Clear Sky Science · nl
Efficiënte laadplanning door coördinatie van elektrische voertuigplatoons en laadstations
Waarom slimmer laden belangrijk is voor alledaagse bestuurders
Nu elektrische voertuigen gangbaarder worden, zal snel en handig opladen net zo belangrijk zijn als het vinden van een tankstation nu. Deze studie onderzoekt wat er gebeurt wanneer niet alleen individuele elektrische auto’s maar ook dicht opeengepakte groepen daarvan, bekend als platoons, dezelfde wegkantladers delen. Door te coördineren hoe deze voertuigen zich verplaatsen en waar ze stoppen om bij te tanken, tonen de auteurs aan dat we verspilde tijd kunnen verminderen, lange wachtrijen bij drukke stations kunnen voorkomen en bestaande laadinfrastructuur beter kunnen benutten.
Gemengd verkeer op de wegen van morgen
Het werk schetst een nabije toekomst met snelwegen waar twee soorten elektrisch verkeer naast elkaar rijden. De ene bestaat uit gewone, door mensen bestuurde auto's waarvan de eigenaren zelf beslissen wanneer en waar ze opladen. De andere bestaat uit georganiseerde konvooien van geautomatiseerde voertuigen—bezorgbussen, robotaxi’s of wagenparken—die met gecoördineerde snelheden samen reizen. Deze platoons besparen energie en vergroten de wegcapaciteit, maar wanneer ze een station binnenrijden kunnen ze meerdere laadpunten tegelijk bezetten en zo de lokale capaciteit snel overweldigen. Traditionele planningsmethoden behandelen elk voertuig als een afzonderlijke, onafhankelijke klant en houden zelden rekening met dit samenklonterings‑effect, dat een soepel netwerk kan veranderen in een systeem vol knelpunten.
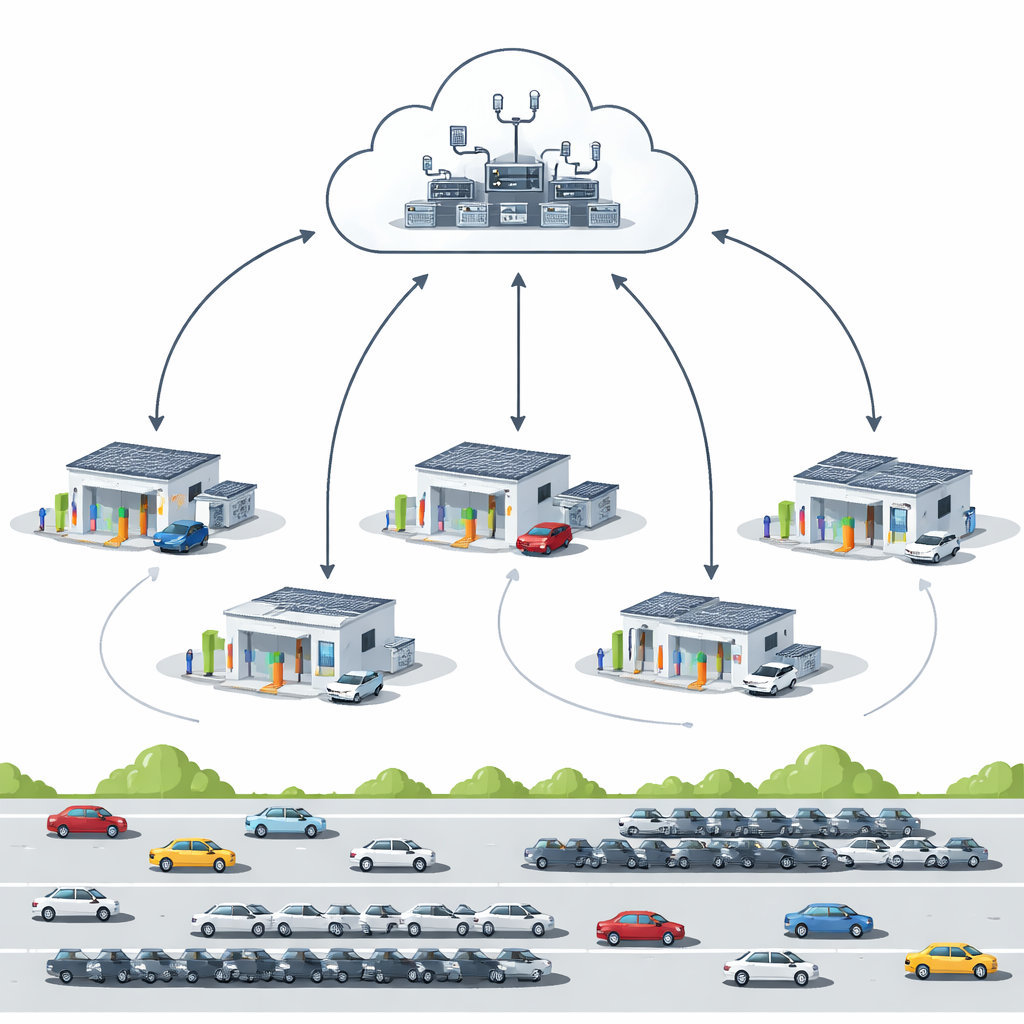
Een digitale verkeersleider voor auto’s en laders
