Clear Sky Science · nl
Onderzoek naar intelligente herkenningsmethode voor mechanische onderdelen met hoge feature‑overeenkomst in industriële omgevingen
Waarom het herkennen van bijna identieke onderdelen belangrijk is
Moderne fabrieken vertrouwen op robots om duizenden kleine metalen onderdelen te vinden, op te pakken en te monteren. Veel van die onderdelen — tandwielen, kogellagers, tandkransen, moeren en schroeven — lijken verwarrend veel op elkaar, zeker bij harde verlichting of wanneer ze over elkaar liggen op een transportband. Als een robot het ene onderdeel voor het andere aanziet, kan dat leiden tot verstoppingen, defecten of zelfs beschadigde machines. Deze studie behandelt een schijnbaar eenvoudige vraag met grote industriële gevolgen: hoe kan een compact, snel zichtssysteem in echte werkomstandigheden betrouwbaar bijna identieke onderdelen uit elkaar houden?
Uitdagingen voor visiesystemen op de werkvloer
Op een fabrieksvloer hebben camera’s zelden het schone zicht dat je in demonstratievideo’s ziet. De verlichting is ongelijk, wat sterke reflecties op glanzend metaal en diepe schaduwen elders veroorzaakt. Onderdelen worden in bakken gegooid of verspreid op banden en verbergen elkaar vaak deels. Bovendien delen veel metalen componenten vergelijkbare vormen, kleuren en texturen, waardoor er maar weinig duidelijke visuele aanwijzingen overblijven. Traditionele software die templates of handgemaakte features gebruikt, faalt vaak onder deze omstandigheden: hij is traag, kwetsbaar bij veranderende verlichting en werkt vaak niet wanneer onderdelen overlappen of onverwacht gedraaid zijn.
Bouwen op snelle one‑shot detectors
In recente jaren is een familie van AI‑modellen genaamd YOLO (You Only Look Once) populair geworden voor het detecteren van objecten in afbeeldingen in één snelle doorloop. YOLOv8, een van de recentere versies, biedt al een goede balans tussen nauwkeurigheid en snelheid en kan in realtime draaien. Wanneer onderdelen