Clear Sky Science · nl
Diepe probabilistische berijdbaarheid met testtijd‑adaptatie voor onzekerheidsbewuste rovernavigatie op planeten
Waarom veiliger roverrijden belangrijk is
Als we wielrobots naar de Maan of Mars sturen, moeten ze zelfstandig over zand, rotsen en hellingen rijden. Eén verkeerde inschatting van hoe zacht de ondergrond is, kan een miljarden‑dollar rover voorgoed vastzetten, zoals gebeurde toen NASA’s Opportunity‑rover wekenlang vastzat in geribbeld zand. Deze studie introduceert een nieuwe manier voor rovers om het risico van de grond vóór hen ‘‘aan te voelen’’, veiliger routekeuzes te maken en zelfs tijdens het rijden van hun fouten te leren.
Zachte ondergrond als verborgen gevaar
Op andere werelden zijn de gevaarlijkste obstakels niet altijd keien of kliffen, die camera’s makkelijk zien, maar glad ogende plekken met los materiaal. Als de wielen van een rover in dit soort terrein doorslaan, glijdt het voertuig, kruipt het veel langzamer vooruit dan bedoeld, verbruikt het meer energie en kan het permanent onbereikbaar worden. Traditionele navigatiesystemen richten zich vooral op zichtbare geometrische gevaren—wat wel en niet op een obstakel lijkt—zonder volledig vast te leggen hoe de grond zich onder de wielen zal gedragen. Tegelijkertijd kunnen machine‑learningmethoden die wielslip uit beelden en 3D‑kaarten voorspellen, fout zitten in onbekende omstandigheden, zoals nieuw licht of steilere hellingen, en ze geven meestal niet aan hoe onzeker hun voorspellingen zijn.
De rover leren redeneren over risico
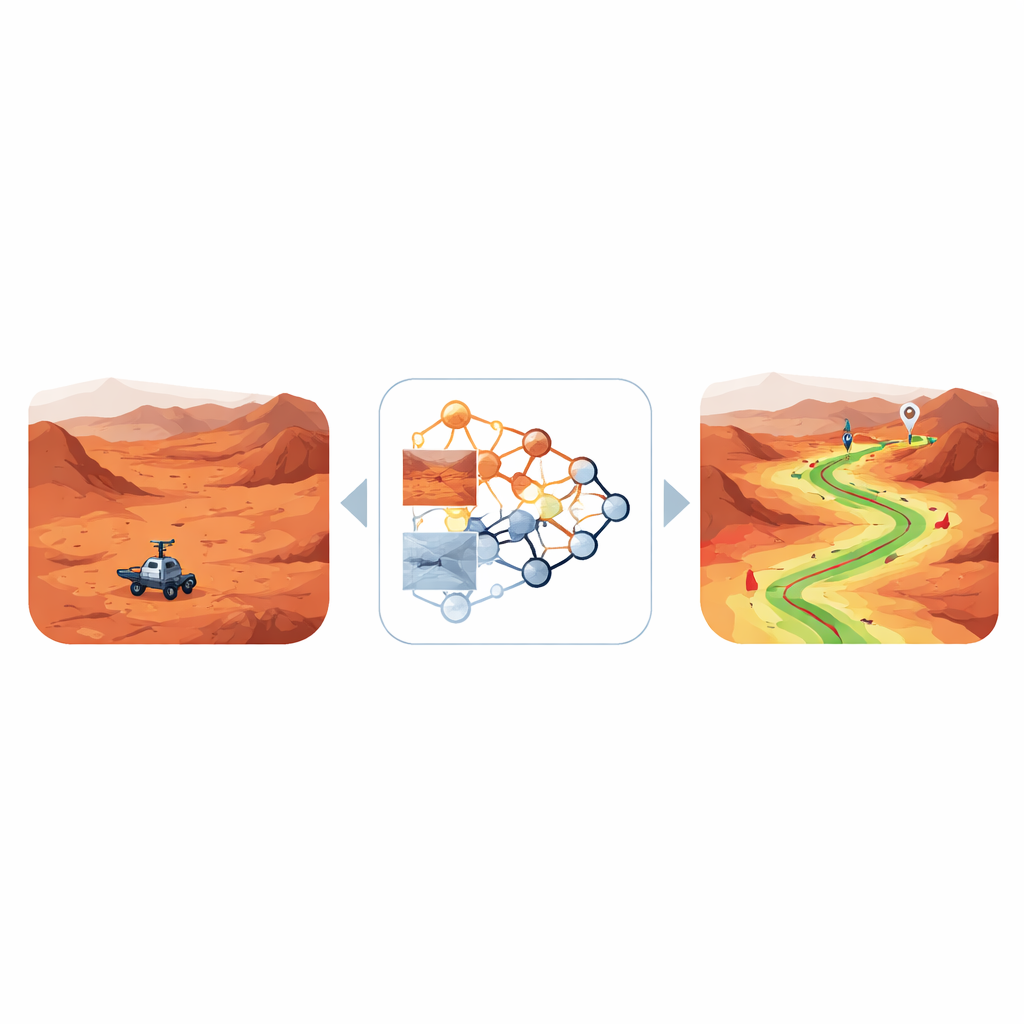
De auteurs stellen een geïntegreerd leer‑ en planraamwerk voor dat zij diepe probabilistische berijdbaarheid noemen. In plaats van één enkele ‘‘beste schatting’’ te geven van hoeveel de wielen zullen slippen op elk stuk terrein, voorspelt hun model een volledige kansverdeling van mogelijke slips, op