Clear Sky Science · nl
Objectbewuste semantische mapping met behulp van kansdichtheidsfuncties voor indoorrelocalisatie en padplanning
Waarom slimere binnenkaarten ertoe doen
Naarmate huishoud- en servicerapparaten van laboratoria naar echte appartementen gaan, moeten ze meer kunnen dan alleen muren en meubels ontwijken. Om echt nuttig te zijn, zou een robot moeten begrijpen dat een bed meestal een slaapkamer betekent, of dat een koelkast op een keuken wijst. Dit artikel presenteert een nieuwe manier voor robots om binnenruimtes te "zien" via de objecten die elke kamer definiëren, waardoor ze kunnen bepalen waar ze zich bevinden en paden kiezen die beter overeenkomen met hoe mensen hun woningen gebruiken.
Kamers zien door hun alledaagse objecten
Traditionele robotkaarten richten zich ofwel op ruwe geometrie of op abstracte symbolen. Rasterkaarten opgebouwd uit laserscans leggen gedetailleerde vormen vast, maar worden zwaar om op te slaan en traag om te doorzoeken, en kunnen robots in stijve, rasterachtige paden duwen. Hoog-niveau grafen van kamers en deuren zijn makkelijker te hanteren, maar laten de fijne details weg die nodig zijn voor nauwkeurig manoeuvreren. De auteurs overbruggen deze kloof door kaarten te organiseren rond kamers en de belangrijke statische objecten daarin – bedden, sofa's, koelkasten, tafels en dergelijke. Elke kamer wordt omlijnd op een plattegrond en elke belangrijke objectklasse krijgt een eigen laag, zodat verschillende soorten meubelstukken elkaar niet overschrijven.
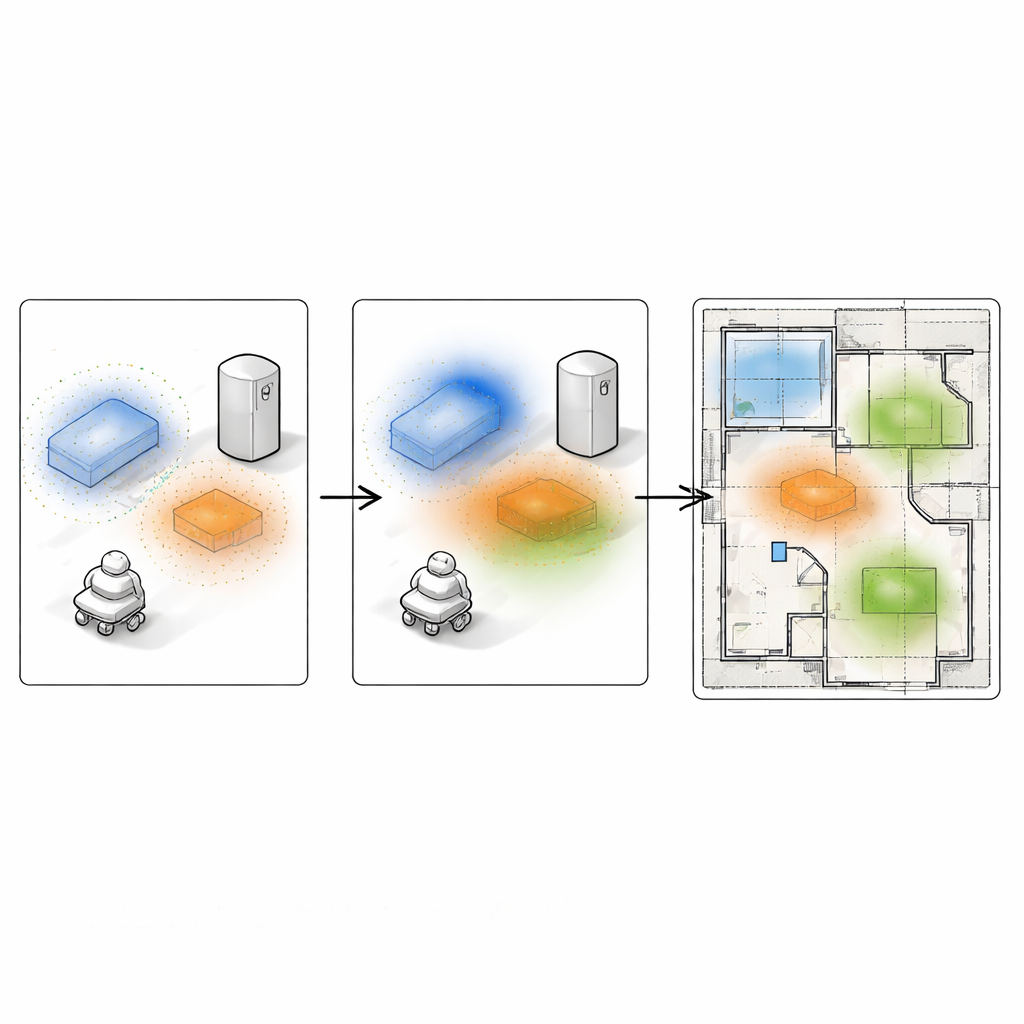
Meubels omzetten in zachte waarschijnlijkheidswolken
