Clear Sky Science · nl
Door AI aangedreven drones voor bestuiving van dadelpalmen
Robots die dadelpalmen laten bloeien
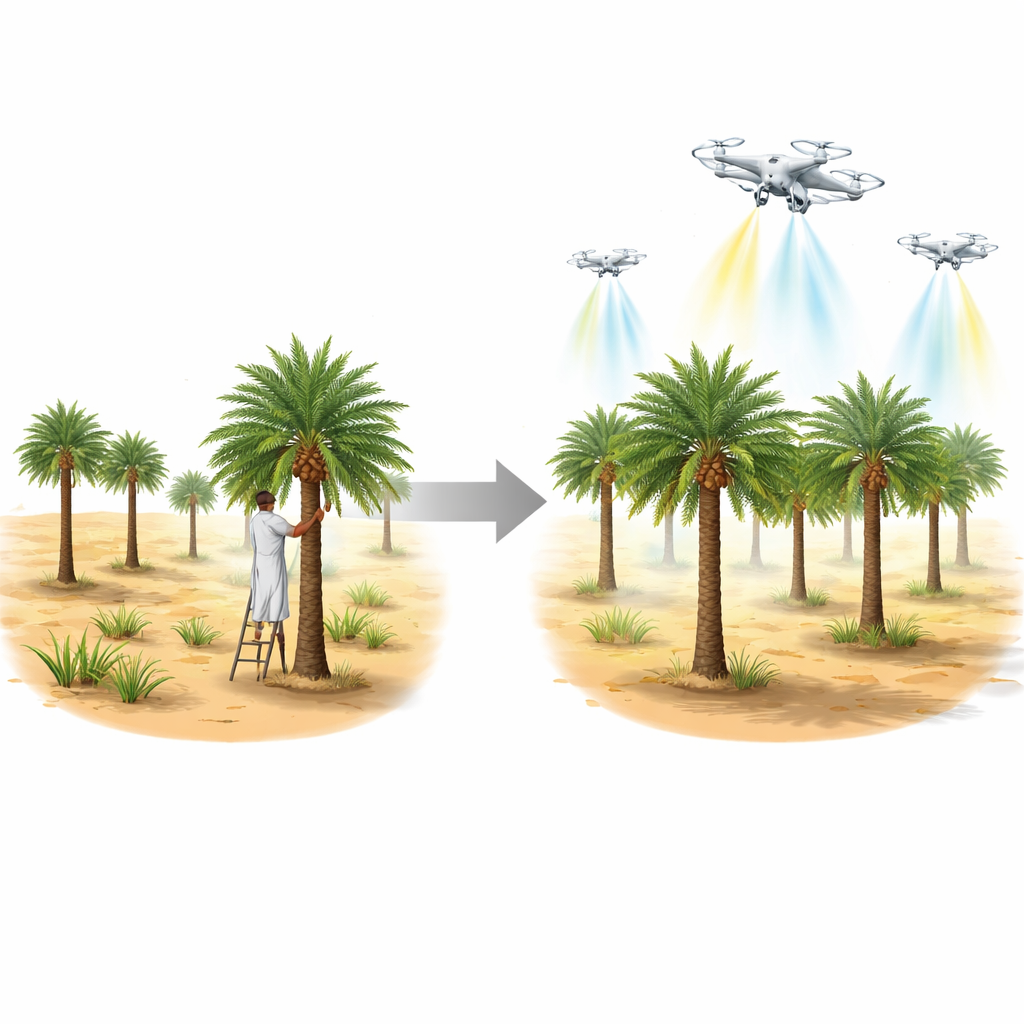
Dadelpalmen zijn een levensader voor veel droge gebieden: ze leveren voedsel, inkomen en cultureel erfgoed. Toch hangt het laten dragen van fruit door elke boom nog steeds af van een arbeidsintensieve taak: arbeiders moeten in de hoge stammen klimmen en met de hand stuifmeel op de bloemen deponeren. Dit artikel onderzoekt hoe kleine vliegende robots, aangestuurd door kunstmatige intelligentie, een groot deel van dat werk kunnen overnemen, waardoor bestuiving sneller, goedkoper en duurzamer wordt voor telers.
