Clear Sky Science · nl
Lichtgewicht doelherkenning en meerdere-doelvolging voor UAV-inspectie in dagbouwmijnen
Slimmere ogen in de lucht
Dagbouwmijnen zijn uitgestrekte, ruige omgevingen waar zware vrachtwagens, graafmachines en mensen constant in beweging zijn. Alles veilig en soepel laten verlopen vereist doorgaans veel personeel op de grond en dure positioneringsapparatuur, en toch kunnen kleine storingen en indringers onopgemerkt blijven. Dit artikel onderzoekt hoe lichtgewicht, intelligente drones deze mijnen van bovenaf kunnen patrouilleren en in realtime automatisch apparatuur, personen en problemen kunnen detecteren, terwijl ze binnen de strakke rekengrenzen van aan boord aanwezige elektronica blijven werken.
Waarom mijnen betere bewaking nodig hebben
Moderne mijnen vertrouwen al op instrumenten zoals satellietpositionering en speciale radiobakens om vrachtwagens en machines te volgen. Maar deze “actieve” systemen hebben blinde vlekken: signalen kunnen worden geblokkeerd door steile wanden, stof of storing, en ze werken alleen voor voertuigen en personen die de juiste apparatuur bij zich hebben. Ze kunnen ook niet laten zien hoe een storing er precies uitziet. Drones kunnen daarentegen over moeilijk terrein vliegen, rijke beelden en video vastleggen en niet-coöperatieve doelwitten zoals onbevoegde voertuigen volgen. De uitdaging is dat krachtige vision-algoritmen normaal gesproken zware computers vereisen, terwijl drones beperkt zijn in gewicht, energie en rekenkracht. De auteurs zetten zich in om een detectie- en volgsysteem te ontwerpen dat zowel nauwkeurig als licht genoeg is om direct op een drone te draaien.
Drones leren kleine en verborgen doelen te zien
De kern van het werk is een verbeterde versie van een populair visiemodel genaamd YOLO, specifiek afgestemd op dagbouwmijnen. De onderzoekers herschikken de “backbone” van het model zodat het onregelmatige silhouetten van vrachtwagens, graafmachines en hopen steen kan volgen, in plaats van te vertrouwen op starre, rasterachtige filters. Ze herontwerpen ook het deel van het netwerk dat informatie van grove en fijne beeldelementen samenvoegt, zodat kleine, verre machines en grotere nabijgelegen exemplaren samen worden vastgelegd zonder verwarring. Bovendien richt een nieuwe, lichtgewicht beslissingsmodule de aandacht op de meest informatieve details in de scène, waardoor het systeem kleine faalpunten en deels verborgen machines kan onderscheiden van de rommelige achtergrond.
Krachtige modellen passend maken voor een drone
Zelfs met deze verbeteringen kan een visiemodel gemakkelijk te groot worden voor drone-hardware. Om dit op te lossen past het team een zorgvuldige pruningstrategie toe die analyseert welke interne verbindingen het meest bijdragen aan de prestatie en vervolgens de rest wegsnoeit. Dit proces verkleint het aantal parameters en de hoeveelheid rekenwerk, terwijl de sterkste paden in het netwerk behouden blijven. Bij een optimaal niveau van pruning behoudt het systeem hoge detectienauwkeurigheid maar reduceert het modelgrootte, berekeningen en responstijd voldoende om op een compact embedded processor te draaien, met minder stroomverbruik en langere vliegtijd tot gevolg. Tests op een aangepaste mijn-dataset en op een openbare drone-benchmark tonen dat het geprunde model meerdere bekende alternatieven overtreft, vooral voor kleine en deels verborgen doelen.
