Clear Sky Science · nl
Onderzoek naar positioneringsmethode bij pakketsortering in ongeordende logistiek
Waarom slimmer pakketsorteren ertoe doet
Elke online bestelling die u plaatst zet een onzichtbare choreografie van dozen in grote logistieke centra in gang. Voordat een pakket naar uw deur kan versnellen, moet het gevonden, opgepakt, gemeten, gescand en gerouteerd worden—vaak uit een chaotische stapel met allerlei verpakkingen. Vandaag de dag berust veel van dat eerste "orde scheppen in de chaos" nog steeds op menselijke medewerkers die repetitieve, vermoeiende taken uitvoeren. Dit artikel presenteert een nieuwe op beeld gebaseerde methode die robots helpt betrouwbaar te bepalen waar ze elk pakket uit een wirwar kunnen grijpen, en zo een stap dichterbij volledig geautomatiseerde, snellere en minder arbeidsintensieve pakketsortering brengt.
Van rommelige stapels naar robotvriendelijke data
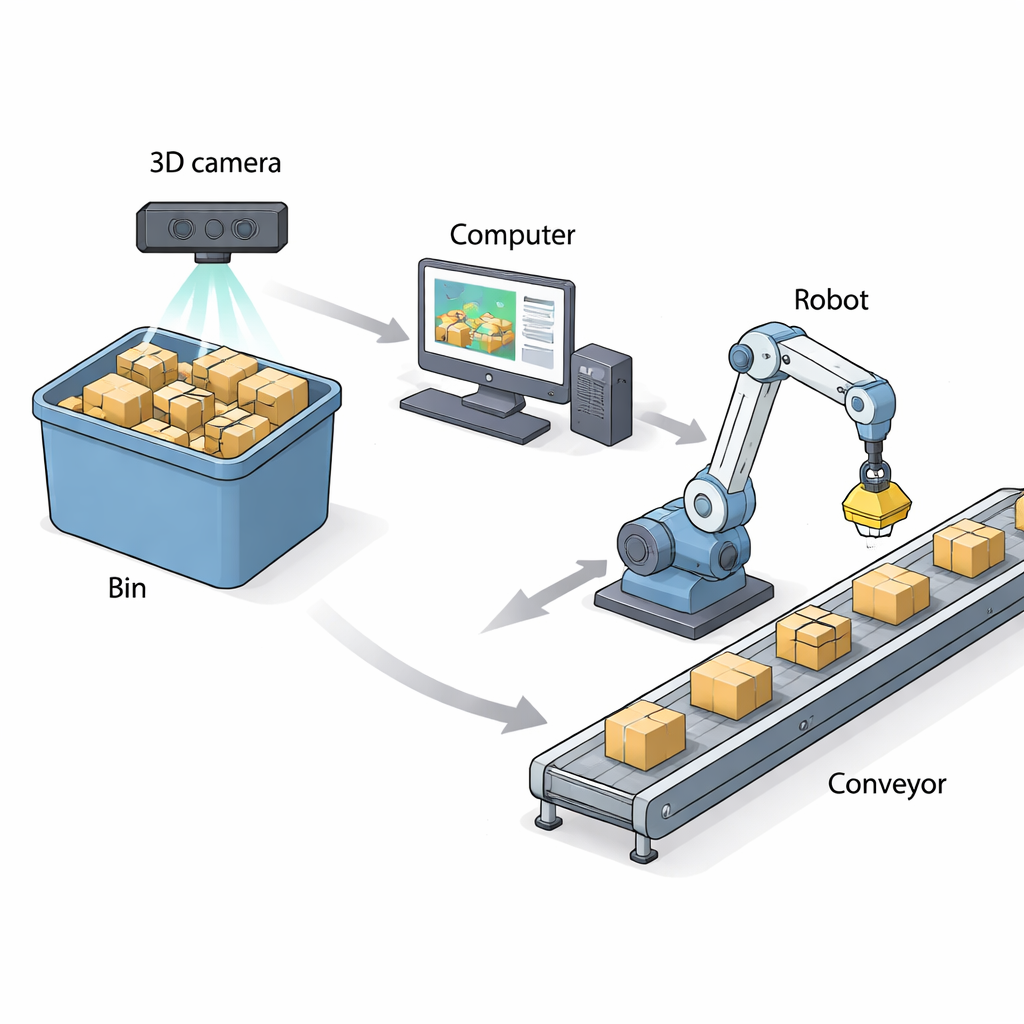
De onderzoekers richten zich op wat ze "ongeordende" logistieke pakketten noemen: alledaagse dozen en zachte enveloppen die zonder particuliere volgorde in bakken worden gegooid, soms samengedrukt of gebogen door stapeling. Om menselijke medewerkers in deze rommelige omgeving te vervangen, moet een robot eerst exact weten waar hij moet reiken en hoe hij zijn grijper op het oppervlak van een doelpakket moet oriënteren. Het team bouwt een systeem rond een 3D‑camera die zowel een kleurenbeeld als een dieptemap van de bovenste laag pakketten vastlegt. Een modern herkenningsnetwerk (gebaseerd op YOLOv8) lokaliseert individuele pakketten in het kleurenbeeld, terwijl de dieptemap hun driedimensionale vorm onthult. Deze combinatie stelt de computer in staat het beste pakket te kiezen om als volgende te grijpen—een dat niet te veel geoccludeerd is en ver genoeg van de randen van de bak ligt—voordat een nauwkeurig grijppunt wordt berekend.
