Clear Sky Science · nl
Locomotie zet contextafhankelijke motorische strategieën in voor hoofdstabilisatie bij primaten
Waarom een stabiel hoofd belangrijk is tijdens beweging
Elke keer dat je loopt, werkt je hersenen achter de schermen om je hoofd opvallend stil te houden. Die stabiliteit is cruciaal: een stabiel hoofd helpt je ogen en je binnenoren om de wereld te interpreteren, zodat je scherp kunt zien en je evenwicht kunt bewaren. Deze studie bij rhesusapen stelt een ogenschijnlijk eenvoudige vraag met grote implicaties voor neurowetenschap, revalidatie en zelfs robotica: gebruikt de hersenen altijd hetzelfde "standaard" patroon van spieractiviteit om het hoofd te stabiliseren, of schakelt het van strategie afhankelijk van hoe en waar we bewegen?
Wandelen testen in verschillende alledaagse situaties
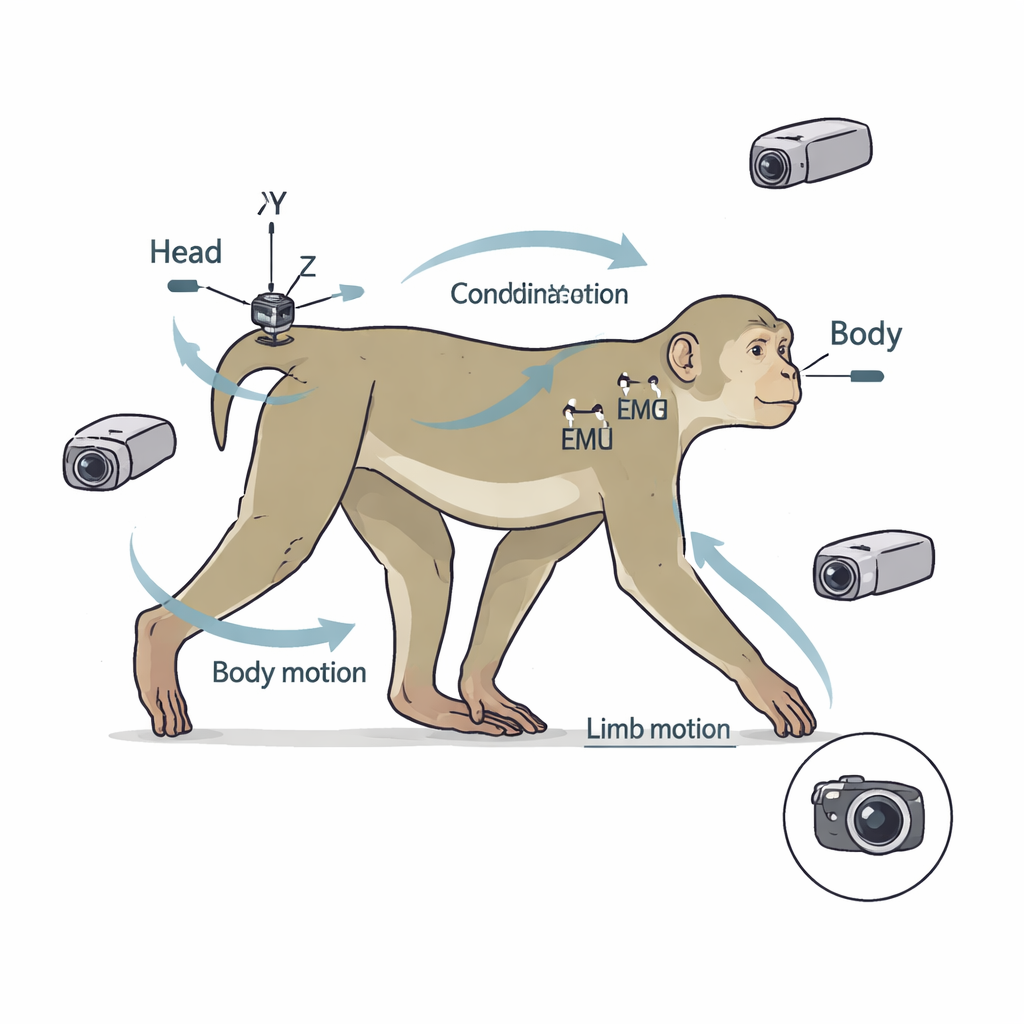
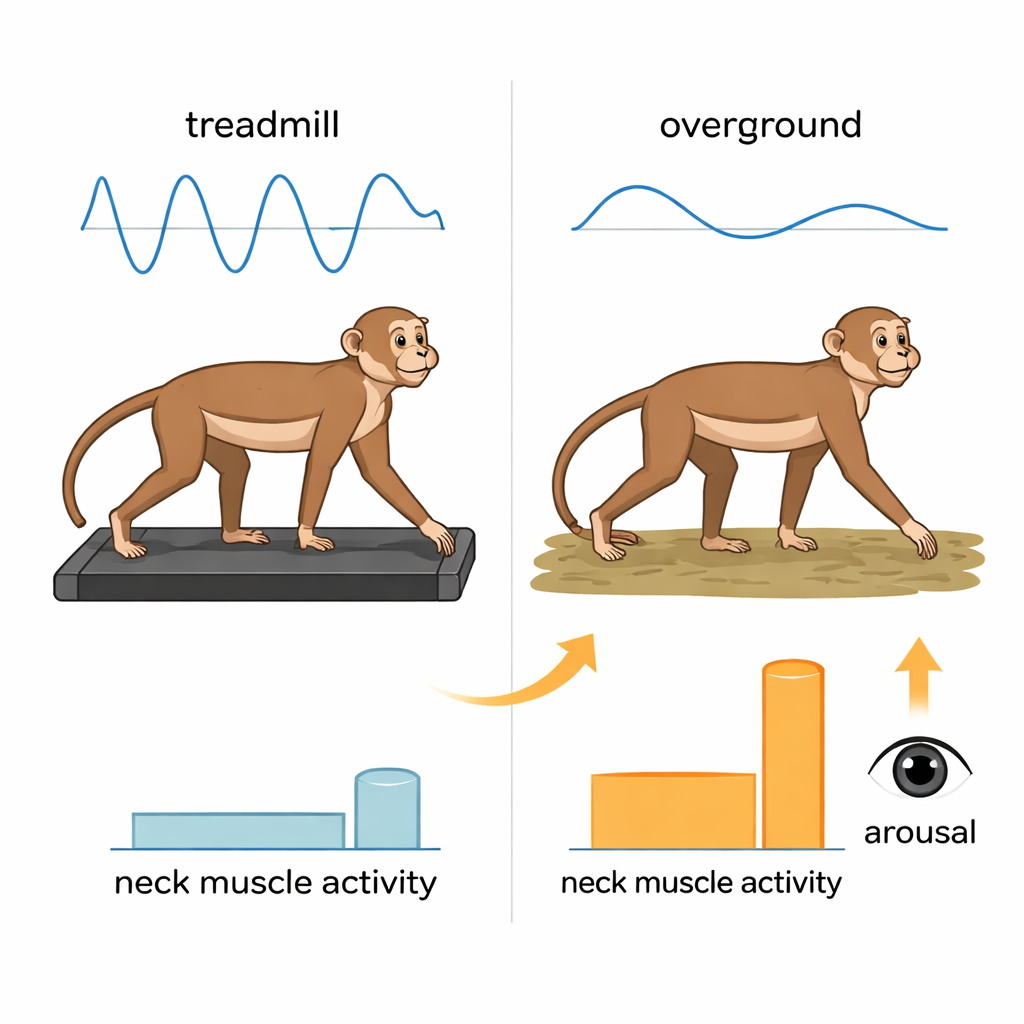
De onderzoekers trainden apen om te lopen in drie belangrijke situaties die bekende menselijke ervaringen weerspiegelen. In de ene liepen de dieren op een gemotoriseerde loopband, waarbij de bandsnelheid nauwkeurig werd gecontroleerd over een reeks snelheden. In een andere liepen ze over de grond langs een rechte baan op hun eigen, natuurlijke tempo. In een derde situatie was er een tweede, vriendelijke aap in de buurt, wat een licht opwindende sociale setting creëerde die het opwakingsniveau van de lopende aap verhoogde — dit volgde het team door de pupilgrootte te meten. Terwijl de apen liepen, verzamelden de wetenschappers gedetailleerde metingen: driedimensionale beweging van ledematen, lichaam en hoofd; kleine elektrische signalen van nekspieren die het hoofd bewegen en stabiliseren; en de krachten en versnellingen die op het hoofd werken.
