Clear Sky Science · nl
Bewegingssnelheid van een autonome prothetische ledemaat beïnvloedt belichaming, bruikbaarheid en sociale robotkenmerken in virtual reality
Waarom de manier waarop een robotarm beweegt echt uitmaakt
Robotic prosthetische ledematen worden elk jaar capabeler en beloven niet alleen om beweging na verlies van een ledemaat te herstellen, maar ook aan te voelen als een natuurlijk deel van het lichaam. Toch is één ogenschijnlijk eenvoudige vraag onvoldoende onderzocht: verandert de snelheid waarmee een autonome prothesearm beweegt hoe "natuurlijk", veilig en bruikbaar deze aanvoelt voor de drager? Deze studie gebruikte virtual reality om te onderzoeken hoe verschillende bewegingssnelheden het gevoel beïnvloeden dat een robotarm bij iemand hoort, namens die persoon reageert en zich gedraagt als een betrouwbare partner in plaats van een schokkerige machine.
Een virtuele robotarm passen
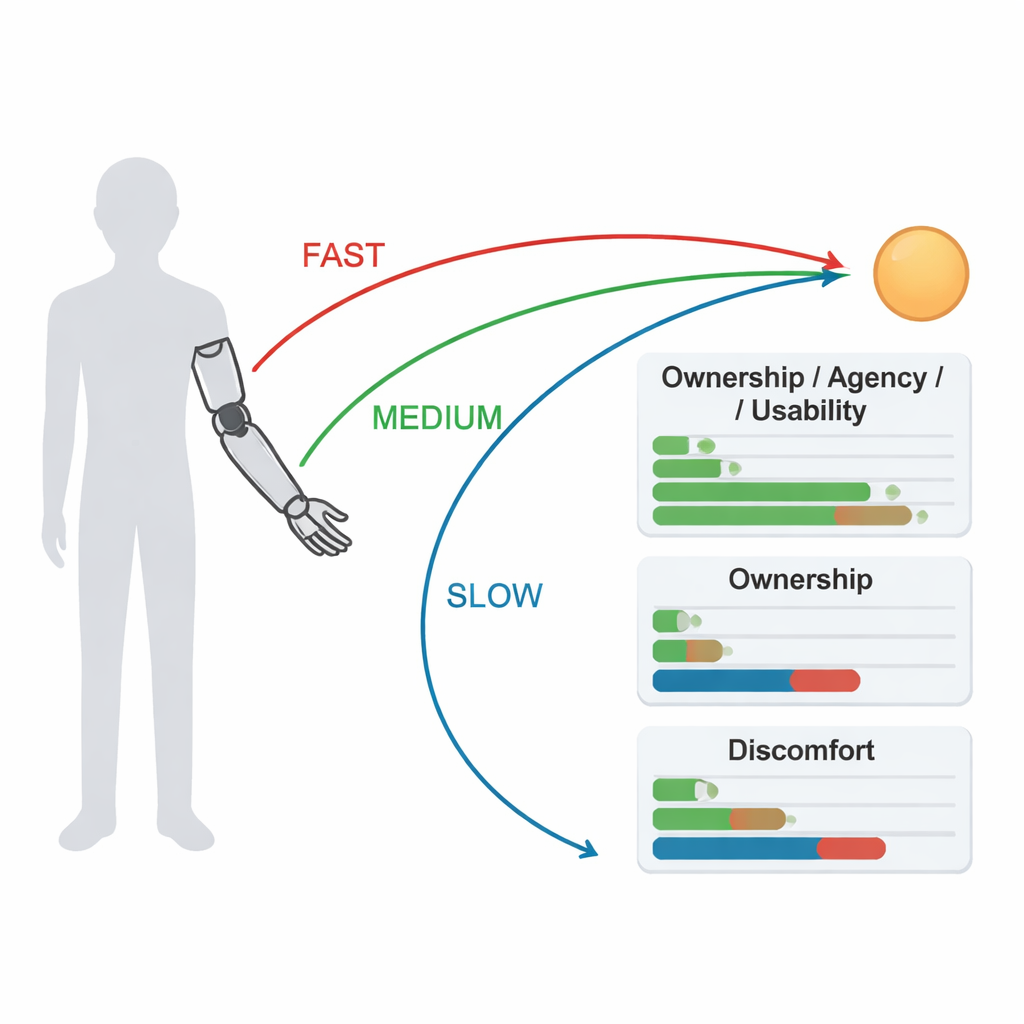
Om deze vraag te onderzoeken plaatsten de onderzoekers vrijwilligers in een meeslepende virtual reality-omgeving en gaven hen een digitaal lichaam met een geamputeerde linker onderarm. In de virtuele wereld werd het ontbrekende deel van de arm vervangen door een gestroomlijnde robotonderarm die uit zichzelf kon buigen. Deelnemers bestuurden hun bovenarm en schouder, maar wanneer hun virtuele elleboog dicht genoeg bij een gloeiend doel kwam, zwaaide de prothetische onderarm automatisch naar binnen om de reikbeweging te voltooien. De beweging volgde een vloeiend "minimum-jerk" pad, een zacht krommende baan waarvan bekend is dat die op natuurlijke menselijke beweging lijkt.

