Clear Sky Science · nl
Meertraps Kalman-filteringssysteem voor sensorfusie geïntegreerd met MoS2-memtransistor met 1024 geleidingsniveaus
Slimmere waarneming voor veiligere zelfrijdende auto’s
Moderne zelfrijdende auto’s vertrouwen op een hele reeks sensoren om de weg te begrijpen, maar het snel en efficiënt samenvoegen van al die informatie is buitengewoon moeilijk. Deze studie laat zien hoe een nieuw type klein elektronisch apparaat, een memtransistor genoemd, dat samenvoegproces — sensorfusie — kan versnellen en vereenvoudigen. Door belangrijke berekeningen van omvangrijke digitale chips naar zuinige analoge hardware te verplaatsen, verlagen de onderzoekers zowel het energieverbruik als de vertraging drastisch, en wijzen ze op veiligere, meer responsieve autonome systemen die kunnen omgaan met slecht weer, geblokkeerd zicht en drukke straten.
Waarom meer ogen beter zijn dan één
Op hedendaagse testbanen en snelwegen kijkt een autonoom voertuig naar de wereld met een mix van camera’s, laserafstandsbepaling (LiDAR), millimetergolfradar en bewegingssensoren die bijhouden hoe de auto beweegt. Elk van deze heeft zijn eigen sterke en zwakke punten: LiDAR kan worden geblokkeerd door vrachtwagens of gebouwen, radar heeft moeite met fijne details, en bewegingssensoren driften langzaam weg van de werkelijke positie als ze alleen worden gebruikt. Om een betrouwbaar beeld van het omringende verkeer te krijgen, moet het voertuig deze onvolmaakte waarnemingen samenvoegen tot één consistente schatting van waar objecten zijn en hoe ze bewegen. Een wiskundig hulpmiddel dat Kalman-filter wordt genoemd, is een werkpaard geworden om dit in realtime te doen, maar in conventionele vorm draait het op digitale processors die energie verbruiken en vertragingen introduceren wanneer data herhaaldelijk tussen analoge sensoren en digitale logica worden verplaatst.

Een nieuw type elektronisch bouwblok
Het team pakt dit probleem aan met een apparaat dat is gemaakt van een enkele atomaire laag van het halfgeleidend materiaal molybdeendisulfide (MoS2). Hun memtransistor combineert de rollen van een geheugenelement en een transistor in één drievoudige structuur, waarvan de elektrische geleidbaarheid soepel kan worden afgesteld en vervolgens onthouden, zelfs wanneer de stroom wordt uitgeschakeld. Door voorzichtig kleine vacuümplaatsen in het atomaire rooster van het materiaal met elektrische velden te beheren, kan het apparaat betrouwbaar 1024 onderscheiden geleidingsniveaus vasthouden over een breed bereik, en die langer dan een jaar bewaren. Net zo belangrijk is dat deze niveaus vrijwel lineair veranderen wanneer de stuurspanning wordt geswept, wat het mogelijk maakt een gewenste wiskundige gewichtsfactor in het Kalman-filter rechtstreeks te koppelen aan een fysieke instelling van de memtransistor.
Wiskunde omzetten naar hardware
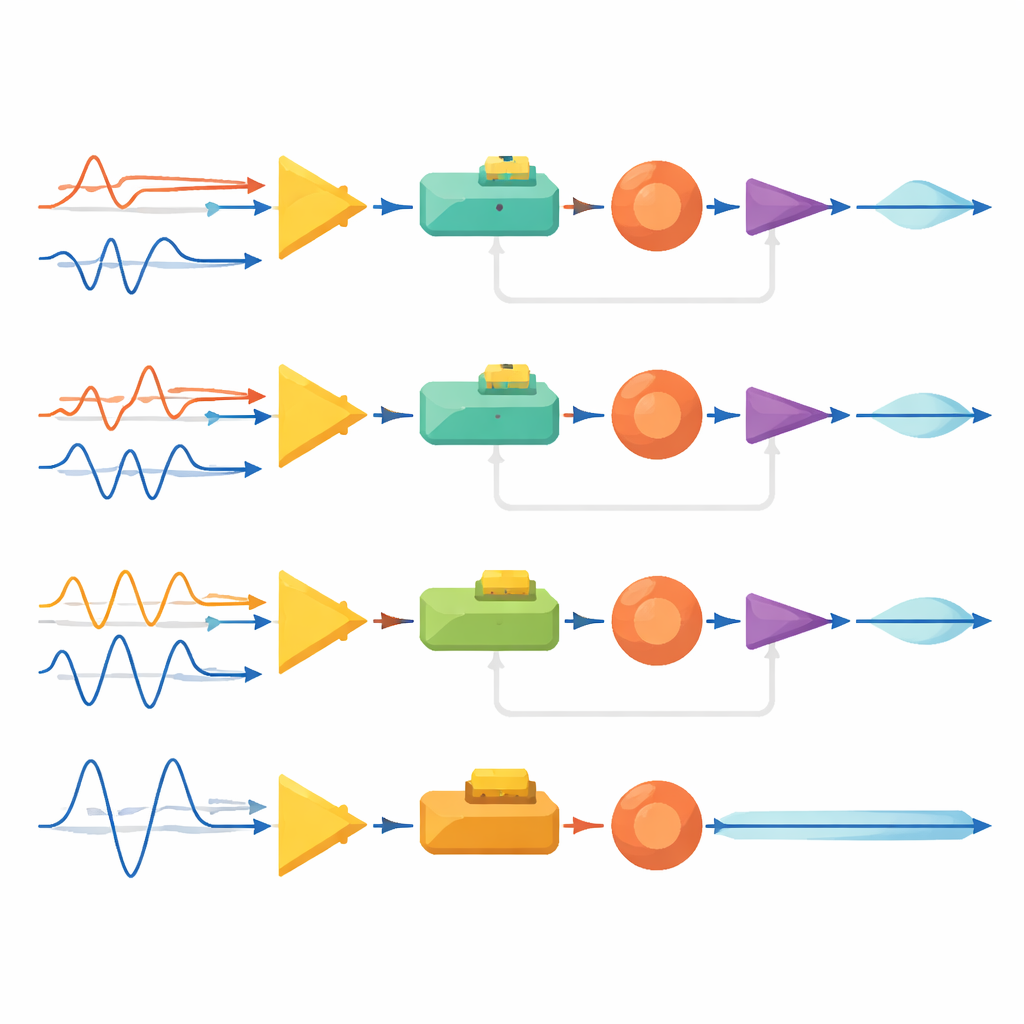