Waarom het bestuiven van deze bomen zo moeilijk is
Dadelpalmen groeien in hete, vaak ruwe omgevingen en kunnen zo hoog worden als een meerlaagse gebouw. Mannelijke en vrouwelijke bloemen staan op aparte bomen, wat betekent dat stuifmeel doelbewust moet worden overgebracht. Traditionele methoden—het vastbinden van mannelijke bloemtrossen aan vrouwelijke clusters of het verspreiden van droog stuifmeel—vereisen vakbekwaamheid, precieze timing en grote hoeveelheden stuifmeel. Naarmate boerderijen groeien en bekwaam personeel schaars wordt, schieten deze methoden tekort, vooral omdat de bloei zich over weken kan uitstrekken en meerdere bezoeken aan dezelfde bomen vereist. Klimaatverandering en het verlies van natuurlijke bestuivers verhogen de druk nog verder.
Drones in de boomgaard
Recente vooruitgang in kleine vliegmachines en slimme camera’s heeft de deur geopend naar een nieuwe aanpak: door drones ondersteunde bestuiving. In deze studie ontwerpen en modelleren de auteurs een dronesysteem dat de bloeiende delen van dadelpalmen kan vinden en ze kan besproeien met een fijne nevel van stuifmeeloplossing. Ze onderzoeken twee modi. In de semi-autonome modus lanceert en stuurt een menselijke operator de drone naar elke boom, terwijl software aan boord de bloemen spot en de sproeier regelt. In de volledig autonome modus volgt de drone een geprogrammeerde vluchtbaan, controleert zijn eigen batterij en sensoren, ontwijkt obstakels, detecteert bloemen, positioneert zich, sproeit en keert met weinig menselijke tussenkomst terug naar de basis. Beide benaderingen hebben tot doel uren klimmen te vervangen door minuten van geleid vliegen.
Drones leren bloemen te zien
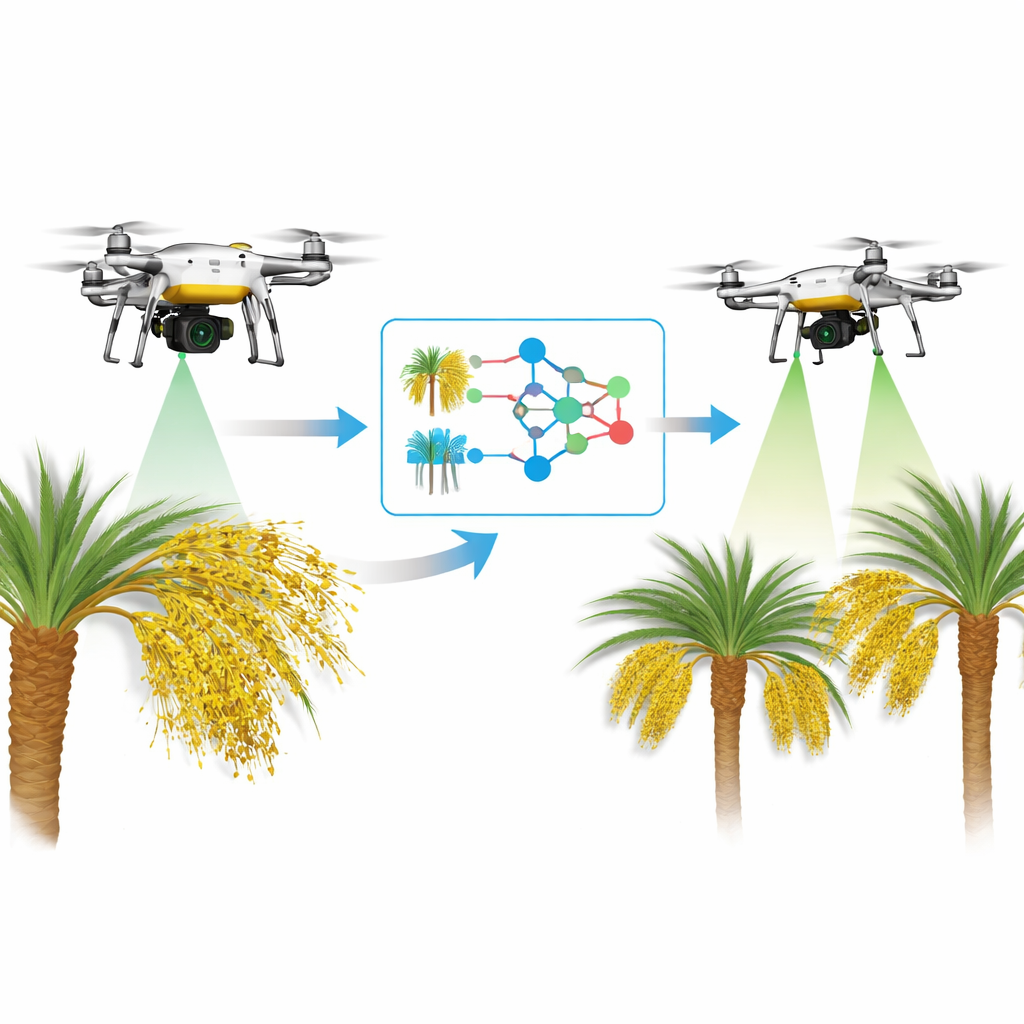
Om dit mogelijk te maken moeten de drones de bloemtrossen duidelijk “zien” zodat ze weten waar en wanneer ze moeten bestuiven. De onderzoekers bouwden een grote beelddataset van palmkruinen, vastgelegd onder verschillende lichtomstandigheden, hoeken en groeistadia. Experts tekenden vervolgens kaders rond de bloemtrossen zodat computer-visionprogramma’s ze konden leren herkennen. Het team trainde moderne “you only look once” (YOLO)-modellen—snelle deep-learningsystemen die objecten in realtime kunnen detecteren—op deze dataset. Ze experimenteerden met meerdere versies en verwante modellen en comprimeerden en optimaliseerden de beste uitvoerders om efficiënt te draaien op een kleine, energiezuinige computergroep op de drone. Na zorgvuldige afstemming kon het systeem videoframes analyseren met meer dan tien beelden per seconde terwijl de detectienauwkeurigheid hoog genoeg bleef om precieze besproeiing te sturen.
Het vliegende hulpje ontwerpen
