Clear Sky Science · nl
Onderzoek naar slaperigheidsdetectie bij UAV-operators gebaseerd op de methode van het random decision forest
Waarom het belangrijk is dat dronepiloten wakker blijven
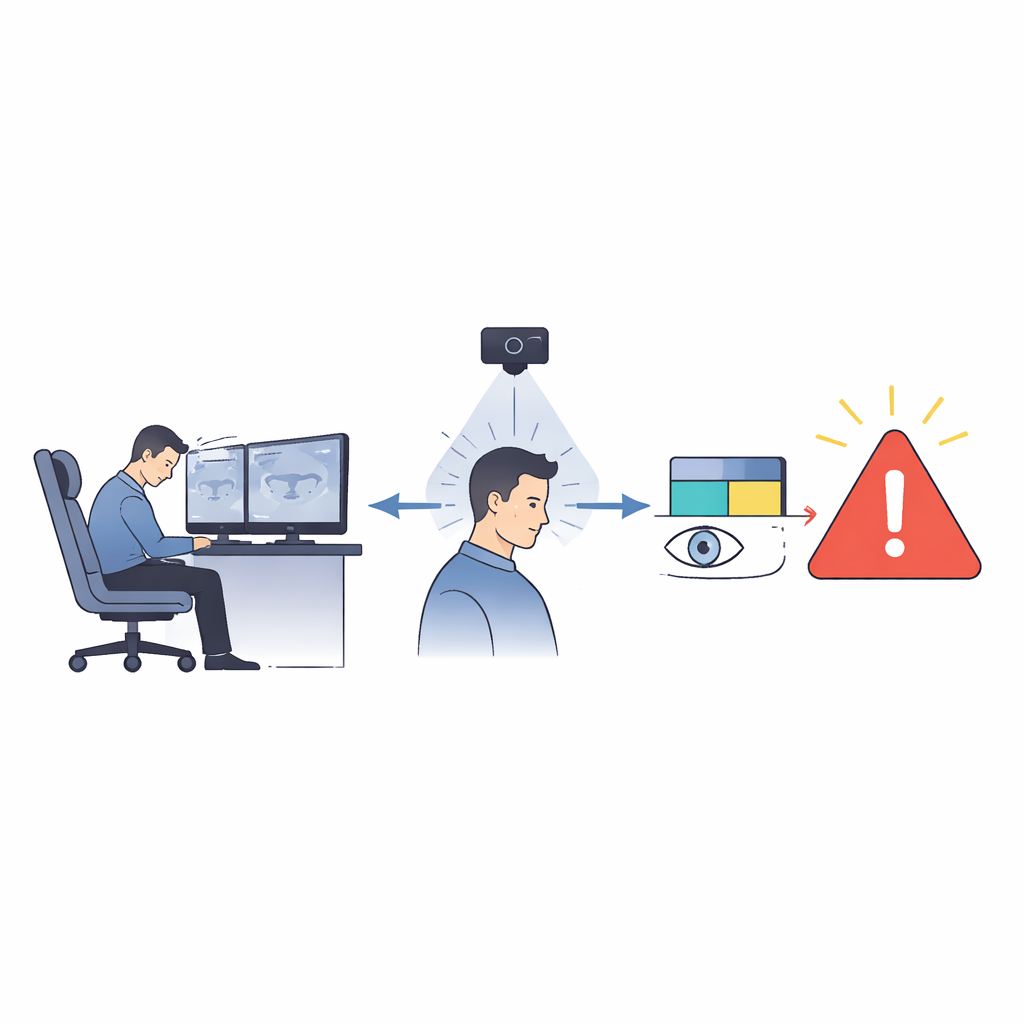
Nu drones steeds meer taken overnemen — van het inspecteren van hoogspanningslijnen tot het ondersteunen van reddingsacties — moeten de mensen die ze vanaf de grond besturen scherp blijven. Lange missies, eentonige schermen en nachtdiensten kunnen de operatoren echter geleidelijk in slaperigheid duwen, waardoor het risico op kostbare of zelfs dodelijke fouten toeneemt. Dit artikel onderzoekt hoe een camerasysteem het gezicht van een piloot in realtime kan volgen en met een transparante machinelearningmethode kan beslissen wanneer iemand te slaperig is om veilig te vliegen.
