Clear Sky Science · nl
Hardware-onafhankelijke regeling voor gedeeltelijke gravitatie-simulatie met een 2-DOF robotisch apparaat
Waarom lichtere zwaartekracht op aarde ertoe doet
Naarmate mensen langere reizen naar de Maan en Mars plannen, is het dringend nodig te weten hoe afwijkende zwaartekrachtniveaus het lichaam beïnvloeden. Dergelijke tests in de ruimte zijn duur en zeldzaam, dus wetenschappers gebruiken speciale draaiende apparaten op aarde, clinostaten genoemd, om lage zwaartekracht voor cellen en kleine weefsels na te bootsen. Dit artikel presenteert een nieuwe manier om zo’n apparaat te regelen zodat het betrouwbaar niet alleen gewichtloosheid kan nabootsen, maar ook de zwakkere aantrekking van de Maan, Mars en zelfs zwaartekrachtsniveaus dicht bij die van de Aarde—zonder sterk gebonden te zijn aan een specifiek type motor of hardware.
Draaien naar nepzwaartekracht
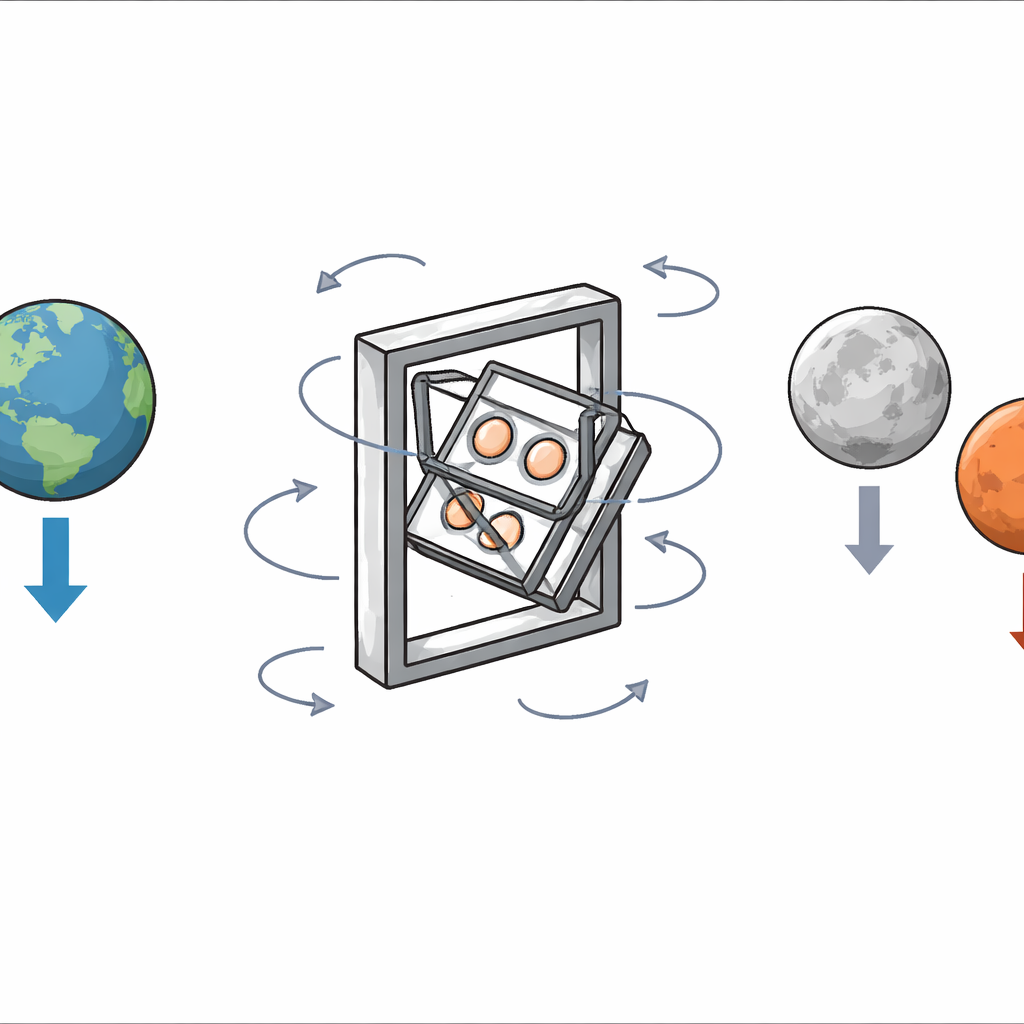
In de buurt van het aardoppervlak wijst zwaartekracht vrijwel overal bijna recht naar beneden. Een driedimensionale clinostaat neemt een klein proefmonster—zoals cellen of organoïden in een schaaltje—en draait het langzaam rond twee loodrechte assen. Omdat de oriëntatie van het monster constant verandert, blijft de richting van de zwaartekracht “zoals gezien” door de cellen verschuiven, en na verloop van tijd middelen die trekken uit. Wanneer de rotaties op de juiste manier zijn gerangschikt, kan de tijdsgemiddelde zwaartekracht tegen nul aanlopen, wat microzwaartekracht in een baan nabootst. Jarenlang is dit eenvoudige idee gebruikt om spierverlies, botverzwakking, veranderingen in het immuunsysteem en andere ruimteachtige effecten te bestuderen zonder de grond te verlaten.
