Clear Sky Science · nl
ACFM: adaptief kanaalgewogen fusie-algoritme voor het verbeteren van kleine-objectdetectieprestaties in UAV-verkeer
Meer zien vanuit de lucht
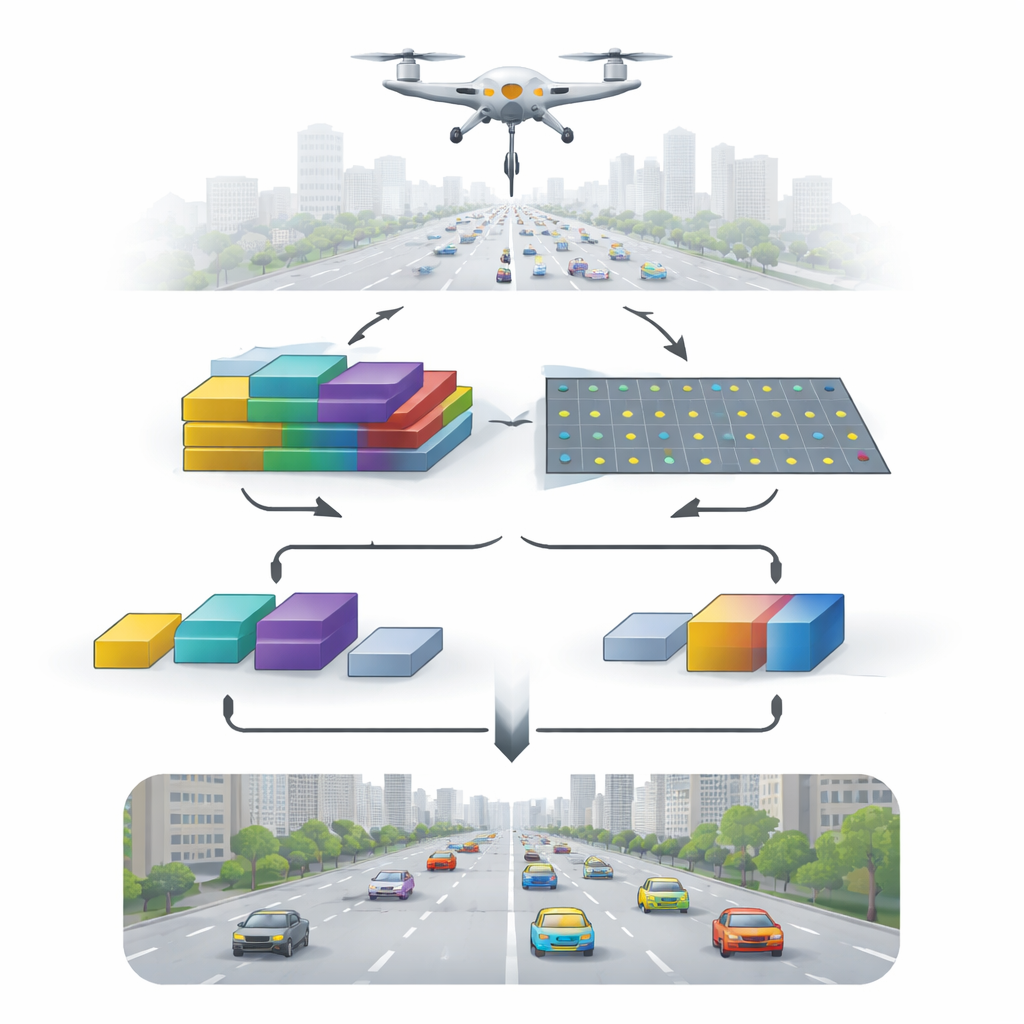
Naarmate drones steeds vaker verkeer, menigteveiligheid en rampgebieden monitoren, stuiten ze op een eenvoudig maar hardnekkig probleem: van grote hoogte beslaan de zaken waar we om geven—auto's, bussen, zelfs mensen—vaak slechts enkele pixels. Deze kleine vlekjes zijn gemakkelijk voor algoritmen te missen, vooral in drukke stadsstraten vol schaduwen, borden en bewegingsonscherpte. Dit artikel introduceert een nieuwe manier om computers zulke kleine objecten in dronebeelden helderder te laten “zien”, zonder de detectiesnelheid drastisch te vertragen.