Drie manieren om een slaperige operator te herkennen
De auteurs beginnen met het schetsen van drie brede groepen methoden voor slaperigheidsdetectie. De ene kijkt naar het gedrag van het voertuig: slingeren binnen een rijstrook, van koers raken of meer bedieningsfouten maken. Een andere bewaakt signalen van het lichaam en de hersenen, zoals hersengolven, hartritme, ademhaling of huidgeleiding. Deze benaderingen kunnen nauwkeurig zijn maar vereisen vaak dat mensen sensoren dragen, wat oncomfortabel en onpraktisch kan zijn in echte controleruimtes. De derde groep observeert uitwendig gedrag: hoe vaak iemand knippert, hoe lang de ogen gesloten blijven, of iemand geeuwt en hoe het hoofd kantelt. Omdat camera’s deze informatie kunnen vastleggen zonder de operator aan te raken, zijn gedragsgebaseerde methoden vooral aantrekkelijk voor drone-controlecentra.
Tekens van het gezicht lezen
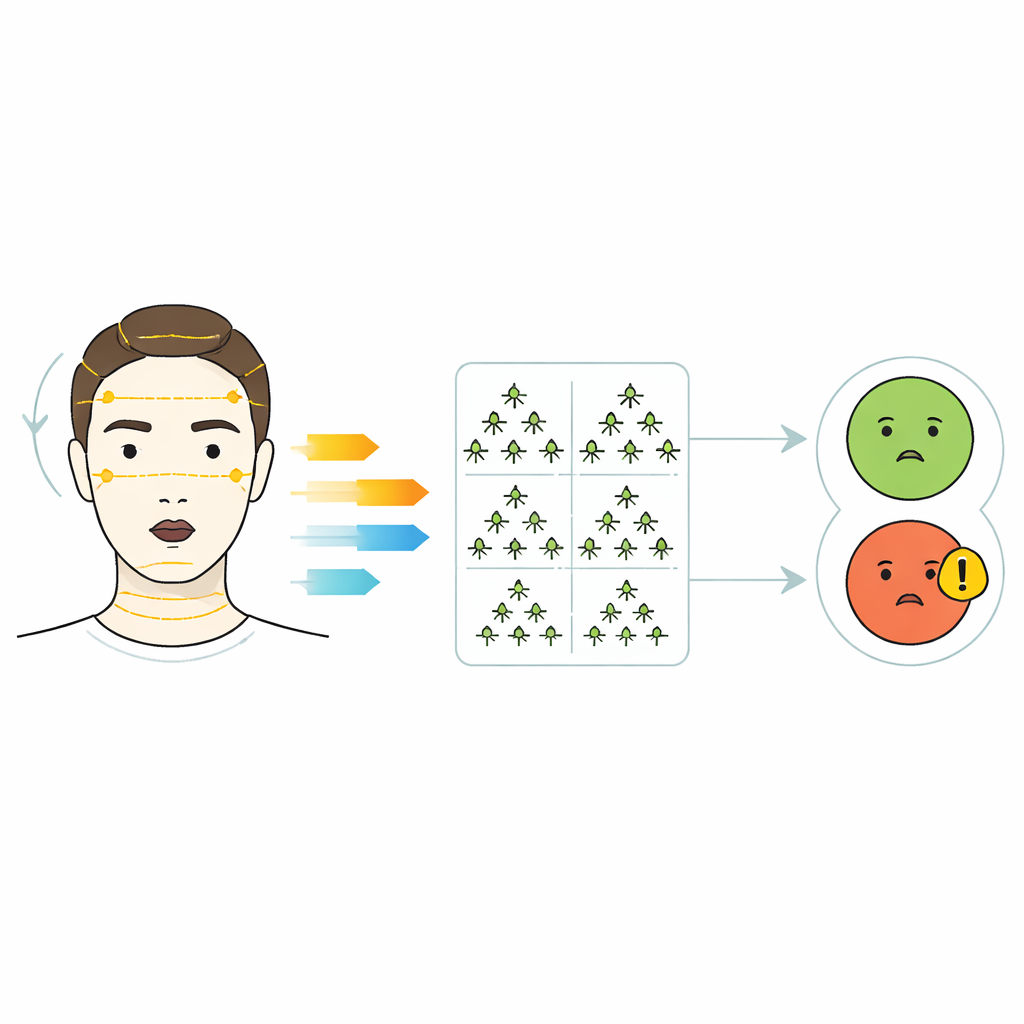
Het in deze studie ontwikkelde systeem richt zich op een handvol gezichtskenmerken die uit eerdere onderzoeken met slaperigheid zijn verbonden. Een computer-visionbibliotheek volgt 3D-punten op het gezicht van de operator in een live videofeed. Vanuit deze herkenningspunten berekent het programma de “eye aspect ratio” om te bepalen hoe open de ogen zijn, het aandeel van de tijd dat de ogen grotendeels gesloten blijven over een minuut (een bekende maat genaamd PERCLOS), hoe wijd de mond open gaat en hoe ver het hoofd naar voren, achteren of opzij helt. De software draait snel genoeg op consumentenhardware om bijna realtime feedback te geven en logt ook alle metingen voor latere analyse.
