Clear Sky Science · nl
PCA-whitening verbetert de lichttolerantie voor visuele plaatsherkenning met Fouriersignaturen
Robots die hun weg binnenshuis vinden
Stel je een robot voor die door een huis of kantoor rijdt waar de ene dag fel zonlicht is en de volgende dag gedimde lampen. Om te weten waar hij is, vergelijkt de robot wat zijn camera nu ziet met eerder opgeslagen beelden. Maar wanneer de verlichting sterk verandert, kunnen plaatsen bijna onherkenbaar lijken. Dit artikel onderzoekt een zuinige, wiskundige aanpak waarmee robots plaatsen herkennen aan de hand van panoramische beelden, en laat zien hoe een statistische truc, PCA-whitening, deze methode veel toleranter maakt voor veranderende verlichting.
De wereld zien als golven, niet als pixels
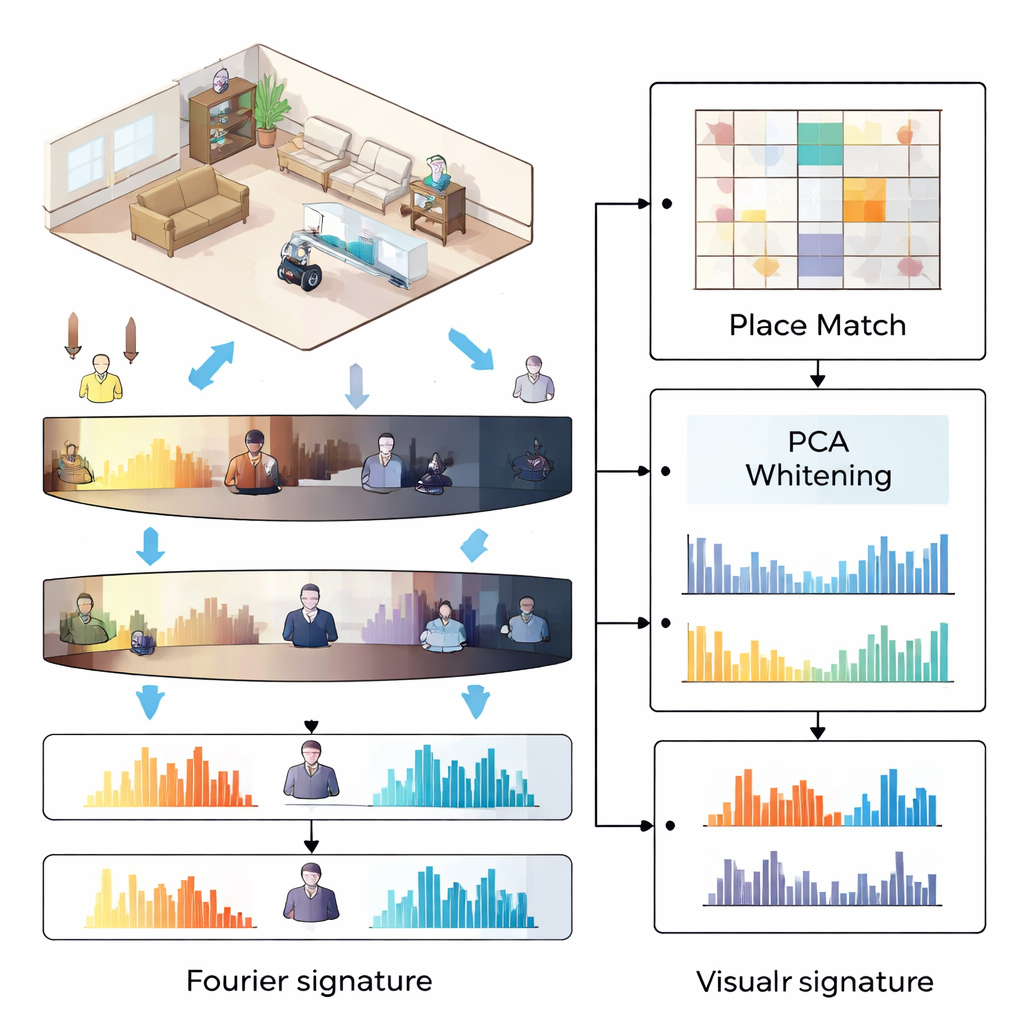
De meeste moderne systemen voor visuele plaatsherkenning gebruiken veel kleine details in een beeld—randen, hoeken en texturen—en combineren die tot een compact “vingerafdruk”. In tegenstelling daarmee bouwt dit werk voort op Fouriersignaturen, die een panoramisch beeld niet als een raster van pixels zien maar als een mengsel van golven met verschillende frequenties. De camera legt een 360-graden uitzicht vast; dit panorama wordt in horizontale banden gesplitst en elke band wordt omgezet in een eendimensionaal frequentiespectrum. Alleen de sterktes (amplitudes) van de laagste frequenties worden bewaard en gestapeld tot een descriptor. Omdat de methode informatie over de plaats van kenmerken langs de cirkel weglaat, verandert de descriptor nauwelijks wanneer de robot zich gewoon omdraait, wat hem van nature robuust maakt tegen rotatie.
