Clear Sky Science · nl
Een virtueel-structuur-gebaseerd type-3 fuzzy-systeem voor voorspellende detectie van sensor- en actuatorstoringen, compensatie en regeling in niet-lineaire systemen
Machines op koers houden wanneer onderdelen falen
Moderne technologieën — van robotarmen op fabriekvloeren tot chemische installaties die de zuurgraad regelen — zijn afhankelijk van sensoren en actuatoren die stilletjes alles draaiende houden. Maar wanneer deze onderdelen gaan driften, vastlopen of uitvallen, kan een systeem onveilig worden nog voordat iemand het opmerkt. Dit artikel introduceert een nieuwe manier waarop machines dergelijke problemen zelf kunnen waarnemen en corrigeren, zelfs wanneer ingenieurs geen precies wiskundig model hebben van het interne gedrag van het systeem.
Waarom verborgen problemen zo moeilijk te ontdekken zijn
In veel praktische situaties is het gedrag van een systeem sterk niet-lineair: kleine veranderingen in de invoer kunnen grote, onverwachte schommelingen in de uitvoer veroorzaken. Traditionele regelmethoden nemen aan dat ontwerpers de vergelijkingen kennen die dit gedrag bepalen en dat sensoren en actuatoren grotendeels naar verwachting werken. In de praktijk verouderen componenten, worden ze lawaaierig of worden ze vervangen door licht afwijkende hardware. Conventionele fouttolerante regelaars bouwen óf vaste veiligheidsmarges in (passieve