Van gewichtloos naar "Maanachtige" zwaartekracht
Recente inzichten lieten zien dat het niet voldoende is alleen gewichtloosheid te bestuderen. Astronauten op de Maan of Mars zullen leven met zwaartekracht die zwakker is, niet afwezig. Om die kloof te overbruggen werd het concept van tijdsgemiddelde gesimuleerde gedeeltelijke zwaartekracht geïntroduceerd: in plaats van het gemiddelde weg te laten vallen, wordt de zwaartekracht iets vaker in één richting gehouden dan in de andere. Die bias creëert een gemiddeld trekkingsniveau ergens tussen nul en de volledige Aarde-zwaartekracht, waardoor wetenschappers condities kunnen nabootsen zoals 0,17 g op de Maan of 0,38 g op Mars. Eerdere regelmethoden konden dit wel, maar ze waren sterk afhankelijk van de precieze motoren en mechaniek en konden geen gedeeltelijke zwaartekracht produceren die hoger was dan ongeveer 0,44 g.
Een nieuwe manier om de spinner aan te sturen
De kerninnovatie van deze studie is om de buitenste motor van de clinostaat te regelen op basis van zijn hoek in plaats van op tijd. Vorige methoden gaven voor ieder moment aan hoe snel de motor moest draaien, maar echte hardware volgt dat plan nooit perfect: kleine vertragingen en motorgebonden limieten veroorzaken hoekafwijkingen, en die fouten lopen op, waardoor onderzoekers extra terugkoppellussen moesten toevoegen die op elk apparaat afzonderlijk zijn afgestemd. Hier herontwerpen de auteurs de regel zo dat de hoeksnelheid rechtstreeks als functie van de huidige hoek wordt gegeven. Die ogenschijnlijk kleine verschuiving vermindert de foutgroei sterk en maakt de methode grotendeels onafhankelijk van motorsterkte en traagheid. Tegelijkertijd wordt de binnenste motor aangedreven met een willekeurig-achtig patroon zodat de zwaartekracht niet steeds hetzelfde pad volgt, wat de experimentele betrouwbaarheid verbetert.
Zwaartekracht dichter bij huis duwen
Met computersimulaties bracht het team in kaart hoe een belangrijke regelparameter, genoemd α, de uiteindelijke gemiddelde zwaartekracht beïnvloedt. Door α te verhogen konden ze de gesimuleerde gedeeltelijke zwaartekracht opdrijven tot ongeveer 0,68 g—al veel hoger dan de oude limiet van 0,44 g. Om verder te komen introduceerden ze een "rusttijd"-truc: telkens wanneer het buitenframe de hoek bereikt waar de zwaartekracht samenvalt met de gewenste gemiddelde trek, stopt de motor kort. Tijdens deze pauze voelt het monster een constante zwaartekracht in die richting, wat de bias versterkt. Simulaties toonden aan dat langere pauzes de effectieve zwaartekracht dichter naar de 1 g van de Aarde duwen, en experimenten bevestigden waarden tot ongeveer 0,81 g met slechts ongeveer 1% afwijking van de voorspelde resultaten in het meest nauwkeurige bereik.
Testen van Maan, Mars en verder
De onderzoekers bouwden een twee-assen-clinostaat aangedreven door commerciële servomotoren en monitoren de zwaartekrachtrichting met een inertiesensor gemonteerd in het midden. Ze testten een reeks α-waarden en rusttijden, en maten hoe snel de gemiddelde zwaartekracht zich stabiliseerde en hoe goed experimenten overeenkwamen met simulaties. Voor matige α-waarden die overeenkomen met 0,33–0,63 g was de afwijking typisch rond 1% of minder. Simulaties en experimenten voor Maan- en Marsachtige instellingen leverden gemiddelde trekkrachten rond 0,17 g en 0,38 g op, terwijl ze toch gevarieerde zwaartekrachtpaden van run tot run behouden. De auteurs onderzochten ook praktische grenzen die worden opgelegd door motorresolutie en reactievertragingen, en geven eenvoudige richtlijnen voor het kiezen van actuatoren en veiligheidsmarges zodat andere laboratoria precieze gedeeltelijke zwaartekrachtsniveaus kunnen reproduceren.
Wat dit betekent voor de toekomstige gezondheid in de ruimte
In eenvoudige bewoordingen verandert dit werk een complex, hardware-gevoelig draaiend systeem in een meer plug-and-play simulator voor gedeeltelijke zwaartekracht. Door motorsnelheid aan hoek te koppelen en gecontroleerde pauzes toe te voegen, kan de methode getrouw een breed scala aan zwaartekrachtniveaus nabootsen, van diepe ruimte tot Maan en Mars en richting Aarde, zonder voortdurend handmatig bijregelen van regelsystemen. Die flexibiliteit maakt het voor veel onderzoeksgroepen gemakkelijker te bestuderen hoe cellen, weefsels en organoïden reageren op specifieke zwaartekrachtniveaus, wat ons helpt gezondheidsrisico’s te voorspellen en tegenmaatregelen te ontwerpen voor langdurige ruimtemissies.
Bronvermelding: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
Trefwoorden: simulatie van gedeeltelijke zwaartekracht, clinostaat, ruimtebiologie, microzwaartekrachtonderzoek, robotische bewegingsregeling