Clear Sky Science · nl
TinyML-pijplijn voor efficiënte scheurclassificatie in UAV-gebaseerde inspecties van de staat van constructies
Slimmere ogen in de lucht
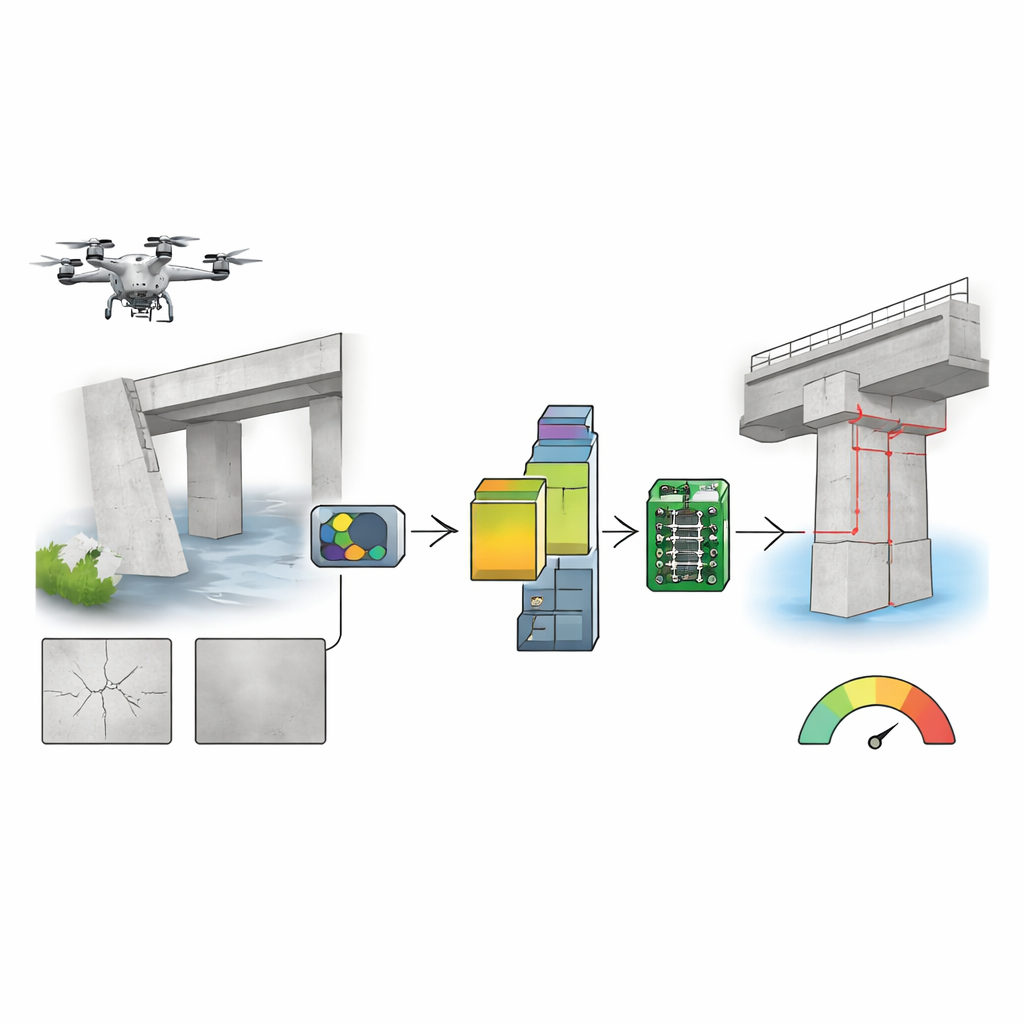
Bruggen, dammen en andere kritieke constructies verouderen net als mensen, en kleine scheurtjes kunnen vroege waarschuwingen zijn voor toekomstige falingen. Ingenieurs sturen steeds vaker kleine drones om deze oppervlakken te fotograferen, maar veel van die beelden moeten vandaag nog naar verre servers worden gestuurd voor analyse, wat batterijvermogen verbruikt en privacyrisico’s creëert. Dit artikel onderzoekt hoe je het scheur-detecterende "brein" kunt verkleinen tot een tiny chip op milliwatt-schaal die op de drone zelf kan meekunnen, waardoor inspecties sneller, veiliger en een stuk efficiënter worden.
Waarom scheuren ertoe doen
Traditionele methoden om de staat van constructies te volgen leunen vaak op contact-sensoren die op beton en staal worden vastgebout of -gelijmd. Deze systemen zijn duur in installatie en signaleren meestal problemen pas nadat de schade al gevorderd is. Visuele inspectie biedt een directere blik, maar het sturen van menselijke inspecteurs op steigers of in rijstroken is traag, riskant en subjectief. Kleine onbemande luchtvaartuigen (UAV’s) met camera’s bieden een beter alternatief: zij kunnen snel brugdekken en wanden afspeuren en duizenden gedetailleerde foto’s vastleggen die haarfijne scheurtjes tonen. De uitdaging is wat je met al die data doet wanneer de drone slechts beperkte batterijduur en vaak onbetrouwbare netwerkverbindingen heeft.
