Clear Sky Science · nl
Verbeterde pure pursuit met dynamische stuurregeling voor autonome mobiele robots en toepassing op veilige navigatie in chemische fabrieken
Robots die op koers blijven
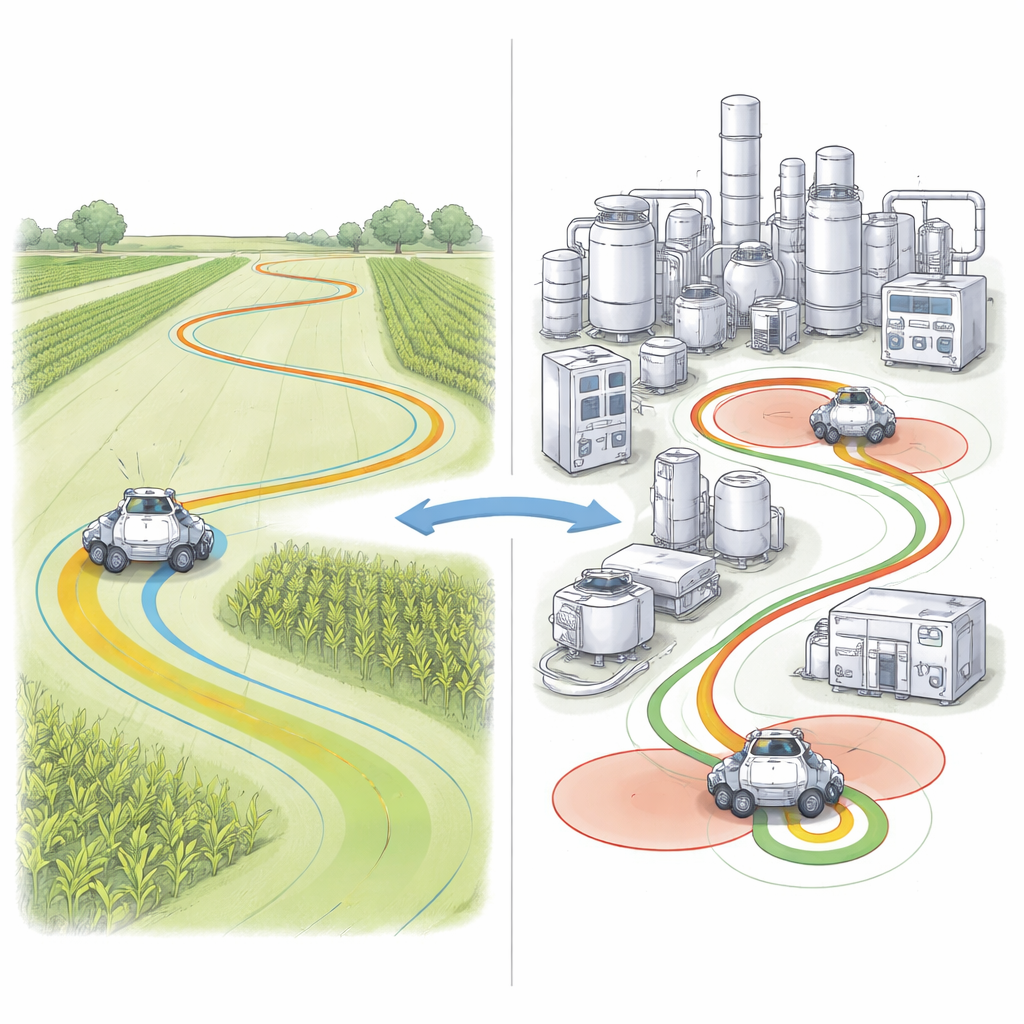
Nu robots buiten schone fabriekshallen werken en de velden en chemische installaties betreden, moeten ze smalle trajecten met grote precisie volgen. Een kleine wiebeling kan gewassen verpletteren, tegen leidingen stoten of een gebied binnenrollen waar brandbare gassen aanwezig zijn. Dit artikel beschrijft een nieuwe manier voor rijdende robots om te sturen en hun snelheid te regelen, zodat ze dicht bij een gepland traject blijven, zowel in open terrein als in krappe industriële omgevingen.
Waarom het lastig is een robot te begeleiden
Veel autonome mobiele robots gebruiken vandaag de dag een eenvoudige regel genaamd “pure pursuit” om een pad te volgen. De robot kijkt een korte afstand vooruit langs de route, richt zich op dat punt en herhaalt dit proces snel. In de praktijk moeten ingenieurs bepalen hoe ver vooruit de robot “kijkt” en hoe snel hij beweegt. Is de vooruitkijkafstand te kort, dan reageert de robot zenuwachtig en kan hij van links naar rechts slingeren. Is die afstand te lang, dan reageert hij te traag en snijdt hij bochten af, vooral bij krappe bochten of hogere snelheden. Buiten komt daar nog een complicatie bij: de positie van de robot wordt geschat door satellietsignalen, bewegingssensoren en wielrotatiegegevens te combineren, die elk hun eigen fouten en vertragingen hebben.
