Clear Sky Science · nl
ESO-gebaseerde adaptieve neurale netwerkenregeling voor een quadrotor tegen wind- en ladingstoringen
Drones stabiel houden in een rommelige echte wereld
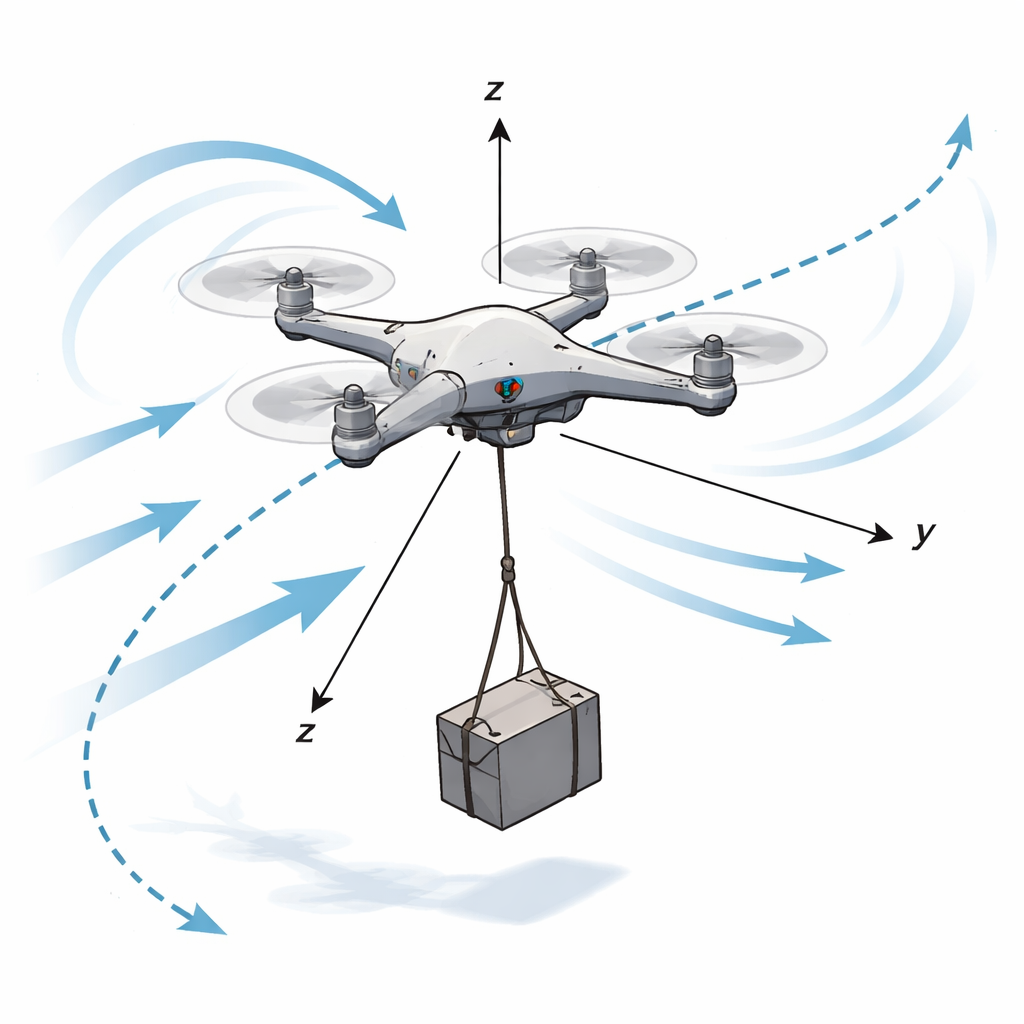
Kleine vierrotor-drones worden steeds vaker ingezet voor taken zoals het inspecteren van bruggen, het monitoren van gewassen of het vervoeren van kleine pakketten. Maar in de echte wereld krijgen deze vliegende robots te maken met zijdelingse windstoten en zwaaiende lasten die onder hen hangen, en beide kunnen hen gemakkelijk van koers brengen. Dit artikel presenteert een nieuwe methode om zulke drones vloeiend langs hun geplande trajecten te laten vliegen, zelfs wanneer de lucht ruw is en een zwiepende lading aan hen trekt.