methoden), óf vertrouwen op nauwkeurige modellen om storingen te detecteren en te accommoderen (actieve methoden). Beide benaderingen hebben moeite wanneer het systeem in de loop van de tijd verandert of wanneer de interne werking niet volledig bekend is. De auteurs betogen dat de industrie regelaars nodig heeft die leren van live data, herkennen wanneer sensoren of actuatoren zich misdragen, en die deze storingen in realtime corrigeren zonder een gedetailleerde blauwdruk van het systeem.
Een lerende regelaar die het systeem als een black box behandelt
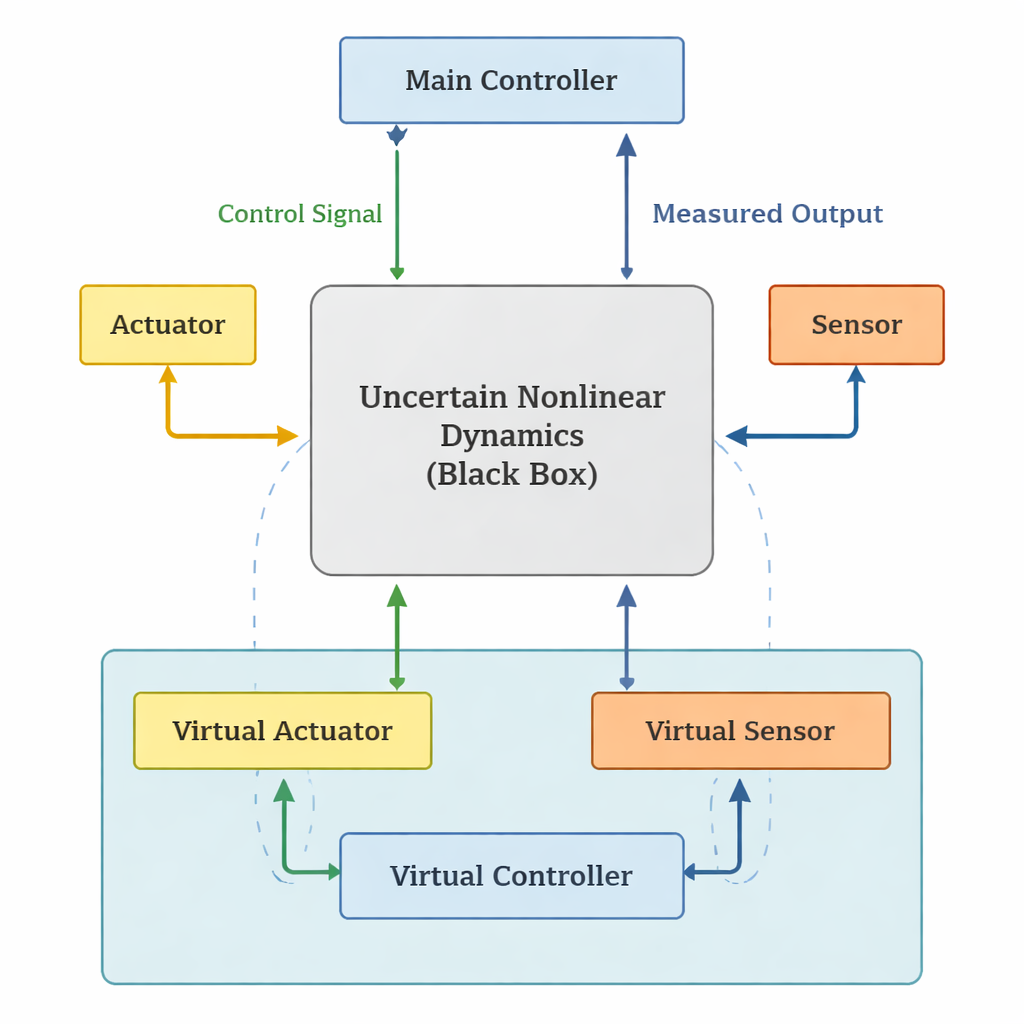
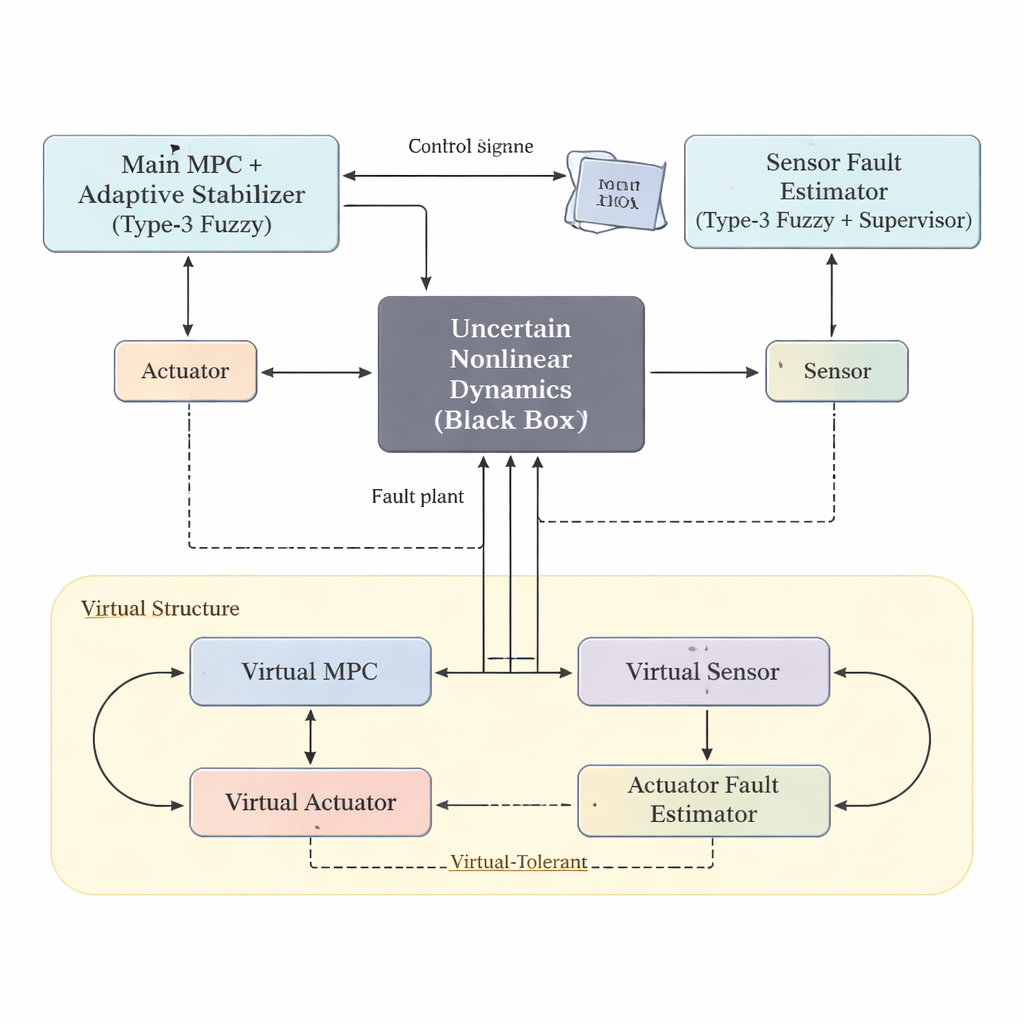
Het voorgestelde kader behandelt de installatie volledig als een black box: het ziet alleen de aangestuurde signaalen en de door sensoren gemeten outputs. De kern is een type-3 fuzzy-logicasysteem, een geavanceerde vorm van fuzzy-modellering ontworpen om sterke onzekerheid en meetruis aan te kunnen. Dit fuzzy-systeem leert online een compacte input–output-beschrijving van de onbekende dynamiek, terwijl een modelvoorspellende regelaar (MPC) dat geleerde model gebruikt om toekomstige stuuracties over een korte horizon te plannen. Een adaptieve stabiliserende eenheid draait parallel en zorgt ervoor dat, zelfs als het model onvolmaakt is of parameters driften, de gecombineerde feedback de traceringfouten begrenst en uiteindelijk naar nul drijft.