In plaats van elk object als een scherp begrensde doos te tekenen, zet de methode 3D-scans van meubels om in vloeiende "warmtekaarten" op de vloer. De robot reconstrueert eerst elke kamer in 3D met een RGB‑D-camera en standaardtools, en labelt vervolgens semantisch punten die bij objecten als muren, bedden of stoelen horen. Voor elk objecttype binnen een kamer worden clusters van punten gevonden en op de vloer geprojecteerd. Vanuit deze clusters schat het systeem een continue kansdichtheid – een zachte vlek die het hoogst is waar het object het waarschijnlijkst is en zacht naar buiten vervaagt. Door deze vlekken per objecttype op te stapelen ontstaat een compacte, gelaagde kaart die zowel de betekenis van objecten als hun ruwe vorm behoudt, terwijl ruis en gedeeltelijke waarnemingen op een natuurlijke manier worden verwerkt.
Robots laten herontdekken waar ze zijn
Een belangrijk gebruik van deze objectgerichte kaart is het helpen van een robot zichzelf opnieuw te lokaliseren wanneer hij geen idee heeft waar hij op de plattegrond staat – een veelvoorkomend probleem wanneer de robot net is opgestart of is verplaatst. De robot kijkt opnieuw met zijn dieptecamera, detecteert zichtbare objecten en bouwt zijn eigen kleine set kansvlekken voor die gedeeltelijke scène. Vervolgens verkent een evolutionair zoekalgoritme veel mogelijke robotposes over de gebouwkaart. Voor elke kandidaatpose worden de lokale vlekken over de globale kaart gelegd en wordt hun overeenkomst gemeten met een statistische afstand. Kamergrenzen en zichtlijncontroles leggen onmogelijke poses naast zich neer, zoals het zien van een koelkast door een muur heen. Over vele generaties evolueert de populatie kandidaatposes naar de locatie waar de waargenomen objecten het beste overeenkomen met de opgeslagen kansvelden, wat leidt tot een robuuste schatting van de positie en oriëntatie van de robot.
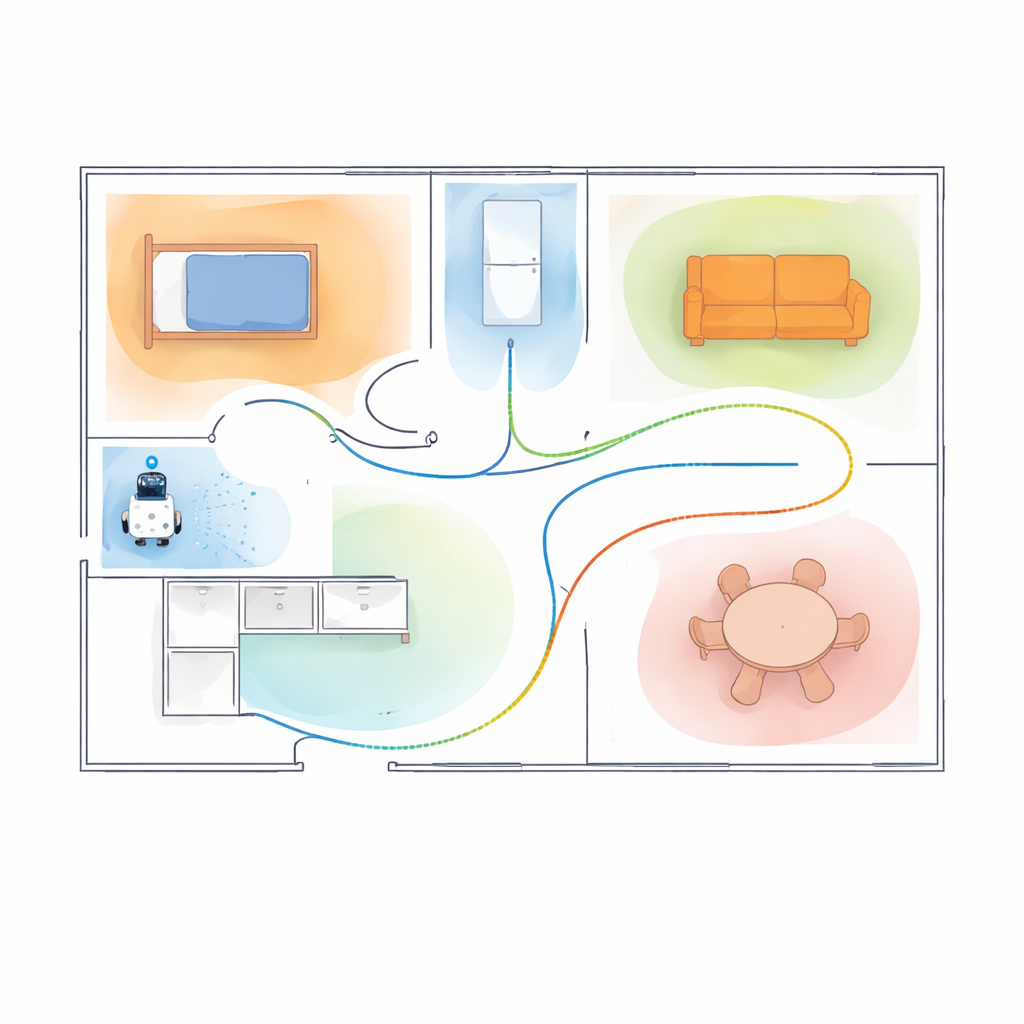
Paden plannen die rekening houden met hoe mensen ruimte gebruiken