Waarom wind en hangende lasten zo lastig zijn
Een quadrotor-drone is van nature moeilijk te besturen. Hij is licht, reageert snel op kleine motorveranderingen en zijn bewegingen in verschillende richtingen zijn sterk gekoppeld. Wanneer sterke of snel wisselende winden de drone raken, duwen die hem onvoorspelbaar. Het toevoegen van een kabel-opgehangen lading, zoals een camerarigger of een fles vloeistof, maakt het nog erger: de lading kan als een slinger zwiepen en extra krachten terugvoeren naar de drone. Traditionele regelaars, zoals de veelgebruikte PID-aanpak of geavanceerdere sliding-mode- en backstepping-schema’s, werken goed alleen wanneer ingenieurs de fysica van de drone zeer nauwkeurig kennen en de storingen bescheiden zijn. Als het wiskundige model afwijkt, of als wind- en ladingkrachten op complexe manieren veranderen, kunnen deze methoden trage reacties, overshoot of zichtbaar gewankel tijdens de vlucht veroorzaken.
Een slimme waakhond voor verborgen storingen
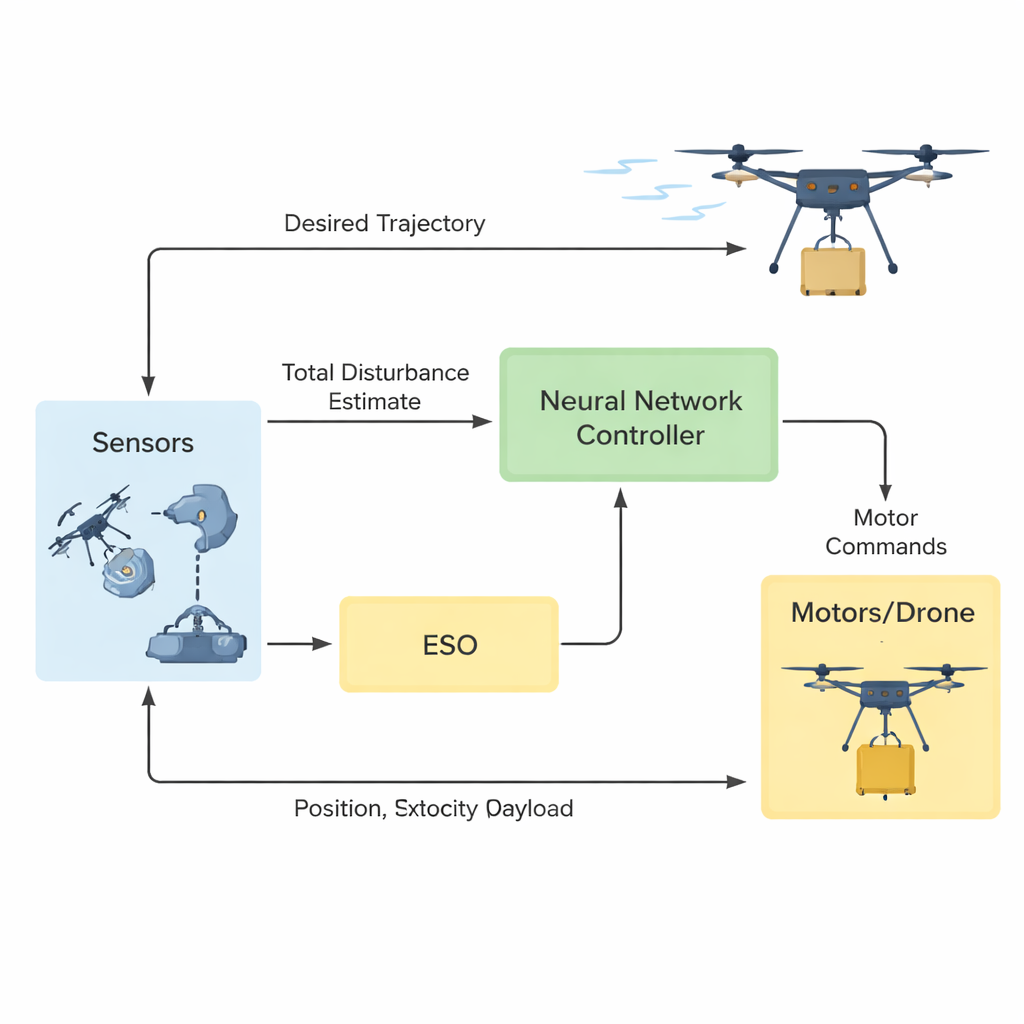
Om dit aan te pakken bouwen de auteurs voort op een concept dat actieve stoornisonderdrukking heet. In plaats van te proberen elk detail van de wind en de zwiepende lading te modelleren, behandelen ze alle onbekende invloeden samen als één enkele “geaggregeerde” stoornis. Een speciaal ontworpen uitgebreid toestandsobservator fungeert als een wiskundige waakhond die constant deze totale stoornis afleidt uit de beweging van de drone. Opvallend is dat hun observator met slechts één hoofdparameter wordt afgestemd, wat de instelling sterk vereenvoudigt vergeleken met veel bestaande ontwerpen. De theorie toont aan dat, bij juiste afstemming, de schatting van de observator snel convergeert en strak begrensd blijft, wat betekent dat deze kan worden vertrouwd als een realtime feedforward-correctie in plaats van slechts een grove schatting.