Een stabiel grijppunt vinden met drie punten en een schaduw
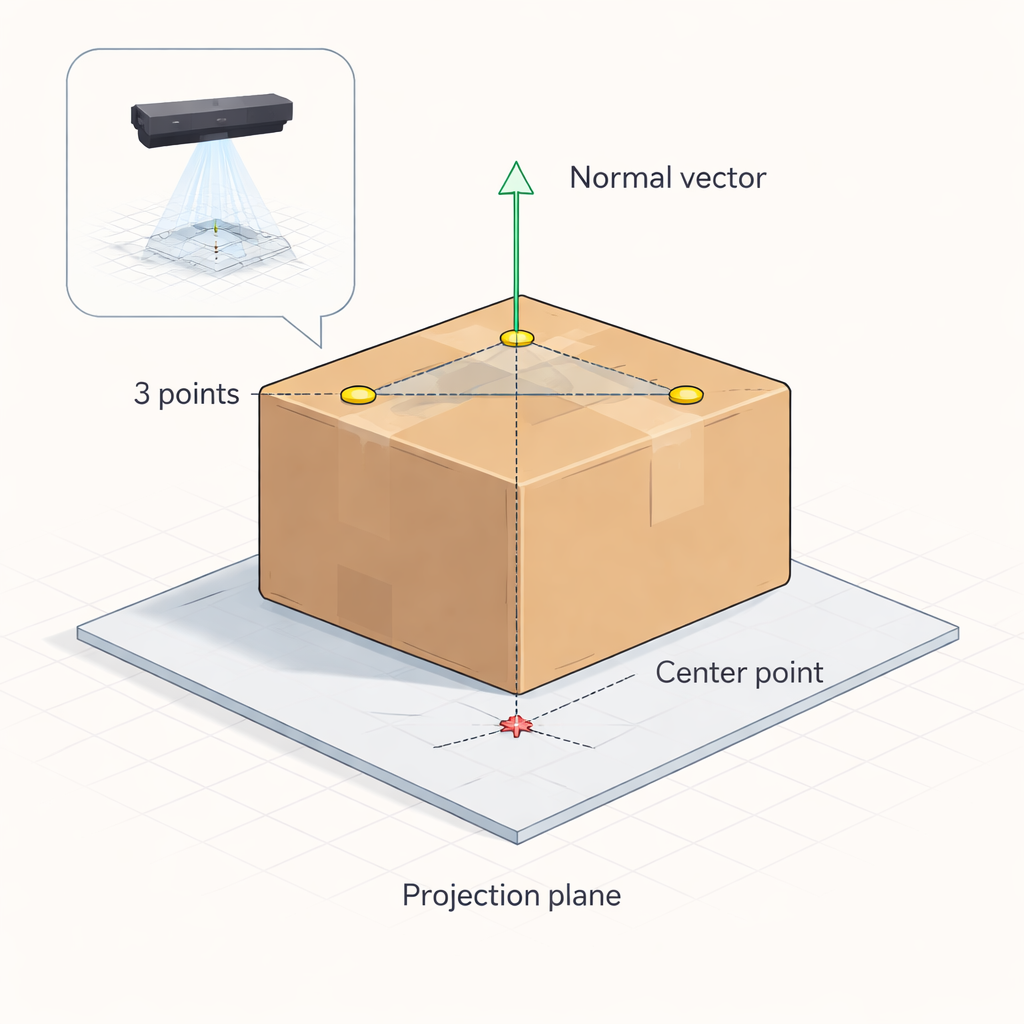
Centraal in de methode staat een geometrische truc die de auteurs een drie‑punten oriëntering‑projectie centrering noemen. Zodra een doelpakket is gekozen, selecteert het systeem willekeurig drie punten op het bovenvlak uit de dieptegegevens. Deze drie punten definiëren een vlak, net zoals drie spelden op een tafel het kantelen van die tafel bepalen. Uit dit vlak berekent het algoritme een "normaal"—een rechte lijn die loodrecht uit het oppervlak van het pakket steekt. Tegelijk gebruikt het systeem de vier bovenste hoeken van het pakket in het beeld om het geometrische midden van de geprojecteerde omtrek af te leiden, vergelijkbaar met het vinden van het midden van de schaduw van een rechthoek. Door de oriëntatie van het vlak te combineren met deze middenpositie ontstaat een precieze 3D‑grijplocatie en de helling van het bovenvlak van het pakket, wat vervolgens een robotzuignap of grijper kan aansturen.