Naarmate het visiesysteem werd ontwikkeld, ontwierpen de auteurs een quadcopterplatform op maat voor werk in boomgaarden. Ze berekenden hoeveel stuwkracht de motoren en propellers moesten leveren om veilig het frame, de batterij en een liter stuifmeeloplossing te tillen, en hoe lang de drone in de lucht kon blijven voor herladen. Met een typische batterij kan het testplatform ongeveer zes bomen per vlucht bestuiven, waarbij elke boom ruwweg één minuut kost voor de drone om zich te positioneren en alle belangrijke bloemtrossen te besproeien. De studie vergelijkt ook verschillende dronelayouts—vier, zes of acht rotoren—en benadrukt afwegingen tussen wendbaarheid, draaglast, betrouwbaarheid en kosten. Voor grote boerderijen tonen de auteurs aan dat het gebruik van meerdere drones parallel de totale tijd om duizend bomen te bestuiven kan terugbrengen van vele uren met één machine naar slechts een paar uur met een kleine vloot.
Arbeid, stuifmeel en milieu besparen
Een belangrijk voordeel van het systeem is hoe het stuifmeel gebruikt wordt. In plaats van bomen te overspoelen met dikke, poederige wolken, brengt de drone een verdunde vloeibare suspensie precies daar aan waar het nodig is. Volgens de berekeningen van de auteurs en vergelijkingen met bestaande commerciële systemen kan hun ontwerp het stuifmeelgebruik per boom met ongeveer 97 procent verminderen terwijl het effect vergelijkbaar blijft. Tegelijk schatten ze dat de arbeidsbehoefte met ongeveer 80 procent daalt, omdat één operator en een klein aantal drones een groter klimmers-team kunnen vervangen. Hetzelfde platform kan ook worden aangepast voor precieze toediening van meststoffen of pesticiden, waardoor chemisch afval en afspoeling afnemen.
Wat dit betekent voor telers
Het onderzoek bewijst nog niet hoeveel extra opbrengst telers precies zullen krijgen, omdat de studie zich richt op technische prestaties in plaats van langetermijn oogstgegevens. Toch tonen de resultaten aan dat door AI geleide drones betrouwbaar dadelbloemen kunnen vinden, ze kunnen bereiken met een zachte nevel en dit kunnen doen met veel minder arbeid en stuifmeel dan traditionele methoden. Simpel gezegd suggereert dit prototype dat toekomstige boerderijen kunnen vertrouwen op kleine vlootjes slimme vliegende helpers om een van hun meest veeleisende seizoensgebonden taken te verzorgen, waardoor mensen gevrijwaard worden van gevaarlijke klimwerkzaamheden en tegelijkertijd bijgedragen wordt aan betrouwbare oogsten in enkele van de droogste regio’s ter wereld.
Bronvermelding: AlRaeesi, I., El-Khazali, R. AI-enabled drones for date palm pollination. Sci Rep 16, 10158 (2026). https://doi.org/10.1038/s41598-026-39739-2
Trefwoorden: dronen bestuiving, dadelpalmteelt, precisielandbouw, landbouwrobotica, computer vision