Clear Sky Science · nl
Een intracorticale brain–machine interface gebaseerd op ventrale premotorische activiteit bij makaken
De hersenen leren een cursor te bewegen
Stel je voor dat je een computercursor of een robotarm alleen met je gedachten bestuurt, ook als je spieren niet meer functioneren. Brain–machine interfaces (BMI’s) willen dat mogelijk maken door hersenactiviteit om te zetten in commando’s voor externe apparaten. De meeste systemen tot nu toe halen signalen uit één hoofdgebied voor beweging, maar wat als dat gebied beschadigd is, zoals bij een beroerte of ALS? Deze studie onderzoekt of een nabijgelegen gebied, dat doorgaans gekoppeld is aan het plannen van handbewegingen en het observeren van andermans acties, ook betrouwbaar een BMI kan aansturen.
Een nieuw hersengebied doet mee
Classieke BMI’s lezen voornamelijk signalen af uit de primaire motorische cortex, de hersenstrook die vrijwillige bewegingen direct aanstuurt, en uit een aangrenzend planningsgebied dat dorsale premotorische cortex heet. De onderzoekers richtten hun aandacht op een andere buur: de ventrale premotorische cortex, specifiek een zone die F5c wordt genoemd. Bij apen bevat F5c veel cellen die vuren wanneer het dier reikt en grijpt, en zelfs wanneer het eenvoudigweg acties op een scherm bekijkt. Die mix van bewegings- en observatie-responsen suggereerde dat F5c goed geschikt zou kunnen zijn om een cursor of een robotachtige “avatar” te besturen zonder dat het lichaam hoeft te bewegen.
Apen, micro-elektroden en bewegende doelen
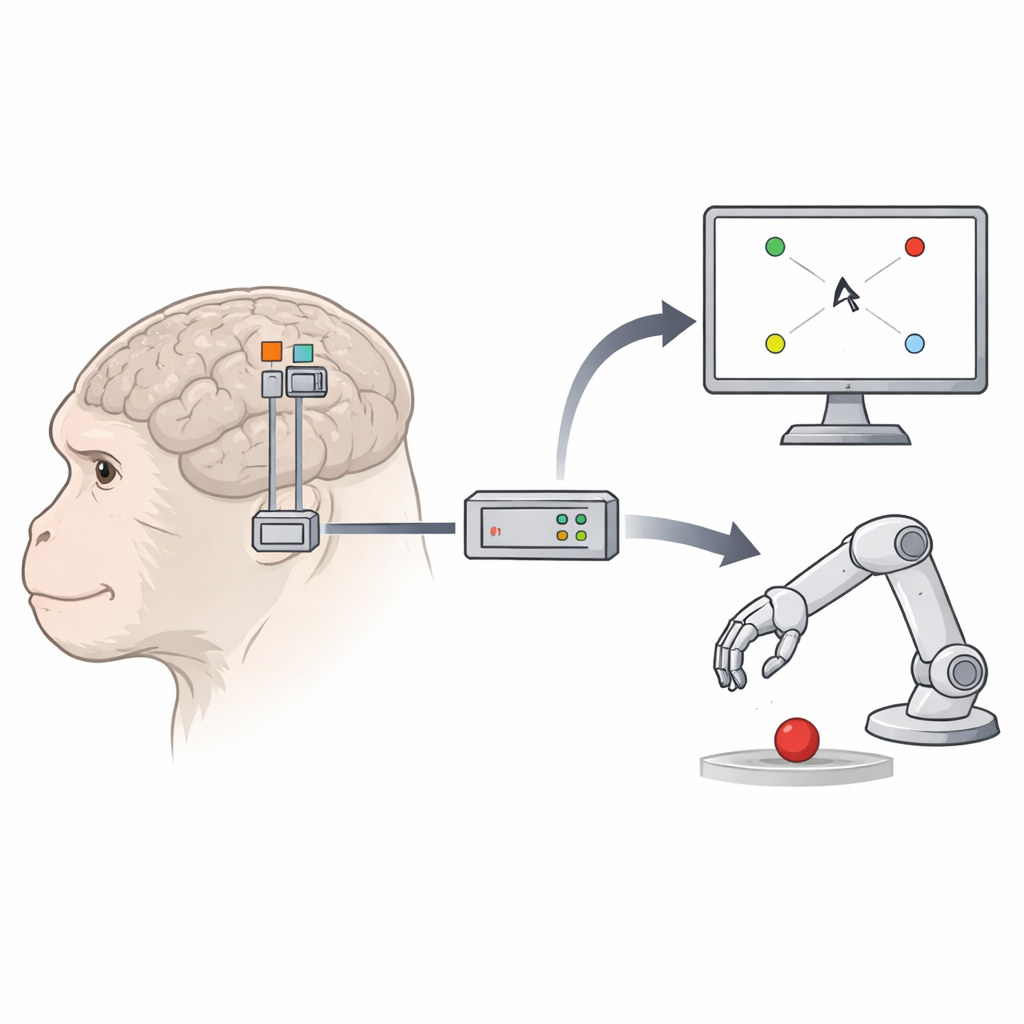
Twee makaakapen kregen kleine 96-elektrode roosters geïmplanteerd op drie locaties: primaire motorische cortex, dorsale premotorische cortex en F5c. In dagelijkse sessies voerden de dieren meerdere visueel eenvoudige maar gedragsmatig veeleisende taken uit. In één taak raakten ze het midden van een scherm aan en reikten vervolgens naar een van acht buitenste doelen, terwijl een klein blokje op het scherm van het midden naar hetzelfde doel bewoog. In een tweede taak hielden ze hun hand stil en bekeken simpelweg de cursor die naar de doelen bewoog. In een derde, levensechtere opstelling werd de cursor vervangen door een 3D-robotarm-avatar die naar doelen in een virtuele scène reikte. Over deze taken kon het team vergelijken hoe goed elk hersengebied cursor- of avatarbewegingen aanstuurde.
