Clear Sky Science · nl
Kwantitatieve kernelbepaling van verkeersborden met behulp van schuine rand ruimtelijke-frequentierespons als scherptemetriek
Waarom vage autokamera’s ertoe doen
Moderne auto’s vertrouwen steeds meer op camera’s om voetgangers te detecteren, verkeersborden te lezen en het voertuig binnen de rijstrook te houden. Maar net als menselijk zicht kunnen camera’s door veroudering, warmte, trillingen of kleine montageverschuivingen geleidelijk achteruitgaan. Dit artikel onderzoekt een nieuwe manier om kwantitatief te meten hoe vervaagd een autokamera is geworden door te kijken naar alledaagse verkeersborden, waardoor fabrikanten mogelijk de gezondheid van camera’s in de loop van de tijd kunnen volgen in plaats van te wachten op storingen.
Verkeersborden omzetten in testkaarten
In fabrieken wordt de scherpte van camera’s gecontroleerd op speciale testpatronen voordat een apparaat wordt verzonden. Op de weg is er echter geen dergelijk gecontroleerd doelwit—alleen de echte wereld. De auteurs benutten één veelvoorkomend, repeteerbaar object in die wereld: verkeersborden met schone, hoogcontrast randen. Ze richten zich op een standaard meetmaat voor scherpte, de ruimtelijke-frequentierespons (SFR), die in wezen aangeeft hoe goed een camera fijne details in een beeld behoudt. Door licht schuin geplaatste (“slanted”) randen op verkeersborden te analyseren, kunnen ze SFR berekenen op een vergelijkbare manier als labtests, maar direct uit echte rijomgevingen.

Vastleggen hoe een lens licht verspreidt
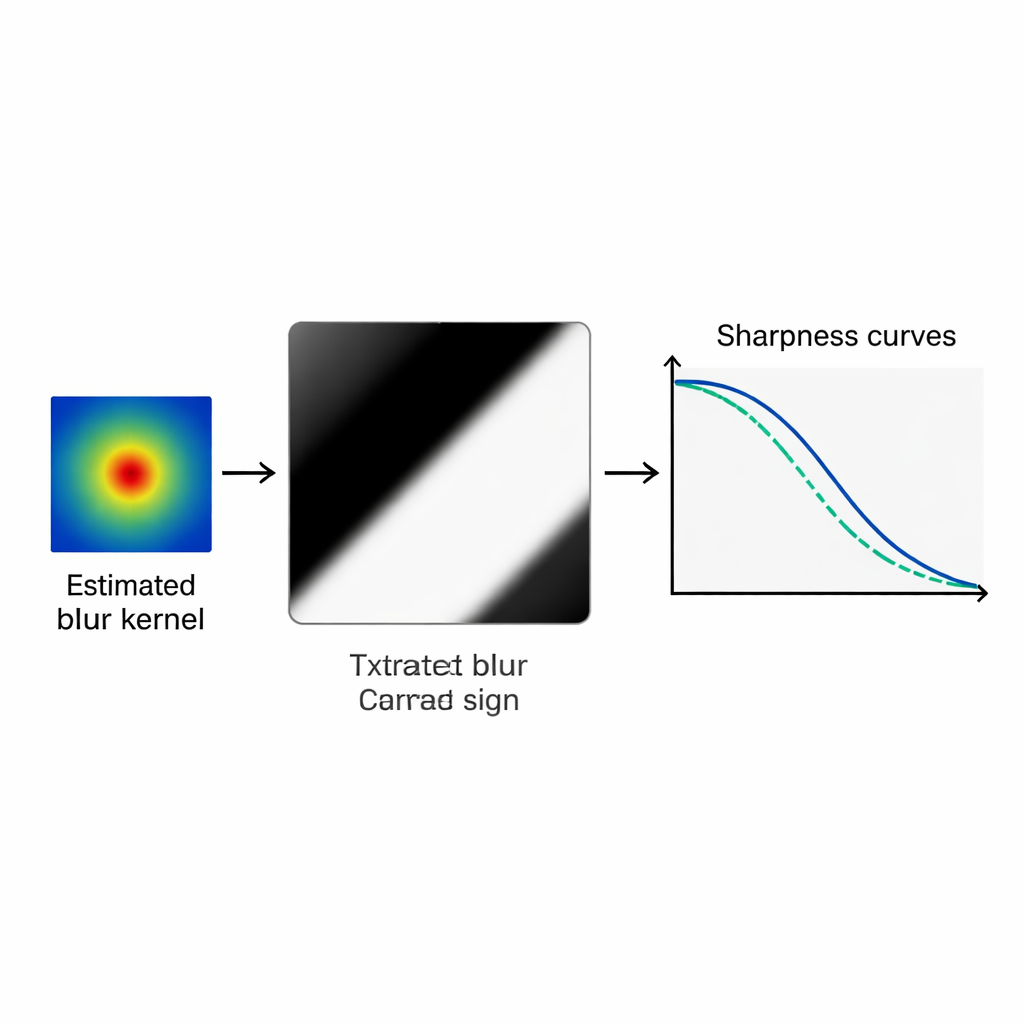
Wazigheid in een camera kan worden beschreven door een klein beeldje dat een vervagingskernel of point spread function heet. Dat toont hoe licht van één punt in de scène wordt verspreid over aangrenzende pixels op de sensor. Deze kernel direct uit een vervaagde foto schatten is normaal gesproken erg moeilijk, omdat veel combinaties van een scherp beeld en een vervagingspatroon een vergelijkbaar resultaat kunnen opleveren. Om dit aan te pakken, gebruiken de onderzoekers eerst optisch ontwerpsoftware om ongeveer 1300 realistische vervagingskernen te simuleren voor een specifieke autokamera over verschillende scherpstelinstellingen en posities in het beeld. Ze comprimeren deze grote verzameling vervolgens tot een compact geheel van sleutelpatronen met behulp van een statistisch hulpmiddel genaamd hoofdcomponentenanalyse (PCA), zodat elke realistische vervaging kan worden beschreven met slechts enkele tientallen getallen in plaats van honderden pixelwaarden.
