Clear Sky Science · nl
InFoRM: een verenigd inverse en voorwaarts model voor sensomotorische controle
Hoe de hersenen beweging kunnen vereenvoudigen
Elke keer dat je naar een kop pakt of op een toetsenbord tikt, moet je brein een intentie ("beweeg mijn hand daarheen") omzetten in precieze spieractiviteit en tegelijkertijd voorspellen hoe die beweging zal aanvoelen. Klassieke theorieën veronderstellen dat het brein hiervoor twee afzonderlijke interne rekenaars gebruikt: één om de spiersignalen te genereren en een andere om de inkomende sensaties te voorspellen. Deze studie onderzoekt een gedurfde alternatief: dat één enkel, verenigd circuit beide kanten van het probleem kan afhandelen — wat energie bespaart en de prestatie kan verbeteren.
Twee manieren om over controle te denken
Traditionele modellen van bewegingscontrole stellen een gesplitst systeem voor. Een "inverse" onderdeel zet een gewenst resultaat om (bijvoorbeeld het pad van de vingertop door de ruimte) in de benodigde spieractivatie, terwijl een "voorwaarts" onderdeel voorspelt hoe het lichaam zal bewegen en welke sensorische terugkoppeling dat oplevert. Deze twee delen worden in leerboeken vaak als afzonderlijke blokken getekend. Beeldvorming en laesiedata ondersteunen die nette scheiding echter niet eenduidig, en sommige hersengebieden lijken bij beide rollen betrokken te zijn. Bovendien kan het in stand houden van twee complexe circuits metabool kostbaar zijn. De auteurs vragen zich daarom af of één flexibel netwerk kan leren om motorische commando’s te produceren, sensorische terugkoppeling te voorspellen en zelfs het oorspronkelijke doel te achterhalen op basis van alleen de interne signalen.
Een enkel netwerk dat alles doet
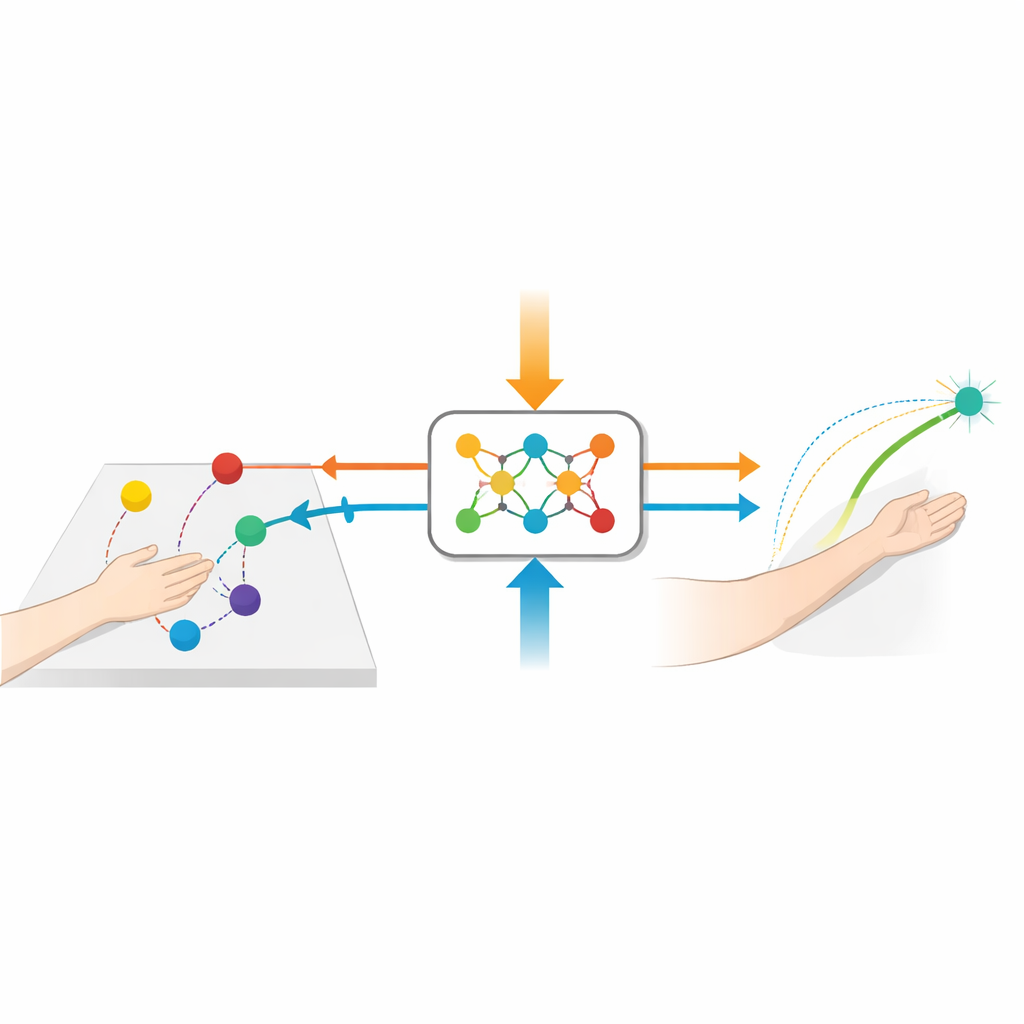
Om dit idee te testen bouwden de onderzoekers een computationeel model genaamd InFoRM (afkorting van inverse–forward–recognition model). In plaats van twee gestapelde modules gebruikt InFoRM één recurrent neuraal netwerk — een web van onderling verbonden eenheden — waarin doel-, spier- en sensorische signalen allemaal binnenkomen. Uit dit gemeenschappelijke "reservoir" van activiteit worden parallel drie uitlezingen getraind: één reconstrueert de gewenste handbaan, één genereert de spieractivatie die daarvoor nodig is en één voorspelt de sensorische signalen (spierlengte en snelheid) die zouden volgen. Cruciaal is dat dezelfde interne dynamiek alle drie de taken tegelijk ondersteunt, zodat het model informatie tussen de taken kan delen in plaats van elke taak geïsoleerd te leren.
Het model aan een praktische test onderwerpen