Het probleem van alles naar de cloud sturen
De meeste huidige systemen volgen een patroon van "edge-acquisitie–cloud-inferentie". De drone fungeert simpelweg als vliegende camera en streamt beelden naar een krachtige computer elders die een deep-learningmodel draait om te beslissen of elk deel van het beton een scheur bevat. Vanuit rekenkundig oogpunt is dat logisch, maar het heeft grote nadelen. Het streamen van hoogwaardige beelden put de batterij van de drone snel uit en verkort de vliegtijd drastisch. Als de draadloze verbinding wegvalt of verzwakt, kan de inspectiemissie precies op het verkeerde moment vastlopen. En het doorsturen van gedetailleerde beelden van strategische infrastructuur naar externe servers roept begrijpelijke privacy- en veiligheidszorgen op. Deze spanningen motiveren een andere aanpak: de intelligentie direct op de drone plaatsen, op hardware die nauwelijks krachtiger is dan een digitale horloge.
Het brein krimpen tot op een tiny chip
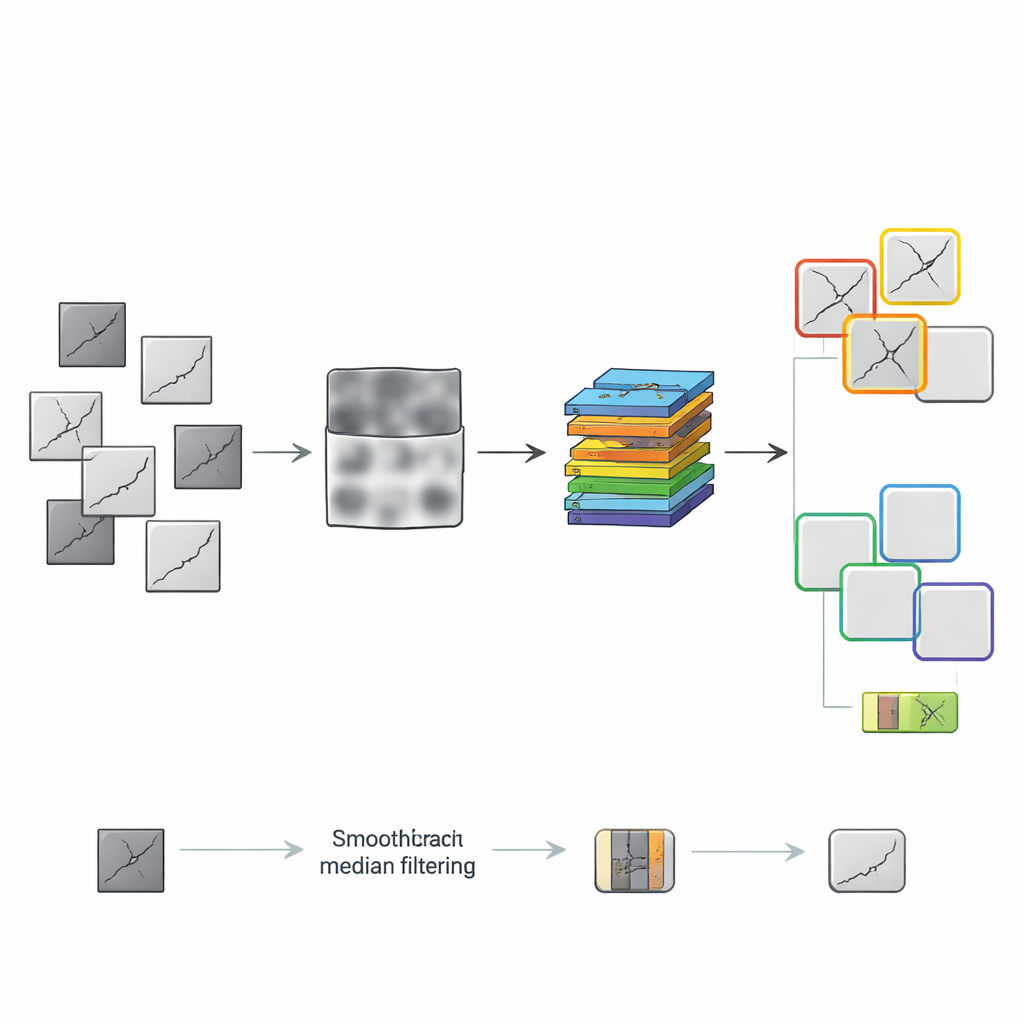
De auteurs bouwden een end-to-end pijplijn die draait op een energiezuinige microcontroller, de STM32H7, met een compact neuraal netwerk genaamd MobileNetV1x0.25. In plaats van een nieuw model uit te vinden, richtten ze zich op alles daaromheen: hoe de beelden worden voorbewerkt en hoe het model wordt gecomprimeerd. Ze gebruikten een veel bestudeerde dataset van meer dan 50.000 betonbeelden, opgesplitst in kleine patches gelabeld als "scheur" of "geen scheur", en trainden en testten verschillende manieren om deze patches voor te bereiden voor het tiny-model. Eén route volgde een handmatig samengestelde reeks stappen zoals omzetten naar grijswaarden, contrastversterking, ruisverwijdering, gladmaken en uiteindelijk het omzetten van beelden naar zwart-witte silhouetten. Een andere route liet een "gulzige" zoekstrategie stapsgewijs een voorbewerkingsketen opbouwen, steeds de combinatie behoudend die daadwerkelijk de prestaties van het model verbeterde.