Waarom kleine stipjes ertoe doen
Dronecamera's leggen brede scènes vast vanaf grote hoogtes, zodat één afbeelding snelwegen, gebouwen, bomen en tientallen voertuigen kan bevatten. De meeste van die voertuigen verschijnen zeer klein en kunnen elkaar overlappen of verbergen. Traditionele deep-learning detectors zijn uitstekend in het vinden van grote, duidelijke objecten, maar verliezen vaak fijne details naarmate informatie door de diepere lagen van het netwerk stroomt. Het gevolg is dat kleine voertuigen wegvloeien in de achtergrond, met name bij drukke kruispunten, weinig licht of licht onscherpe opnames. Bestaande multischaalmethoden helpen enigszins door informatie uit verschillende lagen te combineren, maar ze vertrouwen meestal op vaste, vooraf ingestelde regels en worstelen om zich aan te passen wanneer de scène bijzonder rommelig of complex wordt.
Een slimmere manier om aanwijzingen te mengen
De auteurs stellen een adaptief kanaalgewogen fusiemodule voor, of ACFM, ontworpen om in bestaande objectdetectors te worden ingebouwd en deze beter te maken in het opsporen van kleine doelen in droneverkeerscènes. In plaats van alle visuele informatie gelijk te behandelen, voert ACFM twee gespecialiseerde takken parallel uit en fuseert vervolgens hun outputs op een scène-afhankelijke manier. De ene tak verfijnt hoe features over schalen worden behandeld zodat fijne ruimtelijke details niet wegspoelen. De andere tak werkt als een schijnwerper, waarbij echt belangrijke hints van kleine objecten worden versterkt en storende achtergrondpatronen worden onderdrukt. Cruciaal is dat de fusie tussen deze takken niet vaststaat. ACFM past aan hoeveel het elke tak vertrouwt afhankelijk van de huidige afbeelding, waardoor het systeem anders kan reageren op een rustige snelweg dan op een dicht kruispunt.
Details behouden over schalen heen
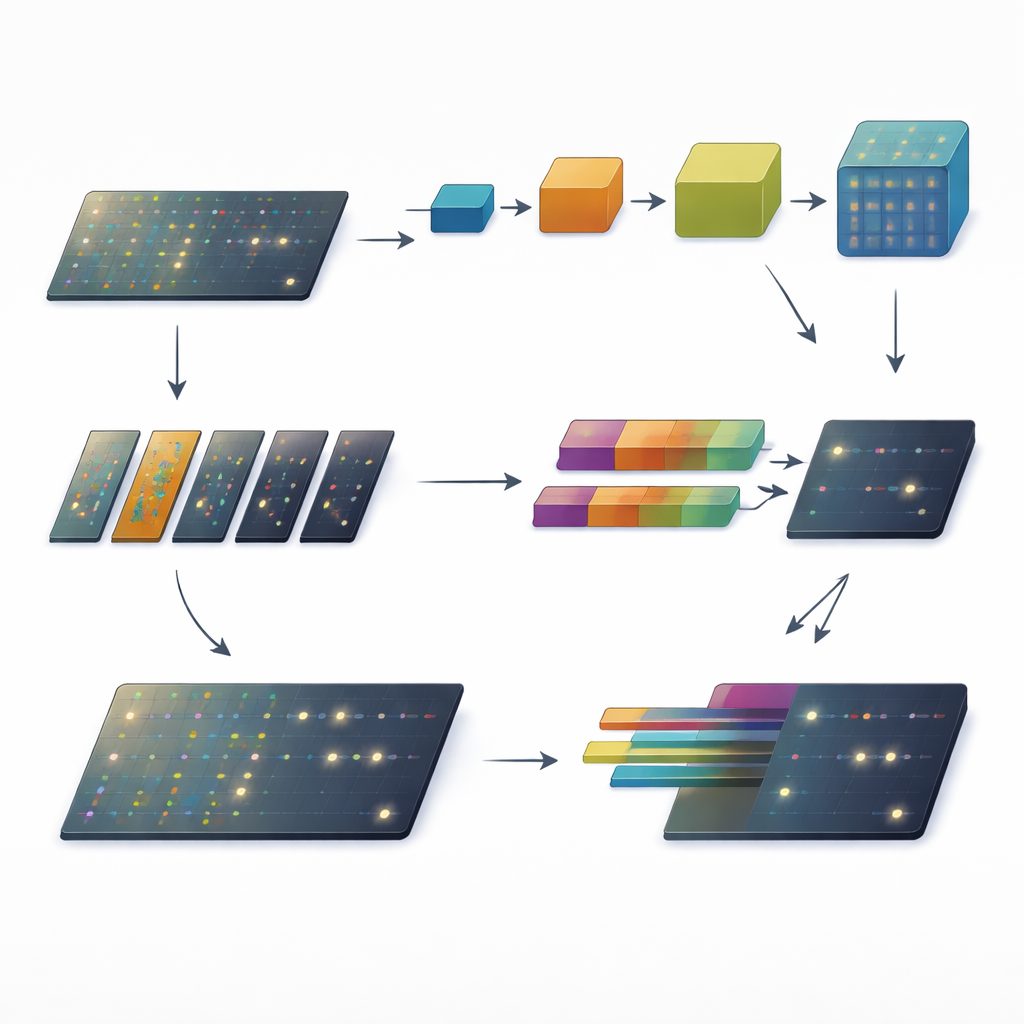
In de eerste tak, de multi-scale refinement block genoemd, stuurt het netwerk features door een paar paden. Het ene pad behoudt simpelweg de originele informatie, waardoor de fijne, hoge-resolutiedetails blijven bestaan. Het andere pad comprimeert en breidt vervolgens de afbeeldingsrepresentatie uit, wat het model aanspoort de bredere context te begrijpen van waar kleine voertuigen zich in de scène bevinden. Aan het einde worden deze paden samengevoegd zodat elke uitvoerpixel profiteert van zowel scherpe lokale details als van begrip van de omgeving. Dit maakt het voor de detector gemakkelijker om strakkere, meer consistente begrenzingskaders te tekenen rond kleine auto's en bussen van verschillende groottes, zelfs wanneer de achtergrond druk is of gedeeltelijk wordt verborgen.
De achtergrondruis dempen