Het team nam echte armbewegingen op van proefpersonen die ritmisch vanaf een centraal punt naar doelen in verschillende richtingen en afstanden op een tafel reikten. Motion-capturegegevens en een gedetailleerd musculoskeletaal model leverden voor elke beweging de vingertopbaan, de geschatte spieractivaties en de overeenkomstige sensorische-achtige signalen van de spieren. InFoRM werd getraind op een subset van richtingen en vervolgens getest in verschillende uitdagende scenario’s: het herhalen van geleerde bewegingen, het uitvoeren van bewegingen in nieuwe tussenliggende richtingen ("morphing" tussen wat het had gezien) en het omgaan met natuurlijke, zelfgekozen overgangen tussen doelen. Ter vergelijking bouwden de auteurs ook meer klassieke controle-architecturen met gescheiden inverse en voorwaartse netwerken, plus verbeterde varianten die extra inputinformatie kregen.

Scherpere voorspellingen met minder middelen
Over alle tests heen reproduceerde het verenigde InFoRM-netwerk de opgenomen bewegingen en spiersignalen nauwkeuriger dan welke van de gescheiden architecturen dan ook. De outputs volgden de echte signalen dichter en met kleinere fouten, zelfs wanneer gevraagd werd te interpoleren naar niet-getrainde richtingen of om te gaan met realistische, niet-gescripte doelreeksen. Belangrijk is dat InFoRM deze hogere nauwkeurigheid bereikte terwijl het evenveel of minder neuronen gebruikte en veel minder trainingsiteraties nodig had, wat wijst op betere computationele efficiëntie. Het feit dat het ook de beste uitgebreide controlemodele versloeg — eentje die toegang had tot dezelfde combinatie van doel-, motor- en sensorische informatie — suggereert dat het voordeel voortkomt uit het integreren van alles in één recurrent circuit, en niet alleen uit rijkere inputs.
Wat dit betekent voor ons begrip van de hersenen
De bevindingen ondersteunen het idee dat de hersenen mogelijk geen scherp gescheiden "voorwaartse" en "inverse" motoren voor beweging in stand houden. In plaats daarvan zou een enkel, rijk verbonden circuit impliciet beide kunnen bevatten, waarbij motorcommando’s en voorspellingen voortkomen uit dezelfde onderliggende dynamiek. Dit perspectief sluit goed aan bij moderne visies op de hersenen als voorspellende machines, die voortdurend verwachtingen genereren en bijwerken over het eigen lichaam en de wereld. Hoewel het model nog steeds een vereenvoudigde abstractie is en biologische details zoals zenuwvertragingen en veranderende synapsen verder onderzocht moeten worden, laat InFoRM zien dat een verenigd ontwerp zowel krachtig als zuinig kan zijn en biedt het een overtuigend alternatief blauwdruk voor hoe ons zenuwstelsel beweging zou kunnen aansturen.
Bronvermelding: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Trefwoorden: sensomotorische controle, interne modellen, neurale netwerken, motorisch leren, predictive processing