Clear Sky Science · nl
Gezondheidsmonitoring van de snijarm van een ankergraver op basis van een digitale tweeling
Hoe zware machines veilig blijven
Diep onder de grond gravende machines met grote kracht kappen tunnels door gesteente zodat mensen bij steenkool en andere hulpbronnen kunnen komen. Breekt een cruciaal onderdeel onverwacht, dan staat het werk stil, zijn de reparaties kostbaar en kunnen werknemers gevaar lopen. Deze studie toont hoe een virtuele kopie van de snijarm van een tunnelingmachine — een “digitale tweeling” — de machine in real time kan volgen, kan voorspellen wanneer belangrijke onderdelen onder spanning staan of slijten, en kan helpen de operatie veiliger en efficiënter te maken.

Waarom tunnelmachines slimme zorg nodig hebben
Moderne kolenmijnen vertrouwen op geïntegreerde machines die zowel het tunnelfront afzagen als ankers in het dak plaatsen om het gesteente stabiel te houden. Deze machines werken in krappe, ruwe tunnels, hebben te maken met wisselende gesteentelagen en zware belastingen. Hun snijarmen ondergaan herhaaldelijk buigen en torsie wanneer ze liften, naar voren snijden, naar beneden trekken en langs de vloer onderuithakken. Traditioneel gebruiken ingenieurs gedetailleerde computersimulaties om deze krachten te begrijpen, maar zulke berekeningen kunnen uren duren. Dat is veel te langzaam om beslissingen te sturen terwijl de machine daadwerkelijk draait, waardoor bedieners moeten vertrouwen op vuistregels en vertraagde inspecties.
Een virtuele tweeling van de snijarm bouwen
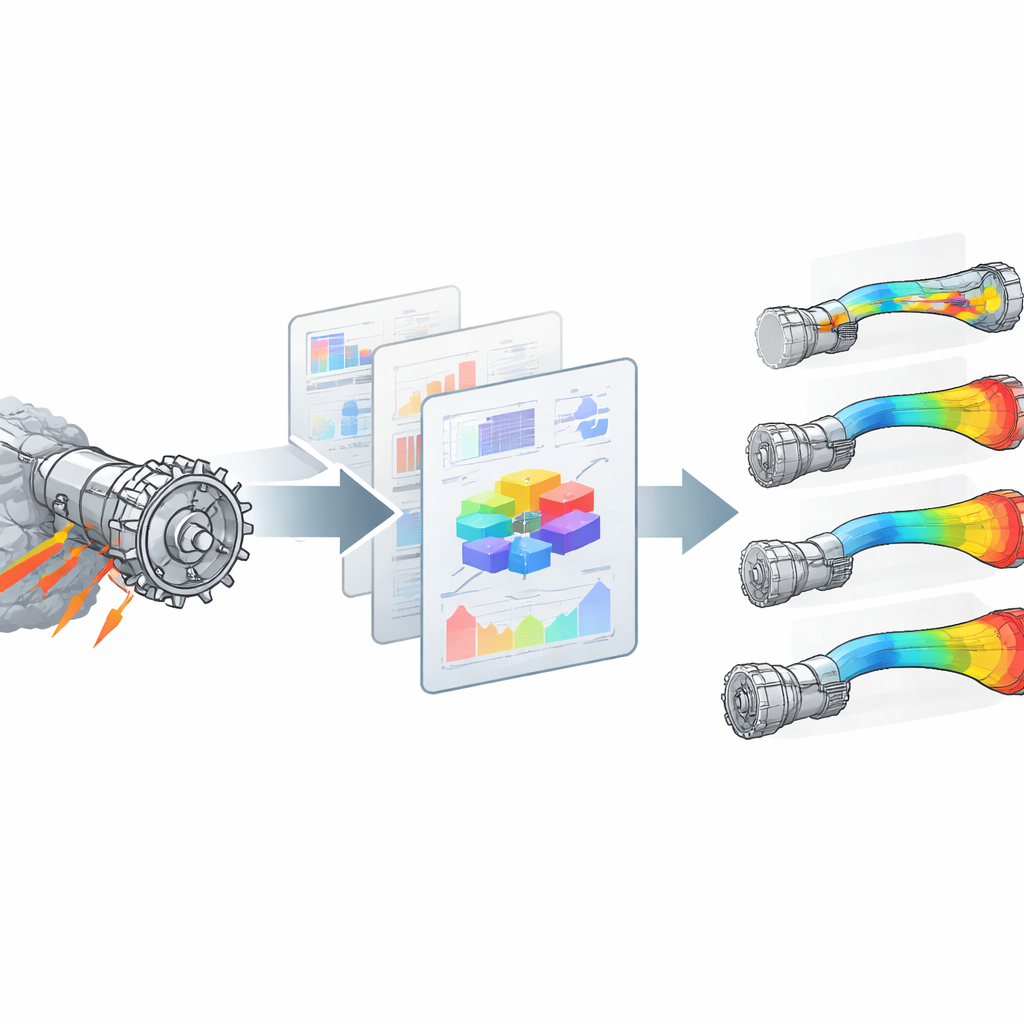
De onderzoekers wilden de snijarm een virtuele tegenhanger geven die zich als het echte deel gedraagt maar in seconden in plaats van uren kan reageren. Ze begonnen met het vereenvoudigen van een echte tunnelingmachine en bouwden een testmodel op een-eenachtste schaal. Met dit geschaalde ontwerp voerden ze gedetailleerde computersimulaties uit van de snijarm onder de belangrijkste bedrijfsscenario’s: liften, het in de kolenwand snijden, naar beneden trekken en onderuithakken langs de vloer. Deze simulaties toonden hoe krachten van de draaiende trommel in de arm en verder in de machine worden doorgegeven en waar het metaal van de arm de hoogste spanningen ondervindt.