Scherptecurven matchen in plaats van pixels
Zodra het compacte vervagings"woordenboek" is opgebouwd, begint het eigenlijke schattingsproces met twee kleine patcjes, elk 45 × 45 pixels, uit een vervaagd verkeersbordbeeld, samen met bijpassende patcjes uit een scherpe referentiefoto van hetzelfde bord. Voor een kandidaat‑vervagingskernel uit het PCA‑model worden de scherpe patcjes kunstmatig vervaagd en worden hun SFR‑curven berekend. Deze curven worden vervolgens vergeleken met de SFR‑curven gemeten uit de echte vervaagde patcjes. Een globale optimalisatiemethode bekend als differential evolution past de kernelparameters aan om het verschil tussen de twee sets curven te minimaliseren. In feite zoekt het algoritme het vervagingspatroon dat de synthetische scherptecurven zoveel mogelijk laat samenvallen met die gemeten uit het echte camerabeeld.
Hoe goed werkt de methode?
De auteurs testen hun methode eerst op synthetische data, waarbij ze de ware vervagingskernen exact kennen. Over tien verschillende vervagingsniveaus, van zeer scherp tot duidelijk onscherp, komen de geschatte kernen nauwkeurig overeen met de grondwaarheid volgens meerdere onafhankelijke similarity‑maatstaven, met structurele similariteit meestal boven 0,95 en zeer lage gemiddelde fouten. Ze vergelijken hun aanpak ook met recente state‑of‑the‑art "blind deblurring"‑technieken uit computer vision, die vooral bedoeld zijn om beelden er mooier uit te laten zien in plaats van de exacte vervagingsvorm te herstellen. Voor de taak van nauwkeurig reconstrueren van de onderliggende kernel voor deze specifieke camera presteert de nieuwe PCA‑gebaseerde methode duidelijk beter dan deze referenties. Ten slotte passen ze het algoritme toe op echte beelden van een aangepaste autokamera waarvan de sensor in kleine stappen kan worden verschoven om bekende onscherpte te veroorzaken. Hoewel de ware vervagingskernen hier niet beschikbaar zijn, produceren de geschatte kernen synthetische randen waarvan de scherptecurven en visuele verschijning zeer dicht bij de daadwerkelijke vervaagde randen blijven over een breed scala aan scherpstelinstellingen.
Van labtechniek naar controle van camera‑gezondheid
Voor niet‑specialisten is de belangrijkste uitkomst dat de auteurs gewone verkeersborden nu kunnen omzetten in een diagnostisch hulpmiddel dat onthult hoe de optiek van een autokamera in de loop van de tijd verandert, en niet alleen of een beeld scherp of zacht oogt. In plaats van een enkel slaag/faal‑getal codeert de geschatte vervagingskernel gedetailleerde informatie over hoe licht zich binnen de lens verspreidt, wat vervolgens kan worden teruggevoerd naar defocus of specifieke optische imperfecties. Hoewel de huidige methode veel rekenkracht vergt en alleen werkt op kleine patcjes rond heldere randen, wijst het op toekomstsystemen waarin af en toe beelden van voertuigen naar een server worden gestuurd die trage degradatie van beeldscherpte volgt. Dit kan preventief onderhoud aansturen, veiligere geavanceerde rijhulpsystemen ondersteunen en uiteindelijk helpen ervoor te zorgen dat de digitale "ogen" van autonome voertuigen jarenlang in goede staat blijven.
Bronvermelding: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
Trefwoorden: autokameras, beeldscherpte, vervagingskernel, beeldvorming van verkeersborden, monitoring van camera‑gezondheid