Hoe hersensignalen soepele beweging werden
Tijdens een trainingsfase volgde de cursor of avatar computergestuurde, zacht gebogen paden terwijl de apen ofwel bewogen ofwel keken. Tegelijkertijd registreerden de elektroden snelle bursts van hersenactiviteit. De onderzoekers trainden vervolgens een decoder — een wiskundig hulpmiddel dat leert patronen van hersenvuren te koppelen aan snelheden van de cursor of avatar op het scherm. Om alleen de meest informatieve kanalen te gebruiken, selecteerden ze elektroden waarvan de activiteit richting en snelheid van beweging volgde. Ze gebruikten een methode die hersenpatronen isoleert die het nauwst aan gedrag gerelateerd zijn en versterkten die met een niet-lineaire stap, zodat het systeem complexere relaties tussen neurale activiteit en beweging kon vastleggen. In de decodeerfase stopte de computer met het aansturen van de cursor of avatar; in plaats daarvan gebruikte de decoder live hersensignalen, bijgewerkt elke 50 milliseconden, om de weergave te sturen. De decoder werd periodiek op de achtergrond hertraind zodat hij zich kon aanpassen naarmate neurale responsen in de loop van de tijd verschilden.

Hoe goed presteerde het “nieuwe” gebied?
De kernvraag was of F5c de prestaties van de traditionele controlegebieden kon evenaren of benaderen. Bij beide apen bleef decodering op basis van F5c aanvankelijk achter bij het bewegen van de cursor, vooral wanneer de dieren alleen keken en hun eigen hand niet bewogen. Maar naarmate sessies vorderden — en naarmate meer elektroden betrouwbare bewegingsgerelateerde signalen leverden — kwam F5c bij. In meerdere condities was de prestatie gelijk aan die van de primaire motorische cortex en zelfs beter in latere sessies bij passieve cursorbesturing. Bij de aansturing van de robotavatar was het algemene succes lager in alle gebieden, maar F5c ondersteunde nog steeds betekenisvolle controle, vooral in combinatie met een lichte assistieve algoritme dat de avatar subtiel naar het doel begeleidde. Belangrijk is dat neuronen in alle drie regio’s vergelijkbare patronen van directionele tuning en populatie-activiteit toonden tijdens de computergestuurde trainingsfase en de actieve controlefase, waarbij slechts een subset hun voorkeurrichting veranderde terwijl de apen leerden de BMI te besturen.
Wat dit betekent voor toekomstige neurotechnologie
Voor niet-specialisten is de belangrijkste conclusie dat de ventrale premotorische zone F5c — ooit vooral gezien als planner en waarnemer van acties — ook kan dienen als praktisch controlecentrum voor brain–machine interfaces. Wanneer voldoende bewegingsgerelateerde signalen beschikbaar zijn, kunnen decoders getraind op F5c-activiteit een schermcursor of een assistieve robot bijna even goed sturen als decoders gebaseerd op het klassieke bewegingsgebied. Dit suggereert dat toekomstige klinische BMI’s niet per se op één corticaal gebied hoeven te leunen. Voor mensen wier primaire motorische cortex beschadigd is, zouden naburige planningsregio’s zoals de ventrale premotorische cortex een alternatieve route kunnen bieden om weer controle te krijgen over digitale hulpmiddelen, prothetische apparaten of mobiliteitshulpmiddelen.
Bronvermelding: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Trefwoorden: brain–machine interface, motorische cortex, premotorische cortex, neurale decodering, prothetische besturing