Dezelfde kaart stuurt ook hoe de robot zich beweegt. Omdat elk objecttype wordt weergegeven als een zachte invloedssfeer, kan de robot worden geprogrammeerd om bepaalde gebieden te favoriseren of te vermijden door numerieke gewichten aan te passen. Bedden kunnen 's nachts gebieden worden om uit de buurt te blijven, terwijl tafels aantrekkingspunten kunnen worden wanneer naar voorwerpen wordt gezocht. Deze semantische voorkeuren worden gecombineerd met een standaard obstakelkaart en een veiligheidsmarge rond muren om één kostenlandschap over de plattegrond te vormen. Een klassiek padplanningsalgoritme vindt vervolgens routes die niet alleen botsingsvrij zijn, maar ook de gewenste sociale of taakgerelateerde voorkeuren volgen. Experimenten met een realistische dataset en een echt gemeubileerd appartement tonen aan dat deze semantisch bevooroordeelde paden beter overeenkomen met de bedoelde voorkeuren, soms ten koste van een kleine toename in padlengte, en in echte woningen vloeiender kunnen zijn.
Wat dit betekent voor alledaagse robots
Simpel gezegd leert dit werk robots om huizen te zien zoals mensen dat doen: als kamers gedefinieerd door hun meubels, niet slechts als lege dozen met muren. Door elk sleutelobject te omhullen met een zachte kanswolk kan een enkele compacte kaart zowel "Waar ben ik?" als "Hoe kom ik daar?" ondersteunen zonder aparte, taak-specifieke modellen. Tests tonen dat deze benadering robots helpt betrouwbaarder te lokaliseren in rommelige of op elkaar lijkende kamers en routes te kiezen die beter aansluiten bij menselijke verwachtingen. Naarmate deze ideeën rijpen, kunnen toekomstige huishoudrobots beleefder en intelligenter navigeren en zich door onze ruimtes bewegen met een bewustzijn dat veel minder mechanisch aanvoelt.
Bronvermelding: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Trefwoorden: indoor robotlokalisatie, semantische mapping, objectbewuste navigatie, probabilistische robotkaarten, padplanning