elkaar echter bijna spiegelen, kan zelfs YOLOv8 subtiele aanwijzingen missen of onnauwkeurige kaders trekken. Eerdere pogingen om YOLO‑modellen te verkleinen voor kleine apparaten sneden vaak in parameters, maar verzwakten daardoor ook het vermogen om fijne details te representeren — precies wat nodig is om sterk gelijkende mechanische onderdelen te onderscheiden.
Een slanker maar scherper detectienetwerk
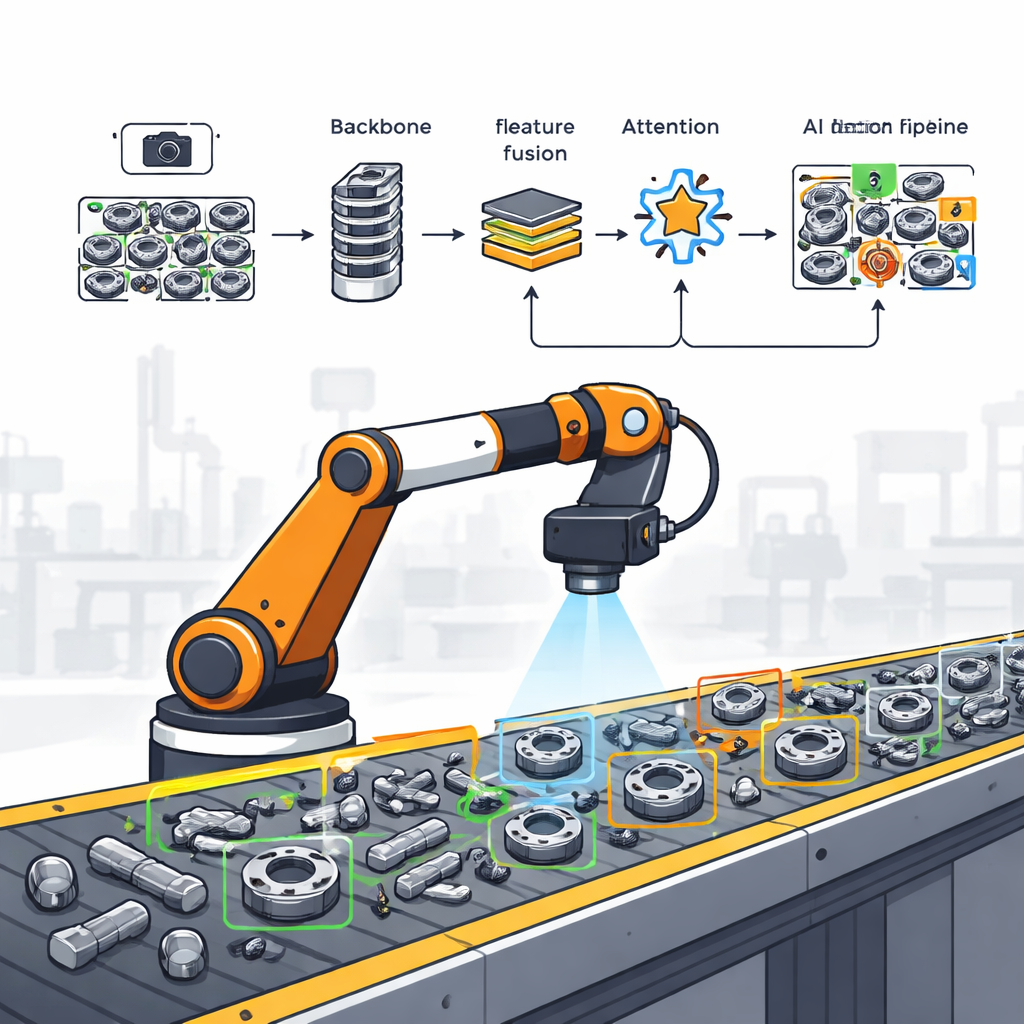
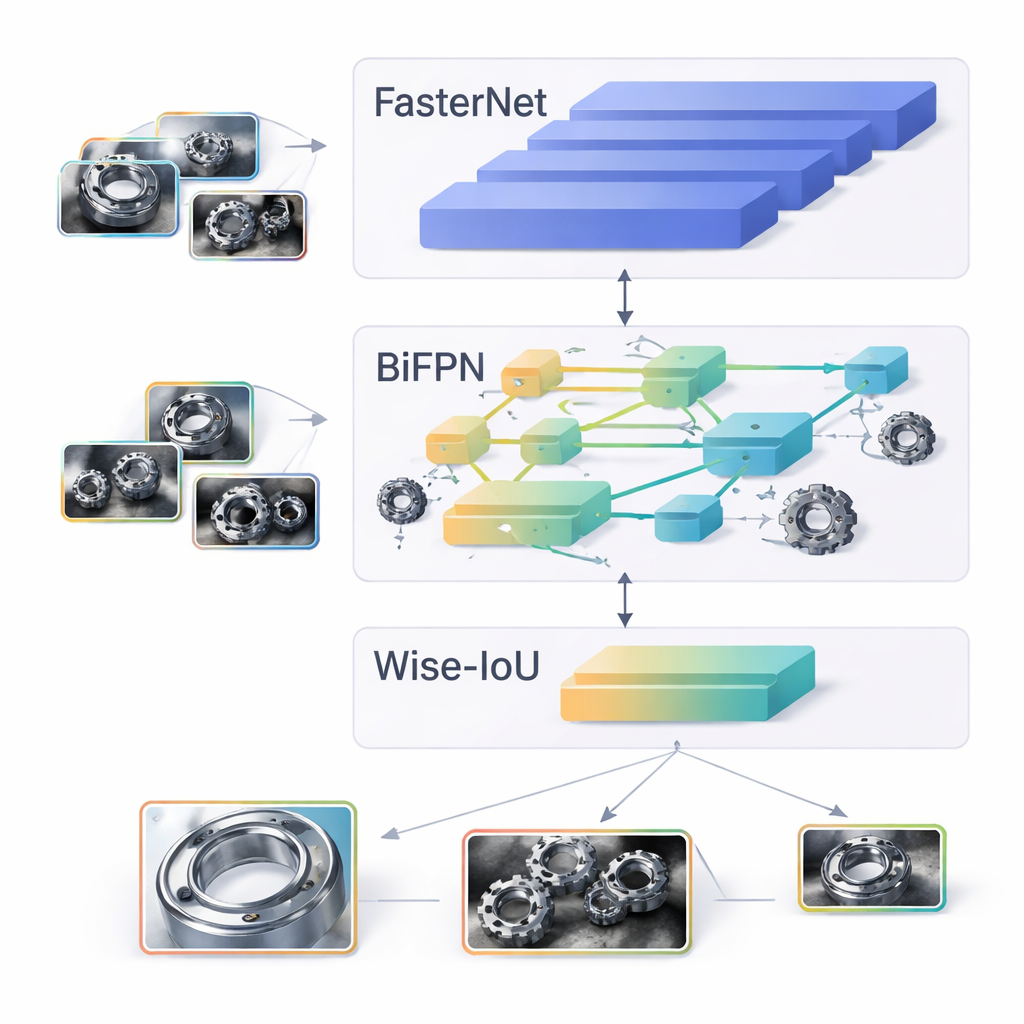
De auteurs stellen een verbeterde versie voor van het kleinste YOLOv8‑model, YOLOv8n, specifiek afgestemd op verwarrende industriële onderdelen en op hardware met beperkte rekenkracht. Ten eerste vervangen ze de standaardkern van het netwerk door een nieuwere opzet genaamd FasterNet, die een "gedeeltelijke" convolutie‑truc gebruikt om bij elke stap alleen op de meest nuttige regio’s van de afbeelding te werken. Dit vermindert herhaald werk in het geheugen zonder belangrijke visuele informatie te verliezen. Ten tweede herontwerpen ze de middelste "nek" van het netwerk naar een bidirectionele feature‑piramide (BiFPN), die informatie zowel van grove, globale weergaven naar fijne details laat stromen als van fijne details terug omhoog, zodat kleine, deels verborgen onderdelen profiteren van context en omgekeerd.
Het netwerk leren slechte aanwijzingen te negeren
Buiten de netwerkarchitectuur heeft ook de manier waarop het netwerk zijn interne instellingen leert — gestuurd door een loss‑functie — grote invloed op waar het op let. Standaard trainingsmethoden behandelen alle voorbeelden min of meer gelijk, wat betekent dat trainingsboxes van lage kwaliteit (slecht uitgelijnd of ambigu) het model kunnen misleiden. De auteurs vervangen de gebruikelijke box‑matchingsregel door een methode genaamd Wise‑IoU. Simpel gezegd scoort deze aanpak elk trainingsvoorbeeld niet alleen op overlap, maar ook op hoezeer het een "uitbijter" is, en dempt zo stilletjes de invloed van onbetrouwbare voorbeelden. In de loop van de tijd leert het systeem voornamelijk van duidelijke, goed gelabelde voorbeelden, wat leidt tot strakkere en betrouwbaardere detectiekaders, vooral wanneer onderdelen overlappen of onder moeilijke verlichting verschijnen.