Een snelle vervanger leren langzame berekeningen te imiteren
Aangezien het uitvoeren van volledige simulaties voor elk moment van de werking te traag is, trainde het team een “surrogaat”model — een wiskundige vervanger die spanningspatronen bijna direct kan voorspellen. Ze namen zorgvuldig veel bedrijfsomstandigheden steekproefsgewijs op, zoals verschillende snijkrachten, armhoeken en cilinderposities, en gebruikten de resulterende simulatiedata om het surrogaatmodel te leren hoe de spanning zich over de arm verandert. Geavanceerde steekproef- en leertechnieken hielpen het model zich te concentreren op de meest kritieke, hoogbelaste gebieden terwijl het aantal trainingsgevallen beheersbaar bleef. Tests toonden aan dat de voorspellingen van het surrogaat sterk overeenkwamen met de oorspronkelijke simulaties, met slechts kleine verschillen in maximale spanning onder een breed scala aan omstandigheden.
Van spanningskaarten naar resterende levensduur
Zodra de snelle vervanger real-time spanningskaarten kon leveren, koppelde het team deze aan methoden uit de vermoeiingsanalyse, die inschatten hoe herhaalde belading het metaal geleidelijk beschadigt. Door de spanningsgeschiedenis tijdens elke snijcyclus te volgen en bekende schaderegels toe te passen, kan de digitale tweeling inschatten hoeveel bruikbare levensduur de snijarm nog heeft. Om dit zichtbaar te maken bouwden de onderzoekers een monitoringplatform in de Unity 3D-softwareomgeving. Daar is een 3D-model van de snijarm gekleurd als een weerkaart, waardoor zichtbaar wordt waar de spanningen het hoogst zijn en hoe de voorspelde resterende levensduur verandert terwijl de machine zijn lift-, snij- en onderuithakende bewegingen uitvoert.
De tweeling testen tegen de echte wereld
Het team zette hun ideeën vervolgens op de proef met een fysieke proefopstelling op een werkbank die het snijmechanisme nabootst. Ze monteerden rekstrookjes — kleine sensoren die uitrekking in het metaal meten — op sleutelpunten van de arm en voerden een reeks lift- en beladingsexperimenten uit. Bij vergelijking van deze metingen met de voorspellingen van het surrogaatmodel kwamen de algemene trends goed overeen en lagen de verschillen in spanningswaarden over het algemeen binnen aanvaardbare grenzen. Sommige plotselinge, onregelmatige gebeurtenissen waren moeilijker vast te leggen, wat aangeeft dat meer trainingsdata en een betere behandeling van zeldzame condities de nauwkeurigheid verder kunnen verbeteren.
Wat dit betekent voor veiliger tunnelen
Door gedetailleerde fysica, snelle vervangende modellen en een interactieve 3D-weergave te combineren, laat dit werk zien dat een digitale tweeling de snijarm van een tunnelingmachine in real time kan monitoren. In plaats van uren te wachten op zware simulaties of te vertrouwen op sporadische inspecties, kunnen mijnwerkers zien hoe hard de arm werkt, hoe dicht deze bij zijn grenzen is en wanneer onderhoud gepland moet worden. De aanpak verkort berekentijd aanzienlijk terwijl de fouten klein genoeg blijven voor praktisch gebruik, en biedt een route naar slimmer, veiliger en betrouwbaarder ondergronds graven.
Bronvermelding: Xie, C., Chen, X., Liu, Z. et al. Health status monitoring of cutting arm of anchor excavator based on digital twin. Sci Rep 16, 8139 (2026). https://doi.org/10.1038/s41598-026-38290-4
Trefwoorden: digitale tweeling, tunnelmachine, structurele gezondheidsmonitoring, surrogaatmodel, moeheidslevensduur