Clear Sky Science · nl
Reconstructiestrategie voor voertuigenbaangegevens voor videorecognitie op basis van een tweestapsmethode van interpolatie en filtering
Waarom het opschonen van digitale verkeersgegevens echt belangrijk is
Elke keer dat een verkeerscamera auto’s observeert die een kruispunt passeren, ontstaat er een verborgen stroom gegevens die beschrijft waar elk voertuig naartoe gaat, hoe snel het beweegt en hoe het versnelt of remt. Deze informatie is van groot belang voor veiligere wegen, slimmere verkeerslichten en toekomstige zelfrijdende auto’s. Maar in de praktijk zijn die gegevens rommelig: auto’s worden verborgen achter vrachtwagens, koplampen schitteren bij regen, en computerzichtsystemen maken fouten. Deze studie pakt een zeer praktische vraag aan: hoe kunnen we die gebrekkige videogegevens omzetten in een betrouwbaar verslag van hoe voertuigen daadwerkelijk bewegen?
Wanneer camera’s verkeerd inschatten hoe auto’s bewegen
Videogebaseerde tracking is aantrekkelijk omdat het goedkoop, niet-intrusief en geschikt voor grote gebieden is. Toch zit de ruwe output vol met twee hoofdproblemen. Het eerste zijn duidelijke fouten, zoals een auto die lijkt terug te springen, plotseling van snelwegsnelheid stopt, of onmogelijke pieken in versnelling toont. Deze ontstaan meestal door occlusie, bewegingsonscherpte of doordat de volgbibliotheek het voertuig kort verliest. Het tweede probleem is willekeurige jitter — kleine, snelle trillingen in de gerapporteerde positie. Wanneer snelheid en versnelling uit die posities worden berekend, worden die trillingen uitvergroot en lijkt normaal rijgedrag onregelmatig. Als dit niet wordt gecorrigeerd, kunnen deze problemen verkeersmodellen met meer dan 40 procent vertekenen, wat op zijn beurt veiligheidsstudies en autonome rijsystemen kan misleiden.
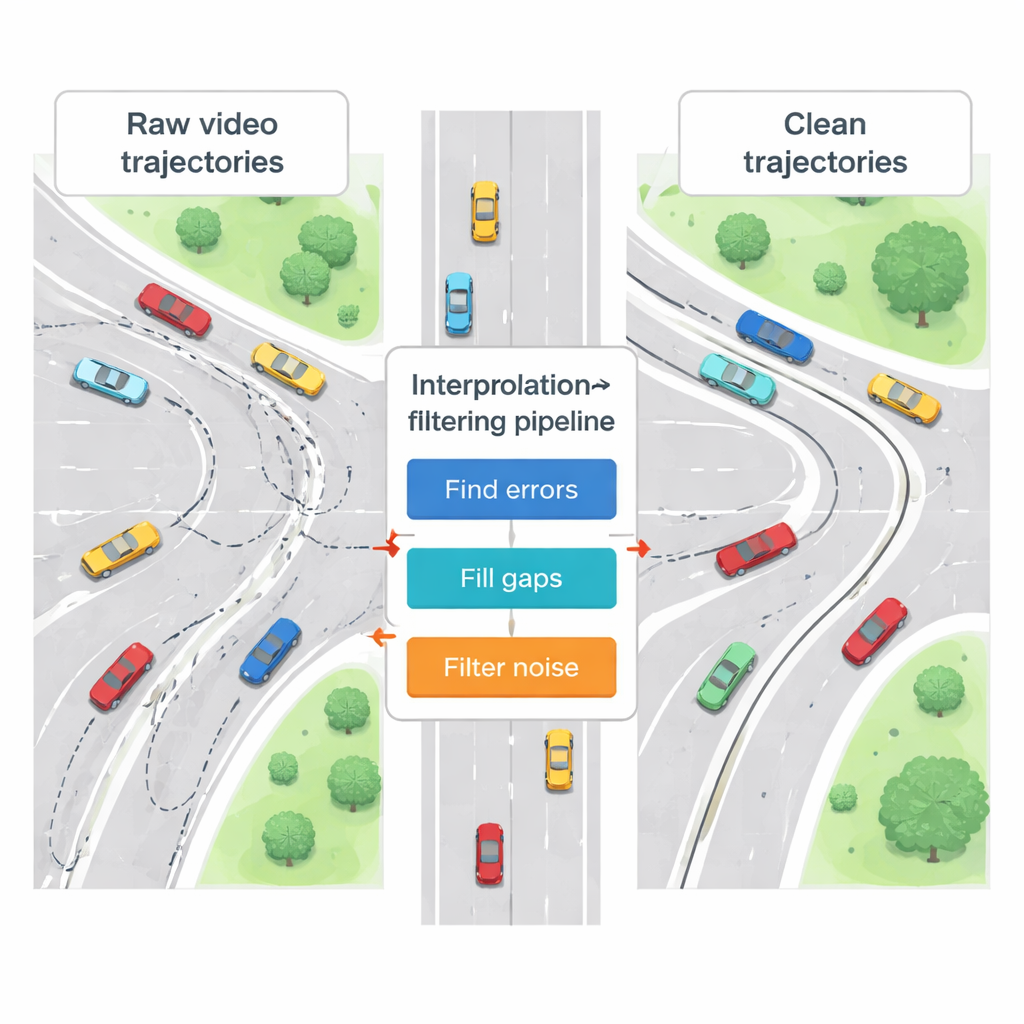
Een tweestaps schoonmaakplan