Bouwend op dit apparaat ontwerpen de onderzoekers een analoge versie van een meertraps Kalman-filter dat direct op sensorspanningen werkt in plaats van op digitale getallen. De schakeling bestaat uit drie gekoppelde stadia die de positie, snelheid en versnelling van een voertuig schatten. Binnen elk stadium worden basisbewerkingen zoals aftrekken, integreren, optellen en differentiëren uitgevoerd door compacte analoge modules. De cruciale "gain"-factor die het filter vertelt hoeveel vertrouwen het moet hebben in nieuwe sensorwaarnemingen versus zijn eigen voorspellingen, wordt geïmplementeerd met de geleidbaarheid van de memtransistor. Door eenvoudigweg een poortspanning aan te passen, kan het systeem soepel wijzigen hoe sterk het luistert naar LiDAR-, radar- of bewegingssensoren, zonder software te hoeven herschrijven.
Rijsituaties en zware omstandigheden
Om te laten zien hoe dit in de praktijk werkt, implementeert het team het volledige drie-traps filter op een printplaat gevuld met hun MoS2-apparaten en standaard analoge componenten. Ze voeren realistische, ruisige signalen in die nabootsen wat LiDAR, radar en bewegingssensoren zouden zien tijdens een inhaalmanoeuvre bij een baanwissel op de snelweg. Terwijl de signalen door elk stadium stromen, worden de uitgangen schoner en leveren consistente schattingen van positie, snelheid en versnelling op, terwijl scherpe veranderingen die van belang zijn voor de veiligheid, zoals plots remmen, behouden blijven. Het systeem is vooral indrukwekkend wanneer één sensor onbetrouwbaar wordt of geblokkeerd raakt — bijvoorbeeld wanneer een vrachtwagen tijdelijk een ander voertuig voor LiDAR verbergt. Door in hardware de gain van de aangetaste sensor te verlagen, verschuift het analoge filter automatisch zijn vertrouwen naar de overgebleven ingangen en naar eerdere bewegingspatronen, waardoor snelheids- en versnellingsschattingen soepel en fysisch redelijk blijven.
Snellere, slankere ‘hersenen’ voor machines
Vergeleken met een standaard digitale implementatie van dezelfde filtertaak gebruikt het analoge memtransistor-gebaseerde systeem ongeveer 13 keer minder energie en voltooit het zijn berekeningen ongeveer 59 keer sneller, terwijl het gelijktijdig drie belangrijke bewegingsvariabelen verwerkt. Aangezien de apparaten compact, stabiel en compatibel met grootschalige fabricage zijn, duidt deze aanpak op toekomstige "in-sensor" of "near-sensor" verwerkingsblokken die dicht bij camera’s en radars in auto’s, drones en andere verbonden machines kunnen worden geplaatst. Voor niet-specialisten is de kernboodschap dat door de fysica van geavanceerde materialen een deel van de wiskunde te laten uitvoeren, ingenieurs slimmer, sneller en efficiënter elektronische "hersenen" kunnen bouwen die autonome systemen helpen betrouwbaar te navigeren, zelfs wanneer het zicht op de wereld verre van perfect is.
Bronvermelding: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Trefwoorden: autonoom rijden, sensorfusie, Kalman-filter, memtransistor, analoog rekenen