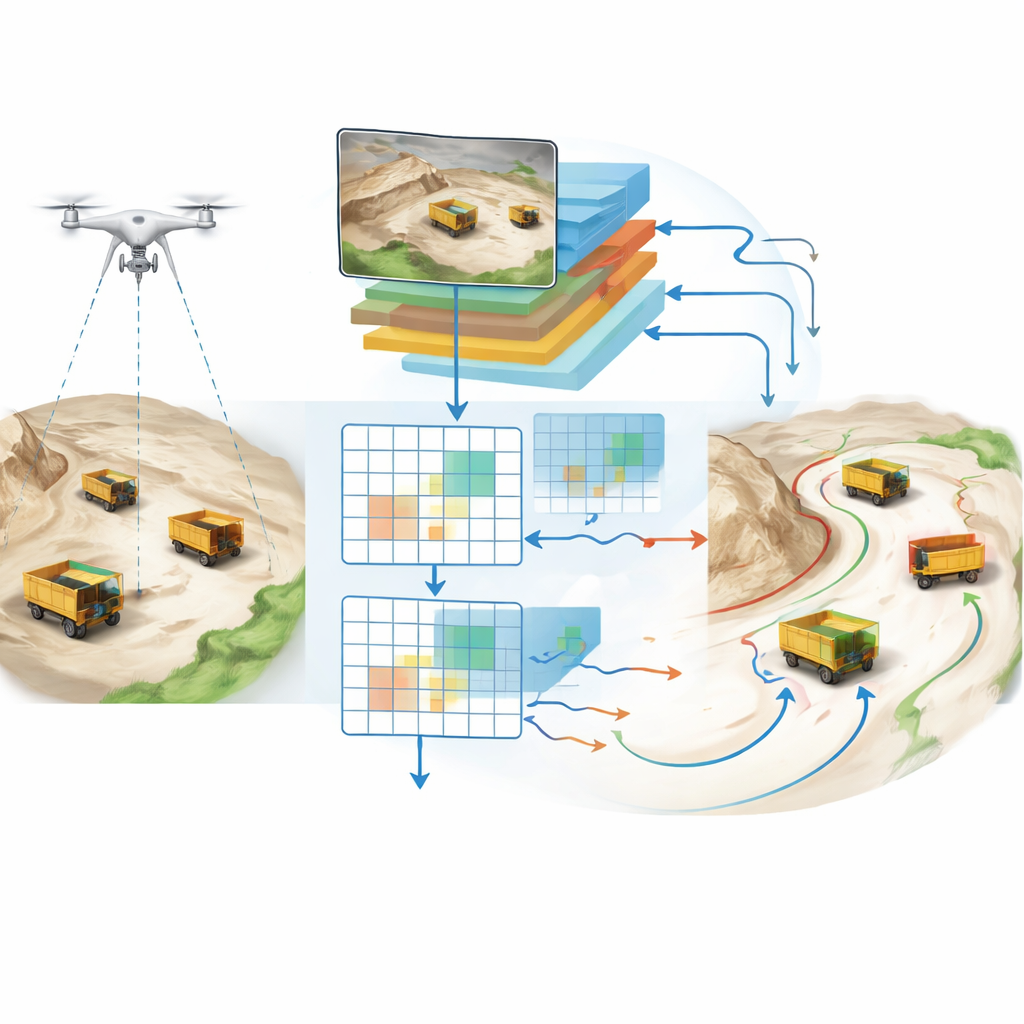
Van snapshots naar vloeiende trajecten
Objecten in één beeld detecteren is slechts de helft van het verhaal; mijnen moeten ook weten hoe elke vrachtwagen of persoon zich in de tijd verplaatst. Hiervoor verbeteren de auteurs een bestaande multi-object tracking-aanpak zodat die beter omgaat met drukke scènes, op elkaar lijkende voertuigen en plotselinge bewegingen. Ze creëren een gecombineerde gelijkenismeting die rekening houdt met waar een doel zich bevindt, hoe het eruitziet en zelfs of het geladen of leeg lijkt te zijn. Ze corrigeren ook de bewegingsvoorspellingen om verandering in versnelling te compenseren, bijvoorbeeld wanneer een vrachtwagen afslaat of een helling oprijdt. Samen verminderen deze stappen identiteitsverwisselingen—waarbij het ene voertuig voor het andere wordt aangezien—en houden ze de volglijnen vloeiend en betrouwbaar, terwijl ze snel genoeg blijven voor realtime gebruik op drone-grade hardware.
Op weg naar onbeheerde, continu opererende mijnpatrouilles
Tot slot plaatsen de auteurs hun visie- en volgsystemen binnen een meerlaagse inspectie-opzet die meerdere drones kan coördineren, data kan streamen over 5G en ad-hoc verbindingen, en resultaten naar de grondcontrole kan sturen. In experimenten boven echte mijnen verbetert deze opstelling de nauwkeurigheid en stabiliteit van apparaatsbewaking sterk vergeleken met traditionele methoden. Voor niet-specialisten is de belangrijkste conclusie dat de studie een praktische weg toont naar kleine, efficiënte vliegende robots die continu enorme industriële terreinen kunnen bewaken, kleine defecten, niet-geregistreerde bezoekers en risicovolle situaties kunnen opsporen voordat ze escaleren—zonder zware computers of dichte netwerken van bakens op elk voertuig nodig te hebben.
Bronvermelding: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Trefwoorden: drone-inspectie, dagbouw, objectdetectie, multi-object tracking, lichtgewicht AI-modellen