Om deze schade te herstellen, stellen de auteurs een tweestaps-reconstructiestrategie voor die werkt als een zorgvuldige digitale monteur. Stap één richt zich op duidelijke fouten: de methode doorzoekt het verloop van elk voertuig op snelheden en versnellingen die eenvoudige fysieke grenzen overschrijden, zoals extreem hoge jerk (zeer plotselinge veranderingen in versnelling) of versnelling boven wat een echte auto en bestuurder kunnen verdragen. Zodra deze uitbijters zijn gevonden, worden ze vervangen met wiskundige hulpmiddelen die interpolatie heten, waarbij ontbrekende waarden worden geschat op basis van nabijgelegen, betrouwbaardere punten. De studie vergelijkt meerdere interpolatievarianten en constateert dat een aanpak genaamd Hermite-interpolatie de natuurlijke vorm van de baan beter behoudt dan de meer traditionele Lagrange-methode, vooral wanneer de beweging complex is.
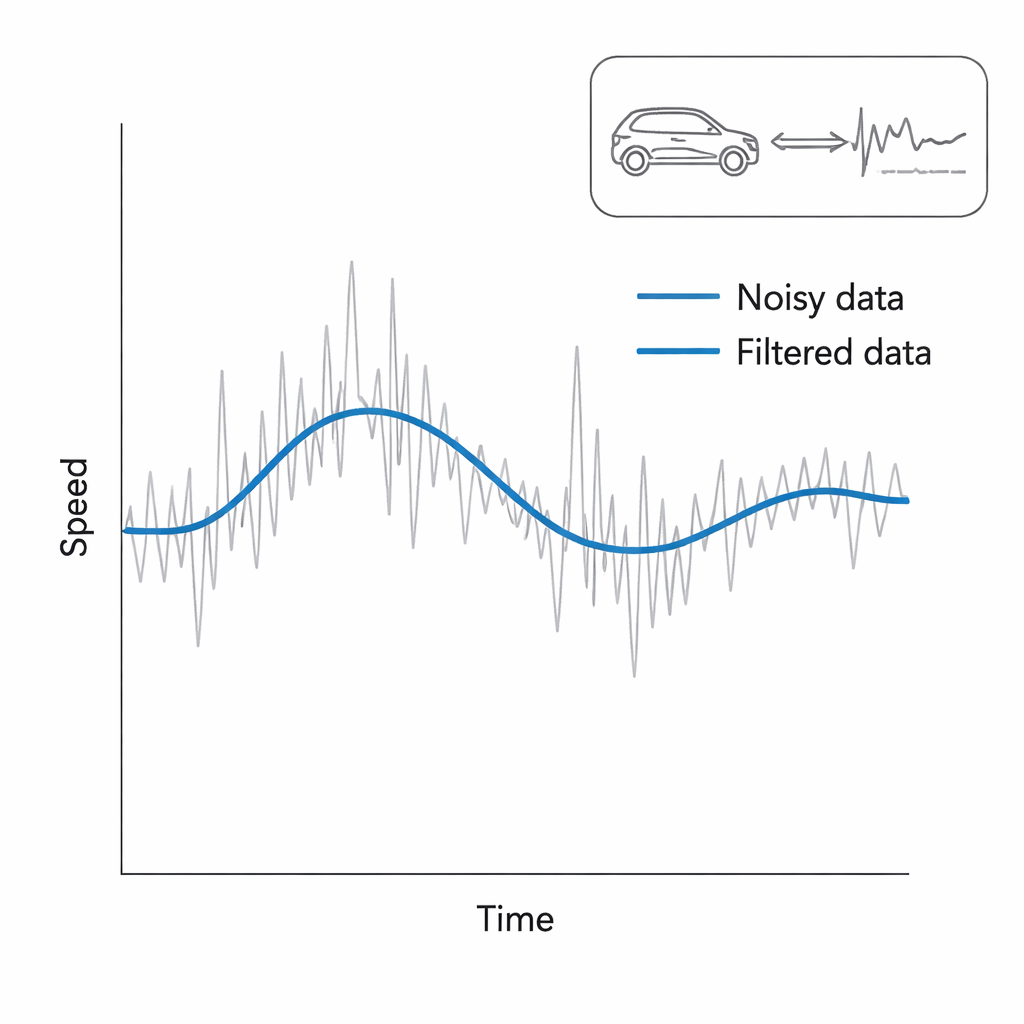
Het digitale ritje gladstrijken
Stap twee pakt het subtielere probleem van ruis aan. Zelfs nadat grove fouten zijn gecorrigeerd, kunnen de resterende spoorlijnen er nog lichtjes schokkerig uitzien. Hier testen de onderzoekers twee manieren om de gegevens te gladstrijken: een verfijnde voortschrijdende gemiddelde-methode die recentere punten meer gewicht geeft, en een statistische techniek bekend als de Kalman-filter, die continu zijn beste schatting van de werkelijke positie en snelheid van een auto bijwerkt naarmate nieuwe metingen binnenkomen. Beide technieken dempen de jitter, maar de Kalman-filter doet beter werk in het volgen van echte rijveranderingen — bijvoorbeeld zacht remmen of een rijstrookwissel — zonder die te vervagen. Het resultaat is een vloeiendere, realistischer beschrijving van hoe elk voertuig zich in de tijd daadwerkelijk gedroeg.
De methode op de proef stellen