Om dit aan te pakken stellen de auteurs een intelligente verkeersleider voor die in het netwerk zit en communiceert met zowel voertuigen als laadstations. Met voertuig‑naar‑infrastructuurverbindingen vergelijkbaar met huidige mobiele netwerken delen auto's en platoons periodiek eenvoudige informatie zoals resterende batterijenergie, gewenste laadmethode en huidige positie. De dispatcher kent ook de weginfrastructuur, hoe druk elk weggedeelte is en hoeveel vermogen elk laadpaal kan leveren. Met deze gecombineerde gegevens wijst hij elk voertuig of platoon een specifiek station toe en doet hij aanbevelingen voor geschikte rijsnelheden, met als doel de totale tijd die wordt besteed aan rijden naar en gebruiken van een lader te minimaliseren en tegelijkertijd te voorkomen dat een enkel station wordt overbelast.
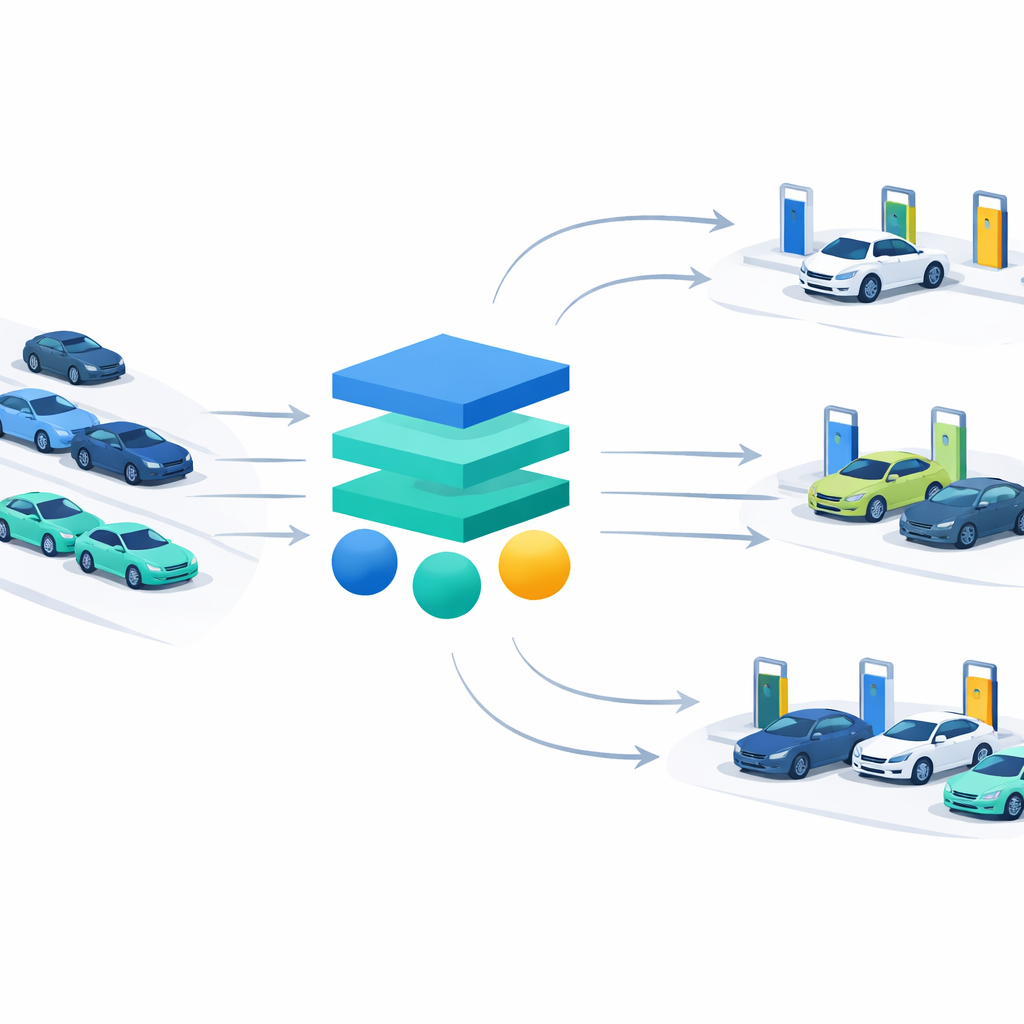
Hoe de slimme planning werkt
Achter de schermen lost het systeem een complex puzzelstuk op: wie moet naar welk station en hoe snel moet elk voertuig of platoon rijden zodat het dat station kan bereiken zonder zonder batterij te komen zitten. Omdat platoons meerdere aansluitingen tegelijk gebruiken, beïnvloeden hun toewijzingen sterk de opties voor iedereen. De auteurs delen deze puzzel op in twee afwisselende fasen. Eerst kiest de dispatcher met behulp van een zoekmethode geïnspireerd door gefaseerde planning, of een snellere gretige verkorting, stationstoewijzingen onder de regels dat geen enkel station zijn aantal aansluitingen mag overschrijden en elk voertuig precies één stop moet kiezen. Ten tweede, met die toewijzingen vast, verplaatst een zwermgeïnspireerde optimalisatieroutine voertuigen en platoons binnen wettelijke snelheidslimieten iets omhoog of omlaag zodat energieverbruik, reistijd en laadtijd gezamenlijk verbeteren. Het proces herhaalt zich vervolgens en verfijnt geleidelijk beide keuzes totdat verdere verbeteringen verwaarloosbaar zijn.
Wat simulaties onthullen over beter laden