Waarom verlichting eenvoudige signaturen breekt
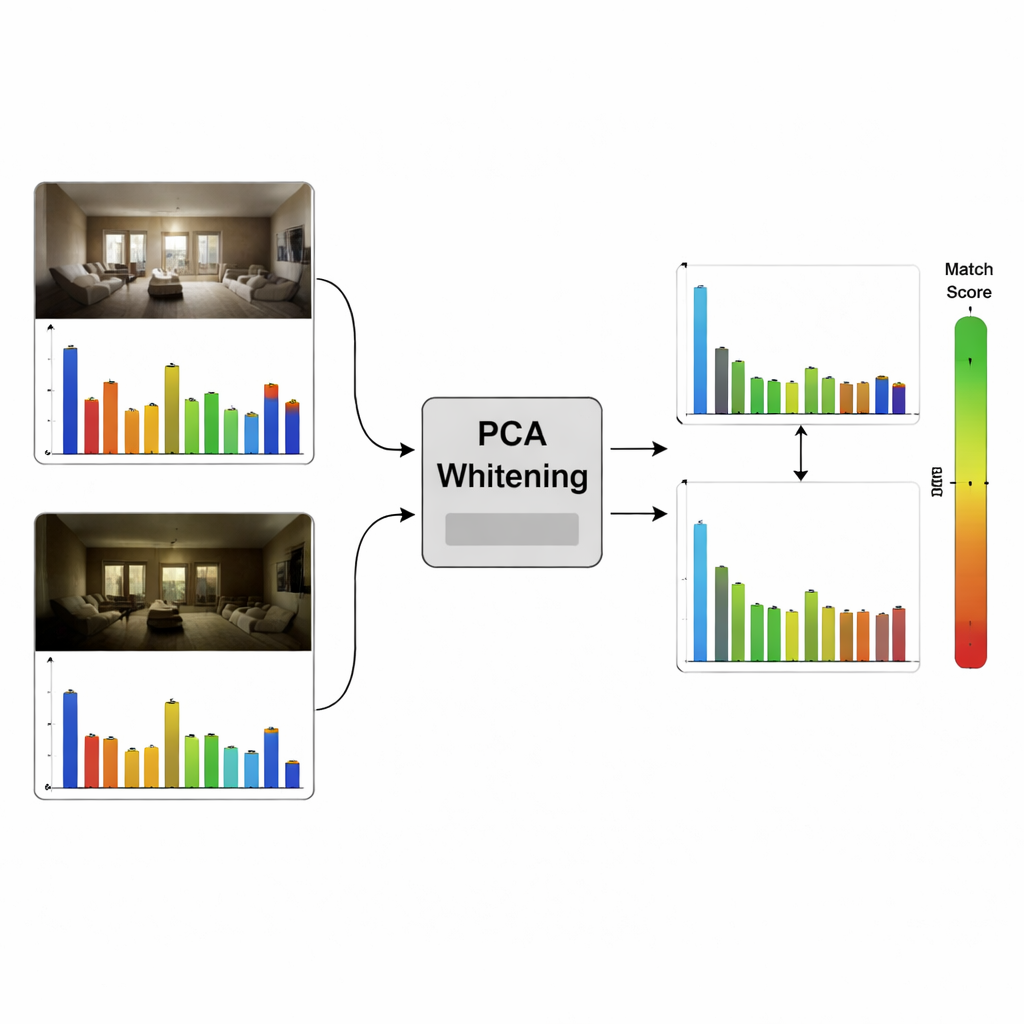
Hoewel Fouriersignaturen compact en snel te berekenen zijn, hebben ze nog steeds moeite wanneer de verlichting sterk verschilt tussen opnames van dezelfde plek. Natuurlijke beelden bevatten meestal veel meer energie in lage frequenties dan in hoge, en deze scheefheid wordt door verlichting beïnvloed. Daardoor domineren sommige delen van de descriptor de gelijkenismaat, en veel waarden zijn sterk gecorreleerd omdat aangrenzende rijen in het panorama op elkaar lijken. Zonder correctie wordt de beslissing van het systeem of twee beelden dezelfde plek tonen gedreven door een kleine, redundante subset van waarden, waardoor het kwetsbaar wordt bij verschillende lichtomstandigheden.