Een eenvoudige regel met een slimme back-up
Om te bepalen of een piloot slaperig is, combineren de auteurs een vertrouwde regel met een flexibeler model. PERCLOS, dat sterke steun geniet in slaap- en veiligheidsonderzoek, fungeert als de primaire poortwachter: zeer lage waarden wijzen op waakzaamheid, zeer hoge waarden op slaperigheid. Wanneer PERCLOS in een tussengebied valt, schakelt het systeem over naar een random-forest-classifier die oogopening, mondopening en hoofdhelling samen bekijkt. Een random forest is een verzameling van veel kleine beslisbomen, die elk stemmen over de toestand; hun gezamenlijke stem bepaalt de uitkomst. Het systeem maakt ook beslissingen gladgestreken over een kort tijdvenster, zodat één afwijkend frame geen onnodig alarm veroorzaakt.
Inzien wat het model denkt
In tegenstelling tot veel deep-learning-systemen die als ondoorzichtige “black boxes” functioneren, kan een random forest worden onderzocht om te laten zien hoe het tot beslissingen komt. De auteurs trainden hun model op een veelgebruikt videodataset voor slaperigheid bij het rijden en testten het zowel op achtergehouden proefpersonen uit die set als op een aparte database. De prestaties waren solide, waarbij het systeem eerder geneigd was een vals alarm te geven dan een echt slaperige operator te missen — een veiligere afweging in de luchtvaart. Door te plotten hoe het voorspelde risico verandert wanneer elke eigenschap varieert, laten ze bijvoorbeeld zien dat zeer kleine oogopeningen het model sterk naar een oordeel van slaperigheid duwen, terwijl extreme hoofdhellingen pas verdacht worden boven een bepaalde hoek. Een analyse van kenmerkbelang bevestigt dat oogopenheid het oordeel van het model overwegend bepaalt, met mondopening en hoofdhelling als ondersteunende factoren.
Wat dit betekent voor veiligere dronevluchten
De studie concludeert dat een interpreteerbaar gezichtsmonitoringsysteem, gestoeld op een goed gevalideerde maat voor ooglidsluiting en ondersteund door een random forest, betrouwbaar slaperigheid bij drone-operators kan signaleren zonder dat ze aan medische instrumenten gekoppeld hoeven te worden. Tegelijkertijd maakt het transparante model vooringenomenheden en lacunes in de trainingsdata zichtbaar, wat aanwijzingen geeft voor hoe toekomstige systemen moeten worden verbeterd — bijvoorbeeld door meer gevarieerde proefpersonen, lichtomstandigheden en extra signalen van de drone zelf toe te voegen. Simpel gezegd toont dit werk een weg naar cockpitachtige veiligheidsmonitoring voor remote pilots die zowel praktisch inzetbaar als controleerbaar is, waardoor organisaties het vertrouwen en de technologie die hun bemanningen bewaakt, kunnen aanscherpen en verfijnen.
Bronvermelding: Wojtowicz, K., Wojciechowski, P. & Panasiewicz, A. Research on drowsiness detection in UAV operators based on the random decision forest method. Sci Rep 16, 9726 (2026). https://doi.org/10.1038/s41598-026-39195-y
Trefwoorden: slaperigheidsdetectie, drone-operators, gezichtsmonitoring, random forest, vluchtveiligheid