Het hoofd stilhouden op bewegende lichamen
In alle omstandigheden slaagden de apen erin hun hoofd opvallend stabiel in de ruimte te houden, zelfs terwijl de rest van het lichaam ritmisch bewoog. Op de loopband veroorzaakten snellere bandsnelheden grotere krachten en grotere hoofd-snelheden en -versnellingen, maar de zijwaartse en op‑en‑neer verplaatsingen van het hoofd bleven klein en veranderden vaak weinig met de snelheid. De nek, die als een ingebouwde stabilisator fungeert, gebruikte hoofd‑op‑lichaambewegingen om de lichaamsbeweging tegen te werken. In sommige richtingen, vooral bij rolbewegingen van het hoofd, was deze compensatie bijna perfect: het hoofd bewoog bijna precies tegengesteld aan het lichaam en maakte veel van de beweging ongedaan. In andere richtingen, zoals bij kanteling (pitch) en verticale beweging, was de compensatie slechts gedeeltelijk en schoot soms door, wat de beperkingen van de nekmechanica weerspiegelt.
Zelfgekozen tempo vereist een ander motorisch plan
Wanneer dezelfde apen over de grond liepen op een snelheid die overeenkwam met die van de loopband, verbeterde hun hoofdstabilisatie eigenlijk. Hoofdrotaties en versnellingen waren over het algemeen kleiner, met name in de op‑en‑neer en kantelrichtingen. Deze betere prestatie kwam echter niet voort uit het simpelweg "harder zetten" van dezelfde controlemethode. Opnames van belangrijke nekspieren lieten zien dat de spieractiviteit sterker was en eerder in de stapcyclus begon tijdens overgrondlopen, zelfs vergeleken met de hoogste loopbandsnelheid. Om dieper te graven gebruikten de auteurs wiskundige hulpmiddelen die kijken naar patronen over alle opgenomen spieren tegelijk. Op de loopband schaaldeden deze populatiepatronen vloeiend met snelheid: sneller lopen rekende hetzelfde basislusje van activiteit in de tijd en intensiteit uit zonder de vorm te veranderen. Overgrondlopen produceerde daarentegen een duidelijk ander patroon in deze laag-dimensionale ruimte, wat aangeeft dat de hersenen herorganiseerden hoe nekspieren samenwerkten in plaats van gewoon hetzelfde patroon harder te laten werken.
Opwinding verhoogt inspanning, niet het basale patroon
De sociale conditie, waarin een soortgenoot aanwezig was en de pupillen van de lopende aap vergroot waren, bood een proef van de interne toestand. Bij verhoogde arousal werd de hoofdbeweging nog stabieler en verbeterden de compenserende hoofd‑op‑lichaambewegingen. Nekspieren vuren sterker, maar hun timing binnen de stap en hun algemene coördinatiepatroon in de populatieruimte bleven grotendeels onveranderd vergeleken met normaal overgrondlopen. Met andere woorden: groter alertheid versterkte de uitvoer van de bestaande overgrondstrategie zonder de onderliggende structuur te herschrijven. Dit stond in contrast met de veel grotere verschuiving die werd gezien tussen loopband- en overgrondlopen, waarbij de externe mechanica en sensorische aanwijzingen sterker verschillen.
Wat dit betekent voor hersenen, klinieken en machines
Voor een niet‑expert is de kernboodschap dat onze hersenen niet vertrouwen op één enkel, vast "programma" om het hoofd te stabiliseren tijdens het lopen. In plaats daarvan kiezen en verfijnen ze verschillende strategieën van lage complexiteit afhankelijk van de context — of de beweging door een band wordt aangedreven, zelfgevoerd is door echte ruimte, of uitgevoerd wordt in een meer opgewonden interne toestand. Loopbandlopen wordt beheerst door een stabiel patroon dat simpelweg met snelheid schaalt, terwijl overgrondlopen een anders georganiseerd en schijnbaar effectiever plan inzet dat profiteert van natuurlijke lichaamsmechanica en rijkere sensorische feedback. Arousal werkt dan als een volumeknop die dat plan versterkt zonder het te herschrijven. Deze inzichten helpen verklaren waarom loopband- en overgrondlopen anders kunnen aanvoelen en functioneren, suggereren nieuwe invalshoeken voor het ontwerpen van revalidatieprogramma’s die gericht zijn op hoofd‑ en nekcontrole, en bieden inspiratie voor robots die hun "hoofd" stil moeten houden terwijl ze door een onvoorspelbare wereld bewegen.
Bronvermelding: Wei, RH., Stanley, O.R., Charles, A.S. et al. Locomotion engages context-dependent motor strategies for head stabilization in primates. Commun Biol 9, 234 (2026). https://doi.org/10.1038/s42003-026-09512-2
Trefwoorden: hoofdstabilisatie, locomotie, nekspieren, loopband versus overgrond, motorische controlestrategieën