basis van kleurbeelden en lokale helling. Een ensemble van diepe neurale netwerken bekijkt het landschap van bovenaf en geeft voor elke mogelijke zet op een raster zowel een verwachte slipwaarde als de onzekerheid daarvan. Vanuit deze verdeling zet het systeem slip om in een effectieve rijsnelheid en uiteindelijk in een reistijdkost voor elke stap. Gebieden waar de rover waarschijnlijk vastloopt krijgen zeer hoge kosten; gebieden waar de voorspelling zowel gunstig als zeker is, krijgen lage kosten. Een standaard padzoekalgoritme vindt vervolgens een route die korte afstand afweegt tegen laag risico op immobilisatie.
De rover laten leren terwijl hij rijdt
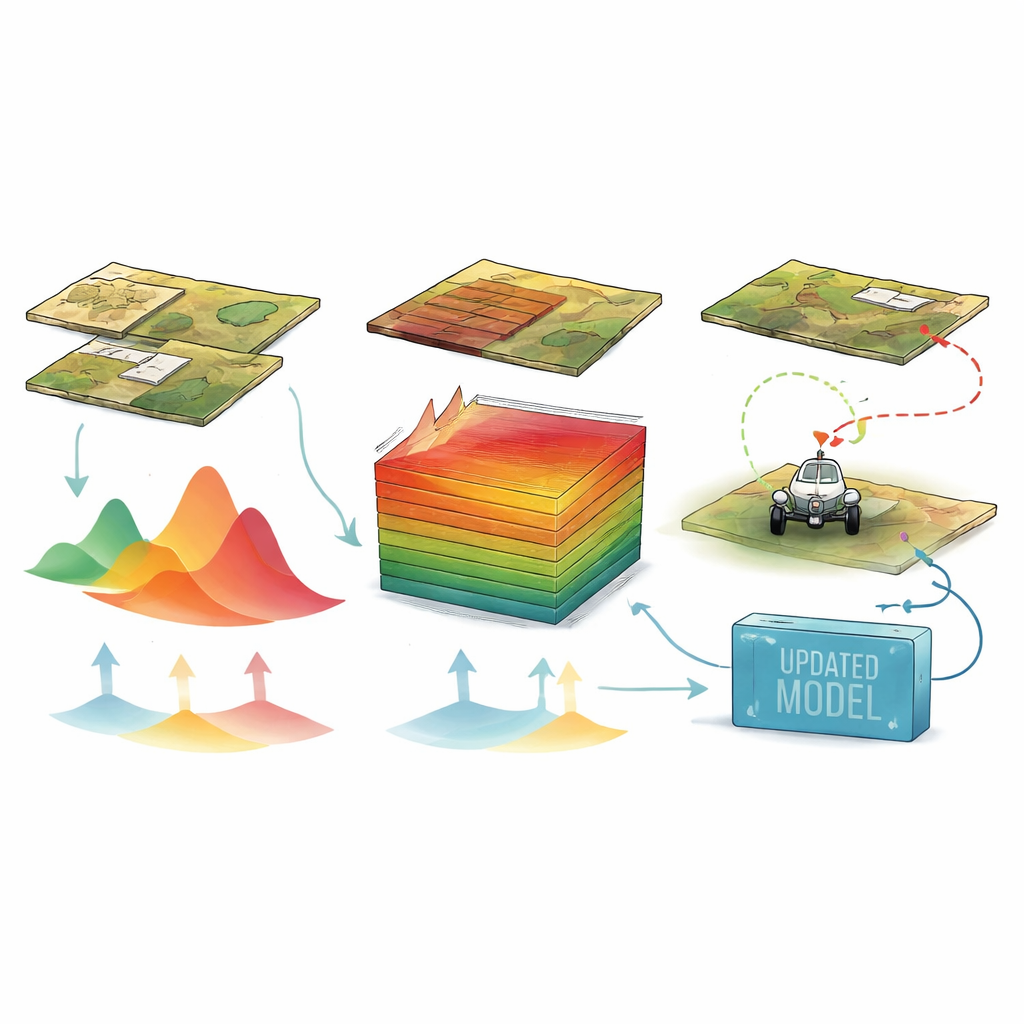
Een grote uitdaging in planetaire verkenning is dat de omstandigheden die een rover bij aankomst aantreft, sterk kunnen verschillen van die in de trainingsdata: hellingen kunnen steiler zijn, bodemkenmerken onbekend, of de verlichting heel anders. Om hiermee om te gaan bevat het raamwerk een testtijd‑adaptatiemechanisme. Terwijl de rover rijdt, meet hij de werkelijke slip die hij ervaart. Na elke korte beweging worden deze nieuwe metingen gebruikt om toegevoegde ‘‘schaal‑ en verschuif’’‑lagen in de neurale netwerken voorzichtig aan te passen, terwijl de oorspronkelijke gewichten vast blijven. Deze strategie stelt het model in staat zich snel aan te passen aan nieuw terrein met slechts een handvol observaties, terwijl het behoudt wat het al geleerd heeft over eerder geziene omstandigheden. De bijgewerkte voorspellingen voeden vervolgens het herplannen, zodat het gekozen pad tijdens de rit kan verbeteren.
Het systeem aan zware tests onderwerpen