Het vinden van het juiste evenwicht in de pijplijn
De tests toonden aan dat meer verwerking niet altijd beter is. De handmatige pijplijn, die eindigde met strikte binarisatie, schaadde het neurale netwerk juist: het verwijderde subtiele gradaties die het model nodig had om fijne scheuren te detecteren. Daarentegen vond de gulzige zoekstrategie dat een eenvoudiger paar stappen—omzetting naar grijswaarden gevolgd door medianefiltering om ruis zachtjes te gladstrijken—de beste resultaten opleverde. Daarbovenop onderzocht het team systematisch vier manieren om het model samen te persen: het omzetten van getallen van volle precisie naar acht-bits gehele getallen, trainen met kwantisatie-bewuste methoden, het wegsnoeien van minder belangrijke gewichten, en het clusteren van vergelijkbare gewichtswaarden. Ze probeerden deze technieken afzonderlijk en in combinaties, en zetten de resulterende modellen op de microcontrollerboard en maten niet alleen nauwkeurigheid, maar ook geheugenverbruik, verwerkingstijd en energie per beslissing.
Tiny computer, grote prestaties
Één configuratie bleek de beste alleskunner: een invoer bestaande uit grijswaarden plus medianefilter die een model voedt dat snoeien combineert met kwantisatie-bewuste training in een acht-bits formaat. Deze compacte opzet bereikte een F1-score—een evenwicht tussen het vinden van echte scheuren en het vermijden van valse alarmen—van 0,938, een stijging van meer dan 11 procentpunten ten opzichte van eerdere on-device scheurdetectoren. Tegelijkertijd had het maar ongeveer 2,9 megabyte werkgeheugen, 309 kilobyte programmastructuur en minder dan een halve seconde nodig om elke afbeeldingspatch te verwerken. Elke beslissing verbruikte ruwweg 0,6 joule energie. Wanneer deze scheurclassificator op een DJI Mini 4 Pro-drone wordt gemonteerd en continu draait, zou dat de vliegtijd met slechts ongeveer 4 procent verminderen, vergeleken met grofweg een kwart van de batterij die wordt verbruikt door populaire, veel zwaardere edge-computing boards.
Wat dit betekent voor inspecties in de praktijk
Voor niet-specialisten is de kernboodschap dat serieuze structurele beoordelingen niet langer vereisen dat gevoelige beelden naar afgelegen datacenters worden gestuurd of dat er zware, energieverslindende computers de lucht in moeten. Door zorgvuldig af te stemmen hoe beelden worden opgeschoond en hoe het neurale netwerk wordt gecomprimeerd, tonen de auteurs aan dat een duimgrootte chip betrouwbaar scheuren in beton kan herkennen zonder de batterij van een drone wezenlijk aan te tasten. Het systeem blijft redelijk robuust tegen bewegingsonscherpte en veranderende verlichting, en gedraagt zich verstandig zelfs wanneer scheurbeelden zeldzaam zijn tussen veel gezonde patches. Gezamenlijk brengen deze resultaten drone-gebaseerde inspecties dichter bij een toekomst waarin zwermen van kleine, goedkope UAV’s ons infrastructuurnetwerk stilletjes kunnen patrouilleren en vroegtijdig problemen opsporen met slimme, efficiënte onboard-intelligentie.
Bronvermelding: Zhang, Y., Nürnberg, A., Rau, L.S.M. et al. TinyML pipeline for efficient crack classification in UAV-based structural health inspections. Sci Rep 16, 8964 (2026). https://doi.org/10.1038/s41598-026-43534-4
Trefwoorden: drone-inspectie, betonscheuren, tiny machine learning, monitoring van structurele integriteit, edge-AI