Een slimere manier van sturen en snelheidsinstelling
De auteurs stellen een verbeterde methode voor genaamd Pure Pursuit met Dynamische Stuurregeling (PP-DSC). In plaats van de vooruitkijkafstand en snelheid vast te houden, past de robot beide in real time aan op basis van hoe scherp hij stuurt. Wanneer de stuurhoek klein is en het pad vrijwel recht, gebruikt de robot een langere vooruitkijkafstand en hogere snelheid voor een vloeiende, efficiënte rit. Naarmate de stuurhoek bij bochten toeneemt, verkleint de vooruitkijkafstand en daalt de snelheid automatisch, waardoor de robot meer tijd krijgt om te reageren en zijwaartse uitwijking wordt verminderd. Dit gedrag is geïmplementeerd op een vierwielige, autogelijkende robot die een modern robotica-softwareframework gebruikt, samen met hoogprecieze satellietpositionering, een traagheidssensor en wielencoders om zijn beweging te schatten.

Testen in velden en virtuele chemische fabrieken
Om te beoordelen hoe goed PP-DSC werkt, voerde het team buitenexperimenten uit op drie basistracés: een rechte lijn, een lus en een achtvorm, bij snelheden van 1 tot 5 meter per seconde. Ze vergeleken de nieuwe methode met de standaard pure pursuit-aanpak. De verbeterde regelaar hield de robot in elk geval veel dichter bij het beoogde traject. Op rechte lijnen daalde de gemiddelde zijwaartse fout tot ongeveer vijf centimeter, en op gebogen trajecten bleef de fout onder de acht centimeter. Ter vergelijking: de traditionele methode kon enkele tientallen centimeters afwijken en vertoonde grotere pieken bij het ingaan of verlaten van bochten, vooral bij hogere snelheden.
Veiligheid toevoegen in gevaarzones
De onderzoekers onderzochten ook hoe een dergelijke robot zich binnen een chemische fabriek zou gedragen, waar hij taken kan krijgen zoals het inspecteren van hete reactoren of het vervoeren van monsters. In plaats van een volledig industrieel testplatform te bouwen, gebruikten ze een gedetailleerd computermodel van een biodieselinstallatie met daarin de posities van apparatuur en zones met verhoogd brand- en explosierisico. Ze breidden hun regelaar uit met een veiligheidsfactor die de robot automatisch vertraagt wanneer hij deze gevaarzones binnenrijdt, gebaseerd op een standaard brand- en explosie-index die in de procesveiligheid wordt gebruikt. Simulaties toonden aan dat deze veiligheidsgestuurde versie van PP-DSC de volgfout slechts licht verhoogde—gemiddeld minder dan één procent—terwijl de robot verzekerd was van lagere snelheden rond gevaarlijke apparatuur.
Het juiste gereedschap kiezen voor elke taak
Een interessante uitkomst is dat geen enkele stuurstrategie overal het beste was. In open velden met milde bochten presteerde de dynamische methode duidelijk beter dan de traditionele aanpak, waarbij het traject van de robot strak en soepel bleef, zelfs bij hogere snelheden. In de krappe geometrie van een chemische fabriek deed eenvoudige pure pursuit met een vaste vooruitkijkafstand het echter soms beter, vooral op krappe lussen en zelfkruisende “acht”-routes waarbij de dynamische vooruitkijkafstand de robot per ongeluk naar de verkeerde tak van het pad kon leiden. De auteurs concluderen dat robots tussen strategieën moeten kunnen schakelen afhankelijk van de vorm van het pad: de verbeterde, veiligheidgeïntegreerde regelaar gebruiken voor matige bochten en risicobewuste trajecten, en terugvallen op een vaste-vooruitkijkregeling voor zeer krappe of lussende trajecten. Voor niet-experts is de kernboodschap dat veilige, betrouwbare robotnavigatie in echte fabrieken en velden niet alleen gaat over goede kaarten en sensoren—hoe de robot kiest waar hij kijkt en hoe snel hij gaat, is net zo belangrijk.
Bronvermelding: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Trefwoorden: autonome mobiele robots, padvolging, stuurregeling, GNSS-RTK-navigatie, veiligheid in chemische fabrieken