Aangezien echte roverdata slechts beperkte typen terrein beslaan, bouwde het team een grote synthetische dataset van Mars‑achtige landschappen. Zij combineerden computergegenereerde ruwe topografie met tien verborgen terreinclasses, elk met eigen kleur en slipgedrag, en varieerden zowel hellingshoek als lichtinval om bekende en onbekende scenario’s te creëren. In duizenden gesimuleerde missies werd de nieuwe methode vergeleken met twee state‑of‑the‑art planners die ofwel onzekerheid negeren of deze minder direct gebruiken. Onder bekende omstandigheden presteerden alle benaderingen vergelijkbaar. Maar in de meest uitdagende gevallen—donkere verlichting en steiler, kraterachtig terrein—bereikte de diepe probabilistische berijdbaarheidsaanpak hogere succeskansen en lagere maximale slip, terwijl de reistijden concurrerend bleven. Wanneer adaptatie tijdens de vlucht was ingeschakeld, verminderde het systeem de voorspellingsfouten verder en verbeterde de veiligheid, vooral in omgevingen die sterk verschilden van de training.
Wat dit betekent voor toekomstige missies
Voor een algemeen publiek is de kernboodschap dat dit werk planetair rovers een voorzichtiger en zelfbewuster manier van rijden geeft op verraderlijk terrein. In plaats van blind te vertrouwen op één voorspelling van hoe hun wielen zullen grijpen, kunnen rovers nu zowel verwacht gedrag als onzekerheid meewegen en routes kiezen die snel zijn maar weinig kans hebben ze vast te zetten. Door continu te leren van hun eigen slipervaringen kunnen ze zich aanpassen aan nieuw zand, hellingen en licht zonder menselijke redding. Terwijl ruimteagentschappen langere en ambitieuzere oppervlaktemissies plannen, kan dergelijke onzekerheidsbewuste navigatie helpen ervoor te zorgen dat waardevolle robots meer tijd besteden aan het verkennen van nieuwe wetenschappelijke doelen en minder tijd aan het uitgraven van zichzelf uit problemen.
Bronvermelding: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Trefwoorden: navigatie van planetair rover, terrein berijdbaarheid, onzekerheidsbewuste planning, machine learning robotica, autonome verkenning