Het team past hun raamwerk toe op echte video-opnames van een druk stedelijk kruispunt in Zhengzhou, China, waarbij moderne objectdetectie- en volgsystemen worden gebruikt om voertuigpaden te extraheren. Vervolgens laten ze tientallen verschillende voertuigsporen hun tweestapsproces doorlopen en beoordelen succes met eenvoudige fysieke maatstaven: hoe sterk de versnelling fluctueert en hoe vaak jerk een niveau overschrijdt dat onrealistisch wordt geacht voor personenauto’s. Ze vergelijken de opgeschoonde video-gebaseerde trajecten ook met grondwaarheidsgegevens die rechtstreeks van de boordinstrumenten van een auto zijn opgenomen. Over veel rijpatronen heen — constant kruisen, hard remmen, rijstrookwissels — reduceert de gecombineerde interpolatie-en-filteringstrategie de variabiliteit in versnelling met ongeveer 85 procent en elimineert bijna onwaarschijnlijke jerk-pieken, terwijl de resultaten nauwer aansluiten bij de instrumentgegevens dan verschillende concurrerende methoden.
Wat dit betekent voor alledaags vervoer
In eenvoudige termen laat dit artikel zien hoe je onvolmaakte beelden van gewone verkeerscamera’s kunt omzetten in gegevens waarop ingenieurs en geautomatiseerde voertuigen daadwerkelijk kunnen vertrouwen. Door eerst duidelijke glitches te herstellen en vervolgens ruis zorgvuldig weg te gladstrijken, levert de voorgestelde methode realistische digitale sporen van hoe auto’s bewegen, zonder exotische hardware of grote rekenkracht te vereisen. Dat schonere beeld kan worden gebruikt voor betere afstemming van verkeerslichten, nauwkeurigere simulaties van congestie en veiligere zelfrijdalgoritmen die afhankelijk zijn van begrip van rijgedrag in de echte wereld. Hoewel de studie zich op één stad concentreert en nog niet alle weers- of wegomstandigheden omvat, biedt ze een duidelijk en praktisch pad om bestaande videonetwerken als betrouwbare sensoren te gebruiken voor de volgende generatie intelligente transportsystemen.
Bronvermelding: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Trefwoorden: voertuigtraject, verkeersvideogegevens, gegevensontstorings, intelligente mobiliteit, autonoom rijden