De tweede tak richt zich op aandacht. Hij splitst de featurekanalen in groepen en leert voor elke groep een spars mask (weinig activaties) dat alleen de meest veelbelovende regio's markeert. Gebieden die op achtergrond lijken—wegoppervlakken, dakvlakken van gebouwen, boomkruinen—worden naar beneden geschroefd, terwijl kleine maar betekenisvolle signalen, zoals reflecties en randen van voertuigen, worden versterkt. Door deze verscherpte details op een gecontroleerde manier weer met de originele features te combineren, produceert deze gegroepeerde spars attention-tak een schoner, meer discriminerend beeld van de scène. Dit maakt het minder waarschijnlijk dat de detector patronen op het asfalt of schaduwen van gebouwen verwart met echte voertuigen.
De scène het mengsel laten kiezen
Het laatste onderdeel van ACFM is een kanaalniveau adaptief weegmechanisme dat per kanaal beslist hoeveel het op elke tak moet vertrouwen. Het vat eerst samen wat er in de hele afbeelding gebeurt en gebruikt vervolgens een lichte bewerking om een set gewichten tussen nul en één af te leiden. Als de scène eenvoudig is en de objecten goed gescheiden, kan het netwerk meer vertrouwen op de multi-scale refinement. Als de scène dicht, rommelig of lawaaierig is, kan het meer nadruk leggen op de attention-tak die achtergrondafleiding onderdrukt. Deze dynamische balans vervangt starre, handgemaakte fusie-regels door een automatische, data-gedreven strategie, waardoor de detector flexibel kan reageren naarmate de omstandigheden van het ene frame naar het andere veranderen.
Scherpere ogen voor droneverkeer
Wanneer het in een populaire detector genaamd GFL werd ingebouwd en getest op drie openbare droneverkeersdatasets, verbeterde ACFM consequent de detectiescores, vooral op uitdagende sets met veel kleine, overlappende voertuigen. De nauwkeurigheidswinst ging gepaard met weinig extra computationele kosten, wat betekent dat het verbeterde systeem nog steeds dicht bij realtime kan werken—een cruciale vereiste voor praktische verkeersbewaking. Voor niet-specialisten is de conclusie eenvoudig: door details te behouden, ruis te onderdrukken en aan te passen hoe features worden gecombineerd op basis van de scène, helpt ACFM drones meer te laten handelen als aandachtige menselijke waarnemers en minder als starre patroonherkenners, en biedt het een betrouwbaardere basis voor toekomstige smart-city- en luchtmonitoringtoepassingen.
Bronvermelding: Liu, S., Zhu, H., Yuan, Z. et al. ACFM: adaptive channel weighted fusion algorithm for improving small object detection performance in UAV traffic. Sci Rep 16, 8366 (2026). https://doi.org/10.1038/s41598-026-39789-6
Trefwoorden: dronetrafic monitoring, detectie van kleine objecten, computer vision, aandachtsmechanismen, multischaal feature-fusie