Computersimulaties onderzoeken hoe deze gecoördineerde strategie presteert onder uiteenlopende realistische omstandigheden. Vergeleken met eenvoudige regels zoals “ga altijd naar het dichtstbijzijnde vrije station” of rechtlijnige gretige keuzes, vermindert de voorgestelde methode consequent de totale tijd die wordt besteed aan rijden en laden. De voordelen worden vooral duidelijk wanneer er veel platoons zijn of wanneer nabijgelegen stations beperkte capaciteit hebben. De resultaten wijzen op verschillende ontwerpleerpunten: het spreiden van hetzelfde totale aantal aansluitingen over meer stations vermindert doorgaans de totale tijd omdat meer bestuurders een redelijk dicht bijzijnd station kunnen vinden; het verhogen van laadsnelheid verkort voorspelbaar sessies maar werkt het beste in combinatie met slimme planning; en zeer grote platoons, hoewel efficiënt op de weg, kunnen de vertragingen bij stations sterk vergroten tenzij hun laadschema zorgvuldig wordt gecoördineerd.
Wat dit betekent voor toekomstig elektrisch reizen
In alledaagse termen laat de studie zien dat slimmer coördineren—niet alleen meer hardware—elektrisch reizen sneller en betrouwbaarder kan maken. Door konvooien van voertuigen als volwaardige deelnemers in het laadplan te behandelen en zowel te optimaliseren waar ze stoppen als hoe snel ze rijden, vermindert het voorgestelde raamwerk de drukte bij populaire stations en verkort het de gecombineerde rij‑en‑laadtijd. Naarmate het gebruik van EV’s groeit en commerciële wagenparken platooning toepassen, kan zulke gezamenlijke planning steden en wegbeheerders helpen soepelere ritten te leveren zonder eindeloos nieuwe laders toe te voegen, en wijzen op een efficiënter en gebruiksvriendelijker elektrisch wegennet.
Bronvermelding: Qi, L., Wu, B., Li, S. et al. Efficient charging scheduling through coordination of electric vehicle platoons and charging stations. Sci Rep 16, 8773 (2026). https://doi.org/10.1038/s41598-026-39376-9
Trefwoorden: opladen van elektrische voertuigen, voertuigplatooning, slimme mobiliteit, planning van laadstations, verkeersoptimalisatie