Het signaal opschonen met PCA-whitening
De auteur stelt voor PCA-whitening toe te voegen als nabehandelingsstap voor de Fourierdescriptors. Met een verzameling trainingspanorama’s uit zeven binnenomgevingen leert het systeem hoe descriptorwaarden doorgaans variëren en correleren. PCA-whitening centreert vervolgens de descriptor opnieuw, roteert hem naar richtingen van onafhankelijke variatie en herschaalt elke richting zodat ze allemaal gelijke invloed hebben. Dit verwijdert redundante correlaties en balanceert de bijdrage van verschillende frequenties. Omdat de getransformeerde waarden op belangrijkheid worden gesorteerd, kan de descriptor ook veilig worden ingekort door simpelweg de staart af te knippen. Experimenten in drie niet eerder geziene omgevingen met meerdere lichtvarianten tonen dat whitening consequent de kans vergroot dat de juiste plek voorkomt in de bovenste opgehaalde kandidaten, vooral in de praktisch belangrijke situatie waarin slechts een korte lijst van waarschijnlijke overeenkomsten wordt teruggegeven.
Lichtgewicht maar concurrerend met deep learning
Om te beoordelen hoe deze gestroomlijnde aanpak zich verhoudt tot huidige trends, vergelijkt het artikel deze met AnyLoc, een recente methode voor visuele plaatsherkenning die is gebaseerd op een zeer groot vision-transformer-netwerk. AnyLoc gebruikt ook PCA-gebaseerde compressie, maar begint bij hoog-dimensionale features die door deep learning worden geproduceerd. Op de panoramische binnenshuis-dataset evenaren of overtreffen gewharte Fouriersignaturen AnyLoc wanneer het systeem tot ongeveer tien kandidaatbeelden mag voorstellen, wat een realistisch werkpunt is voor veel robots. Cruciaal is dat de Fourier-gebaseerde methode veel goedkoper is om uit te voeren: ze vertrouwt op snelle Fouriertransformaties en eenvoudige matrixoperaties op de CPU, terwijl AnyLoc een krachtige GPU en veel meer tijd per beeld nodig heeft.
Wat dit betekent voor alledaagse robots
Voor een niet-specialistische lezer is de kernboodschap dat het slimme gebruik van klassieke wiskunde het nog steeds kan opnemen tegen zware kunstmatige intelligentie in bepaalde taken. Door panoramische beelden te transformeren naar gebalanceerde, gedecorreleerde descriptors maakt PCA-whitening een eenvoudige frequentie-gebaseerde plaatsherkenningsmethode veel robuuster tegen veranderingen in verlichting. Robots die deze aanpak gebruiken, kunnen zichzelf betrouwbaar lokaliseren in huizen en kantoren onder uiteenlopende lichtomstandigheden, terwijl ze bescheiden rekenmiddelen gebruiken. Dit maakt robuuste visuele navigatie toegankelijker voor kleinere, goedkopere robots die mogelijk op een dag onze alledaagse ruimtes delen.
Bronvermelding: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Trefwoorden: visuele plaatsherkenning, mobiele robots, panoramische beeldvorming, Fouriersignaturen, PCA-whitening