De moeilijke delen laten leren door een neuraal netwerk
Zelfs met goede stoornisinschattingen moet de regelaar nog weten hoe de motoren van de drone commando’s omzetten in daadwerkelijke beweging — een relatie die afhangt van massa, geometrie en andere fysische details die in de loop van de tijd kunnen veranderen. In plaats van te vertrouwen op een moeizaam geïdentificeerd model, introduceren de auteurs een radiale-basisfunctie-neuraal netwerk dat deze relatie direct leert van vluchtsignalen. De regelaar hoeft alleen te weten waar de drone is, waar hij naartoe moet en de tweede afgeleide van het gewenste pad (hoe snel het doelpunt accelereert). Een adaptieve wet werkt continu de interne gewichten van het neurale netwerk bij om volgfouten te verminderen. Met Lyapunov-gebaseerde analyse bewijzen de auteurs dat onder dit adaptieve schema de volgfouten uniform begrensd blijven en tot willekeurig kleine waarden kunnen worden teruggebracht, terwijl de gewichtsaanpassingen stabiel blijven.
De methode op de proef stellen
Het team valideert hun benadering zowel via computersimulaties als via experimenten in de echte wereld. In simulaties wordt de drone uitgedaagd om complexe driedimensionale spiraaltrajecten te volgen terwijl hij wordt getroffen door willekeurige windstoten en ladingkrachten die in de tijd veranderen. De nieuwe regelaar wordt vergeleken met drie andere geavanceerde methoden: lineaire actieve stoornisonderdrukking, sliding-mode-regeling, modelvrije terminal sliding-mode-regeling, en in een zwaardere test adaptieve fractie-orde regeling. In meerdere scenario’s bereikt de voorgestelde methode vloeiendere trajecten en kleinere wortel-kwadraat-gemiddeldepositie-fouten, vooral nadat storingen worden geïntroduceerd. In fysieke tests vliegen de onderzoekers een quadrotor binnenshuis terwijl twee industriële ventilatoren lucht naar hem blazen en een fles van 200 gram water eronder hangt. Motion-capture-camera’s registreren de positie van de drone. Zelfs onder continue wind en handmatige rukken aan de lading houdt de drone zijn doelpunt binnen enkele centimeters en blijven de motorcommando’s goed gedoseerd, wat suggereert dat de methode praktisch is voor echte hardware.
Wat dit betekent voor alledaags dronengebruik
Voor niet-specialisten is de belangrijkste conclusie dat dit werk een manier biedt om drones betrouwbaarder te maken in ruwe omstandigheden zonder perfecte kennis van hun interne fysica te vereisen. Door een eenvoudige maar krachtige stoornisobservator te combineren met een leer-gebaseerde regelaar kan het systeem zich tijdens de vlucht aanpassen aan windstoten en zwiepende lasten, en de drone op koers houden met minimale afstelinspanning. Dit soort robuuste, model-arme besturing kan het eenvoudiger maken om drones in te zetten voor routinetaken in steden, op boerderijen en in fabrieken, en dezelfde ideeën kunnen uiteindelijk uitbreiden naar teams van drones en fouttolerante ontwerpen die veilig blijven vliegen zelfs wanneer sommige componenten uitvallen.
Bronvermelding: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Trefwoorden: quadrotorbesturing, drone-stabiliteit, windstoringen, neurale netwerkregelaar, ladingvolging