De waarnemers in de gaten houden: detectie van sensor- en actuatorstoringen
Het kader splitst de storingsafhandeling in twee gecoördineerde onderdelen. Ten eerste gebruikt een sensor-storingsunit twee aanvullende type-3 fuzzy-schatters plus een supervisieblok om af te leiden hoeveel een sensoraflezing is afgeweken van de verwachte stationaire waarde. Hiervan genereert het een correctiesignaal dat de foutieve meting als het ware tegenbuigt, zodat de hoofdregelaar een betrouwbare output blijft zien. Ten tweede bouwt de methode een virtuele structuur die het echte systeem spiegelbeeldig nabootst: deze bevat een virtuele sensor, een virtuele actuator, een eigen fuzzy-identificator en een virtuele MPC. Omdat de virtuele lus niet lijdt onder degradatie van de echte actuator, onthullen verschillen tussen het virtuele en het echte regelpad hoe slecht de echte actuator faalt. Een eenvoudige formule zet deze kloof om in een geschat storingsniveau, dat vervolgens in het hoofdstuurssignaal wordt gecompenseerd.
Stabiliteit aantonen en testen op robots en chemische tanks
Om te laten zien dat de benadering niet alleen intuïtief maar ook wiskundig solide is, construeren de auteurs een Lyapunov-functie — een soort energiemaatstaf — die traceringfouten, modelleringsfouten en de aanpasbare fuzzy-parameters omvat. Ze leiden updatewetten af voor de adaptieve termen zodat deze energie altijd afneemt, waarmee wordt aangetoond dat fouten in de loop van de tijd krimpen, zelfs bij verstoringen en storingen. Simulaties testen vervolgens de methode op twee zeer verschillende voorbeelden: een enkelvoudige robotarm en een pH-neutralisatieproces in een chemische tank. In beide gevallen worden de ware dynamica behandeld als volledig onbekend, variëren parameters en worden zowel sensor- als actuatorstoringen tijdens de werking geïnjecteerd. De regelaar behoudt nauwkeurige tracking, leert snel de omvang van storingen en houdt risico- en foutmaten laag, en presteert beter dan eenvoudigere fuzzy-regelaars en andere geavanceerde fouttolerante schema’s uit de literatuur.
Wat dit betekent voor echte systemen
Voor niet-specialisten is de kernboodschap dat deze methode complexe systemen een vorm van ingebouwd zelfbewustzijn geeft. In plaats van te vertrouwen op een perfect model of handmatige bijstelling door ingenieurs, leert de regelaar continu van de data die hij ziet, merkt wanneer sensoren of actuatoren beginnen te liegen of verzwakken, en corrigeert automatisch zijn acties om de prestaties stabiel te houden. Omdat hij alleen invoer- en uitvoergegevens nodig heeft, kan hij in principe op veel verschillende machines worden toegepast zonder alles vanaf nul te herontwerpen. Hoewel de resultaten zijn gebaseerd op simulaties en hardwareaspecten nog verder onderzocht moeten worden, wijst het werk op veerkrachtigere robots, industriële processen en andere autonome systemen die betrouwbaar blijven, zelfs wanneer hun componenten en omgevingen verre van ideaal zijn.
Bronvermelding: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Trefwoorden: fouttolerante regeling, fuzzy-logica, modelvoorspellende regeling, sensor- en actuatorstoringen, niet-lineaire systemen