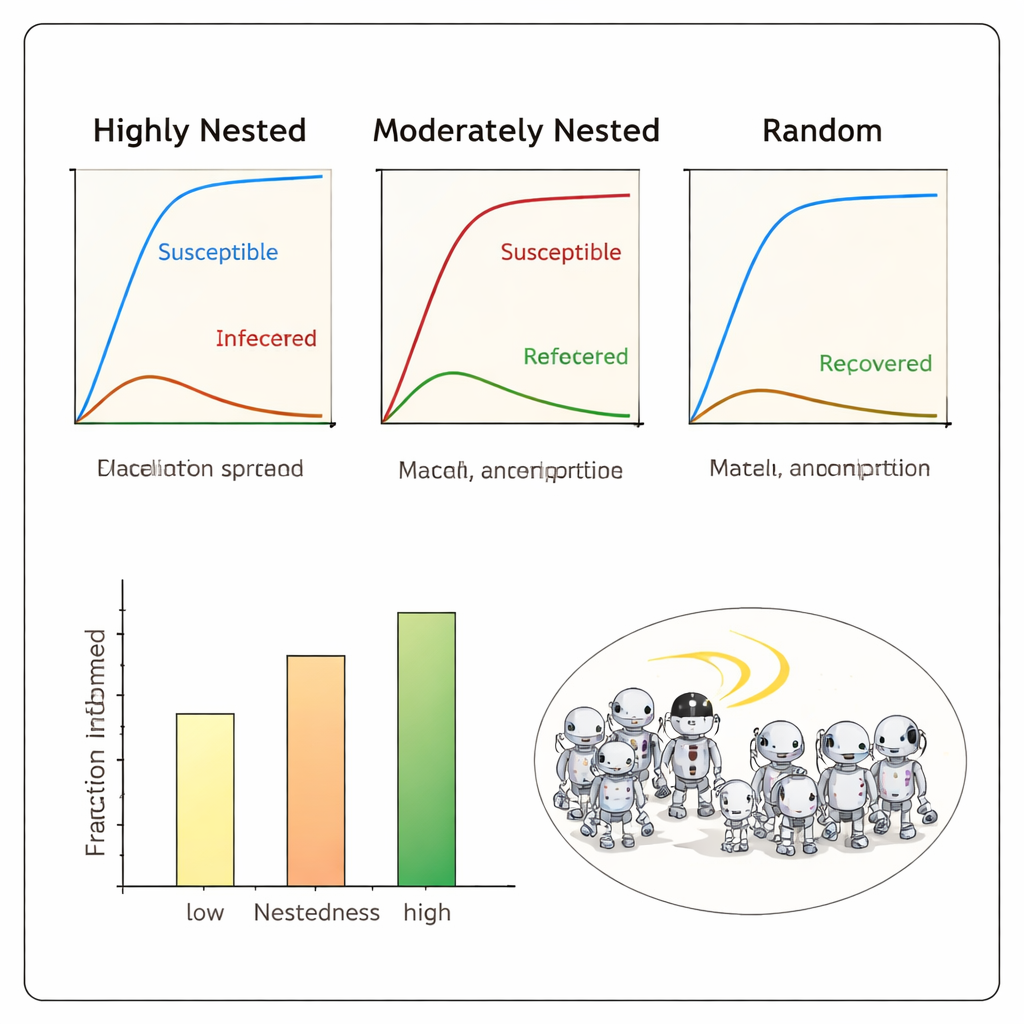
Om te begrijpen waarom geneste structuren nuttig kunnen zijn, gingen de auteurs naar een eenvoudig verspreidingsmodel dat vaak bij epidemieën wordt gebruikt. Hier betekent een knoop "geïnfecteerd" worden dat deze een richtinggevende cue heeft opgepikt en doorgeeft, niet een ziekte. Ze vergeleken perfect geneste leider‑volger‑netwerken met deels geneste en willekeurige netwerken, waarbij het totale aantal verbindingen constant bleef. In het meest geneste geval bereikte een signaal dat bovenaan werd ingevoerd snel bijna elke knoop, zelfs wanneer knopen relatief snel herstelden (staken met doorgeven). Naarmate het netwerk werd gerandomiseerd en de genestheid afnam, stokte het signaal: veel knopen bleven oningelicht, het maximale aantal actieve zenders daalde, en het model had veel meer initiële signalen nodig om dezelfde dekking te behalen.
Van vergelijkingen naar draaiende robotmenigten
De studie vroeg vervolgens of deze structurele voordelen zich vertaalden naar daadwerkelijke beweging. De auteurs bouwden een "zelfaangedreven" zwermmodel waarin elk individu kiest wie te volgen op basis van hoe opvallend de beweging van een buur lijkt, maar met een twist: de regel bouwt bij voorkeur een geneste hiërarchie op, waarbij meer "saliente" bewegingen leiders maakt voor velen. Ze vergeleken dit perfect geneste schema met twee gangbare alternatieven: een waarin elke buur gelijke invloed heeft, en een andere waarin invloeden vloeiend worden gewogen op basis van bewegingscues. In gesimuleerde groepen die herhaalde, grote bochten moesten uitvoeren die werden aangestuurd door een paar geïnformeerde individuen, stelde het geneste schema de menigte in staat het doelrichtingpatroon nauwer te volgen en met kleinere vertragingen, zelfs wanneer aanzienlijke ruis aan de beweging werd toegevoegd.
Reële robots gedragen zich als scholen vissen
Tot slot implementeerden de onderzoekers hun genest‑netwerksturing op vijftig kleine wielenrobots die zich in een vlakke arena bewogen. In een "hover"‑taak probeerde één geïnformeerde robot de groep in een cirkel rondom een gebied te houden. Met een conventionele gewogen‑buurregel was het pad van de zwerm vloeiend en traag, met alleen zachte bochten. Met de geneste regel voerden de robots scherpere, beslissender bochten uit en volgden ze de koersveranderingen van de geïnformeerde robot nauwkeurig. In een "volgen"‑taak, waarbij een geïnformeerde robot onvoorspelbare koersverschuivingen maakte, bleef de genest‑gestuurde zwerm opnieuw dichter bij zowel positie als oriëntatie, terwijl de vergelijkingszwerm veel bochten verzachte of miste.
Waarom dit verder gaat dan vissen en robots
In gewone bewoordingen laat het werk zien dat hoe een menigte bekabeld is net zo belangrijk is als hoe gevoelig haar leden zijn. Een sterk genest web van invloed — een gelaagde keten waarbij leiders op hogere niveaus velen bereiken — laat groepen sneller en betrouwbaarder reageren op belangrijke signalen, zonder overspoeld te worden door ruis. Deze inzichten kunnen biologen helpen dierlijke zwermen te interpreteren, de ontwerprichtlijnen van drone‑ of onderwaterrobotteams sturen die snel moeten reageren in risicovolle omgevingen, en zelfs informeren hoe we menselijke netwerken organiseren wanneer snelle, gecoördineerde actie cruciaal is.
Bronvermelding: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Trefwoorden: collectief gedrag, vissen in scholen, zwermrobotica, informatietransfer, netwerkhiërarchie