Het systeem op de proef stellen
Om hun ontwerp te evalueren bouwde het team een eigen beeldverzameling van zes veelvoorkomende mechanische onderdelen, elk 1.250 keer vastgelegd onder verschillende lichtniveaus en met uiteenlopende mate van onderlinge blokkering. Ze vergeleken hun verbeterde model met de standaard YOLOv8n en meerdere andere lichtgewicht detectors. Het nieuwe systeem behaalde een hogere algehele detectiekwaliteit terwijl het minder dan tweederde van de rekencapaciteit gebruikte en het aantal parameters met ongeveer 42% verminderde. In het bijzonder verhoogde het een belangrijke maatstaf, mean average precision bij een gangbare drempel, met 1,5 procentpunt, terwijl het nog steeds efficiënt genoeg draaide voor realtime gebruik op bescheiden hardware.
Wat dit betekent voor slimme fabrieken
Concreet laat de studie zien dat fabriekrobots zowel slimmer als zuiniger kunnen worden. Met de herontworpen netwerkkern, een slimmer feature‑fusieontwerp en een selectiever leerprincipe kan een klein AI‑model betrouwbaarder onderscheid maken tussen sterk gelijkende tandwielen, lagers en andere onderdelen in rommelige, realistische scènes, zelfs bij slechte verlichting en overlap. Deze combinatie van hogere nauwkeurigheid en lagere rekenbelasting maakt het gemakkelijker om robuuste visiesystemen op goedkope edge‑apparaten te implementeren, wat de weg vrijmaakt voor flexibelere, volledig geautomatiseerde productielijnen zonder de noodzaak van enorme servers of perfect gecontroleerde omgevingen.
Bronvermelding: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Trefwoorden: industriële objectdetectie, mechanische onderdelen, lichtgewicht deep learning, YOLOv8, fabrieksautomatisering