Omgaan met ingedrukte en bolle verpakkingen
Werkelijke pakketten zijn geen perfecte blokken: bubbeltjesfolie‑enveloppen hangen door, zachte zakken zwellen op en kartonnen dozen kunnen vervormen onder belasting. Een eenvoudige aanname van een vlak oppervlak faalt in deze gevallen. Om dit aan te pakken, breiden de auteurs hun wiskunde uit om drie situaties te onderscheiden: bijna vlakke pakketten, convexe (bolle) toppen en concaaf (doorhangende) oppervlakken. Door de hoogste en laagste dieptewaarden op het oppervlak van een pakket te vergelijken, beslist het systeem eerst of het aanzienlijk vervormd is. Zo ja, dan analyseert het hoe het vervormde oppervlak een denkbeeldig referentievlak snijdt en past het een benaderende ellips aan die snijlijn. Daarmee lost het een "optimale" vlak op dat het beste een stabiel grijpoppervlak vertegenwoordigt—zelfs als het echte bovenvlak doorhangt of bol staat—en projecteert vervolgens het sleutelgrijppunt terug op dat vlak.
Het algoritme op de proef gesteld
Om te controleren of de wiskunde in de praktijk werkt, bouwde het team een testopstelling met een zessassige industriële robot, een 3D‑camera en een aangepaste laser‑en‑probe‑apparatuur. Eerst markeerden ze het ware geometrische midden van het bovenvlak van elk testpakket en gebruikten twee laserstralen om die fysieke locatie in de ruimte exact te bepalen. Daarna liet men hun zichtalgoritme een eigen schatting van hetzelfde midden berekenen en commandeerde de robot om een tweede probe naar dat berekende punt te verplaatsen. Door de kleine afwijking tussen de twee proptips te meten, konden ze de positioneringsfout berekenen. Tests met zowel stijve houten doosmodellen als realistische verpakkingsmaterialen—golfkartonnen dozen, bubbeltjesenveloppen en plastic zakken, in formaten tot 250×250 mm—wezen op een maximale positioneringsfout van circa 1,7 millimeter en gemiddelde fouten dicht bij 1 millimeter per as. De volledige berekening per pakket nam ongeveer 17,5 milliseconden in beslag, snel genoeg voor hoogdoorvoersorteerbanen.
Wat dit betekent voor toekomstige magazijnen
Kort gezegd toont de studie aan dat een robot uitgerust met een 3D‑camera en dit drie‑punten, projectie‑gebaseerde algoritme betrouwbaar kan bepalen waar en hoe pakketten uit een rommelige bak met millimeternauwkeurigheid te grijpen. Hoewel sterke vervormingen bij zeer zachte pakketten de nauwkeurigheid enigszins verminderen, blijft de methode robuust genoeg voor realistische magazijnomstandigheden. Nu het aantal pakketten blijft stijgen en personeelstekorten aanhouden, zouden dergelijke algoritmen de zwaarste en meest repetitieve sorteertaken van mensen naar machines kunnen verschuiven—waardoor het werk veiliger en minder eentonig wordt en de groeiende wereld van e‑commerce soepel blijft draaien.
Bronvermelding: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Trefwoorden: 3D‑zicht, pakketsortering, robotisch grijpen, logistieke automatisering, objectlokalisatie