Zes verschillende snelheden, één eenvoudige taak
De belangrijkste variatie was dat de automatische buiging van de prothetische onderarm heel snel of juist heel langzaam kon zijn. Het team testte zes bewegingsduurwaarden, van een razende 125 milliseconden tot een ontspannen 4 seconden, met meerdere tussentijden. In elke snelheidsconditie voerden vrijwilligers een reeks reikproeven uit en probeerden ze zo snel mogelijk op opduikende doelen te tikken. Na elk blok proefnemingen beoordeelden ze hoe sterk ze voelden dat de arm van henzelf was (lichaamseigendom), in hoeverre ze voelden dat de bewegingen "hun" bewegingen waren (gevoel van actievoeren), hoe bruikbaar het systeem was en hoe de arm scoorde op robotachtige sociale eigenschappen zoals bekwaamheid, warmte en ongemak. De onderzoekers maten ook hoe snel mensen hun echte bovenarm naar het doel bewogen voordat de prothese het overnam.
Gemiddelde snelheid voelt het meest als onderdeel van het lichaam
De resultaten schetsten een duidelijk beeld: een gemiddelde bewegingsduur van ongeveer één seconde leverde het sterkste gevoel van lichaams-eigendom en agentheid op, evenals de hoogste bruikbaarheidscores. Wanneer de prothese veel sneller (125 ms) of veel langzamer (4 s) bewoog, voelden mensen minder dat deze deel van hun lichaam was en minder dat hij namens hen handelde. Een iets snellere beweging van een halve seconde presteerde ook goed en behield hoge scores voor eigendom en agentie vergeleken met de uitersten. Dit patroon suggereert dat er een sweet spot in snelheid bestaat waarbij een autonome ledemaat zowel natuurlijk als behulpzaam aanvoelt, en dat te snel of te traag bewegen het voor de hersenen moeilijker maakt het apparaat in het lichaamsbeeld te integreren.
Comfort, bekwaamheid en hoe mensen zich aanpassen
De manier waarop de snelheid van de arm diens "persoonlijkheid" vormde was even veelzeggend. Bewegingen met matige snelheid werden beoordeeld als competenter dan de langzaamste bewegingen, terwijl de allersnelste bewegingen het meeste ongemak veroorzaakten, wat echo’s geeft van eerdere bevindingen met op zichzelf staande robots. Interessant genoeg veranderden beoordelingen van warmte—ongeveer hoe vriendelijk en benaderbaar de arm leek—niet veel met de snelheid. Mensen pasten ook subtiel hun eigen gedrag aan: wanneer de prothese langzaam bewoog, neigden ze hun echte bovenarm langzamer naar het doel te bewegen, alsof ze onbewust het tempo van de robot imiteerden. Deze aanpassing wijst erop dat zodra een autonome ledemaat gedeeltelijk belichaamd is, de gebruiker zijn eigen bewegingen kan afstemmen om beter met het apparaat te coördineren.
Wat dit betekent voor toekomstige prothetische ledematen
Voor niet-experts is de conclusie helder: hoe snel een autonome prothese beweegt is niet slechts een technische instelling; het bepaalt rechtstreeks of de gebruiker het apparaat als echt deel van zichzelf ervaart en of het als veilig en bekwaam aanvoelt. In deze virtual reality-studie met gezonde deelnemers vonden bewegingen van ongeveer één seconde het beste evenwicht: ze maximaliseerden gevoelens van eigendom, controle en bruikbaarheid en vermeden het gevoel van onbehagen dat ultra-snelle bewegingen oproepen. Naarmate geavanceerdere protheses en draagbare robotapparaten het dagelijks leven binnentreden, kan het zorgvuldig afstemmen van bewegingssnelheid—en het binnen een menselijk-achtig, comfortabel bereik houden—net zo belangrijk blijken als het toevoegen van meer sensoren of slimmere algoritmen als we willen dat deze apparaten zowel effectieve hulpmiddelen als daadwerkelijk leefbare verlengstukken van het lichaam worden.
Bronvermelding: Hapuarachchi, H., Inoue, Y., Shigemasu, H. et al. Movement speed of an autonomous prosthetic limb shapes embodiment, usability and robotic social attributes in virtual reality. Sci Rep 16, 7750 (2026). https://doi.org/10.1038/s41598-026-38977-8
Trefwoorden: prothetische ledematen, virtual reality, belichaming, mens-robot interactie, bewegingssnelheid