Clear Sky Science · nl
Integratie van vereenvoudigde Swin-T met aangepaste EFS-Net voor aandachtgestuurde segmentatie van onderwaterleidingen in complexe onderwateromgevingen
Waarom het observeren van de zeebodem ertoe doet
Verborgen onder de golven vervoeren uitgestrekte netwerken van pijpen olie, gas en stroomkabels waarop moderne samenlevingen vertrouwen. Als deze onderwaterleidingen barsten, corroderen of verschuiven, kan dat leiden tot kostbare stilleggingen en ernstige vervuiling. Tegenwoordig wordt veel inspectiewerk uitgevoerd door mensen die urenlang troebele video van onderwaterrrobots bekijken. Dit artikel presenteert een nieuw kunstmatig-intelligentiesysteem (AI) dat automatisch leidingen kan herkennen in zware onderwaterbeelden, zelfs wanneer ze zwak verlicht zijn, bedekt met «zeezand» of gedeeltelijk in het zand begraven. Deze stap richting betrouwbare, geautomatiseerde inspectie kan offshore energie en infrastructuur veiliger en goedkoper in onderhoud maken.
Helder zien in een troebele wereld
Onderwaterbeelden zijn berucht lastig voor computers om te interpreteren. Licht neemt snel af met diepte, kleuren verschuiven naar groen en blauw, en zwevende deeltjes veroorzaken nevel en sneeuwachtige spikkels. Klassieke beeldtechnieken, die vertrouwen op scherpe randen en duidelijk contrast, falen vaak wanneer de leiding bedekt is met zand, verhuld door planten of vervaagd door mist. Deep learning heeft verbeteringen gebracht, en verschillende populaire neurale netwerken kunnen leidingen al herkennen in specifieke datasets. Toch specialiseren die systemen zich meestal in één type waterconditie of cameraprotocol. Als ze een nieuwe omgeving tegenkomen—ander water, andere belichting of achtergrond—daalt hun nauwkeurigheid sterk. De kernuitdaging is een model te bouwen dat zowel nauwkeurig als aanpasbaar is, en tegelijk efficiënt genoeg om in praktische inspectiesystemen te draaien.
Een tweekoppige aanpak voor onderwaterbeelden
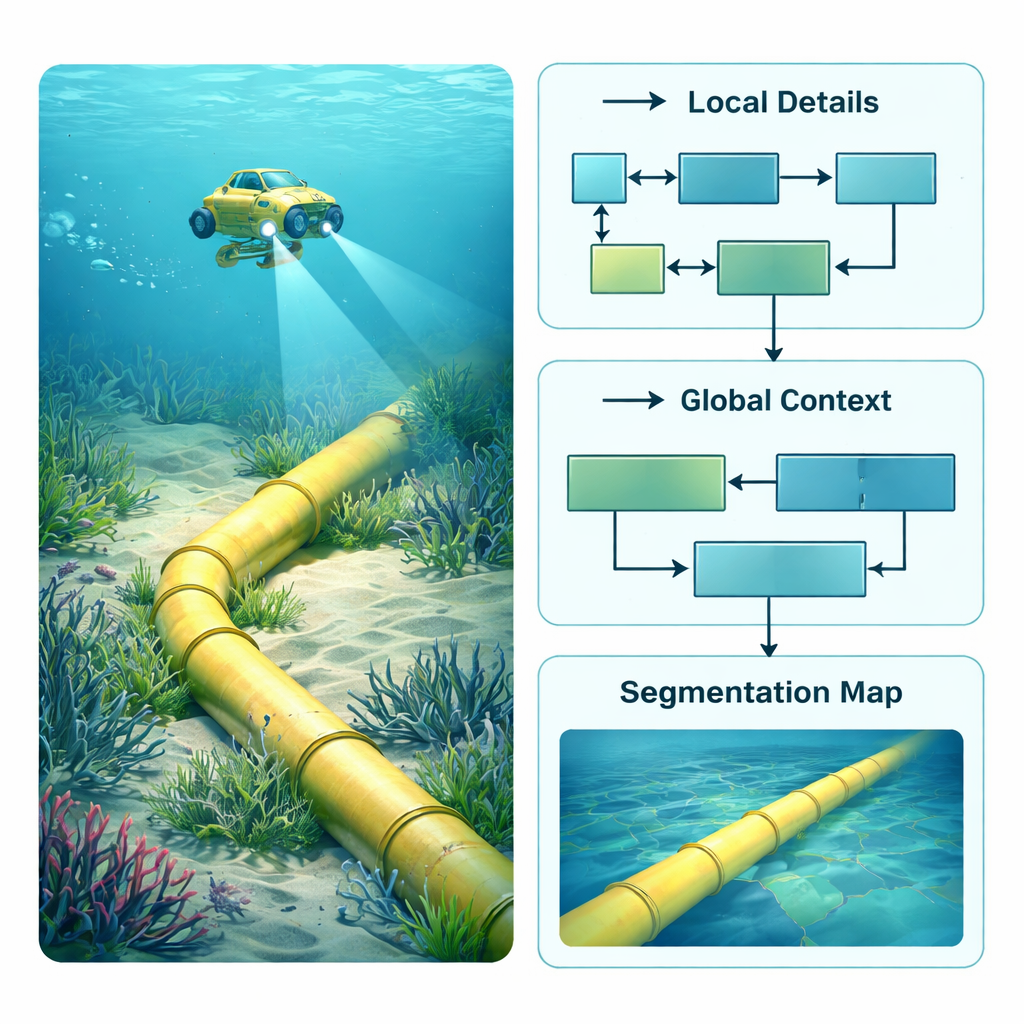
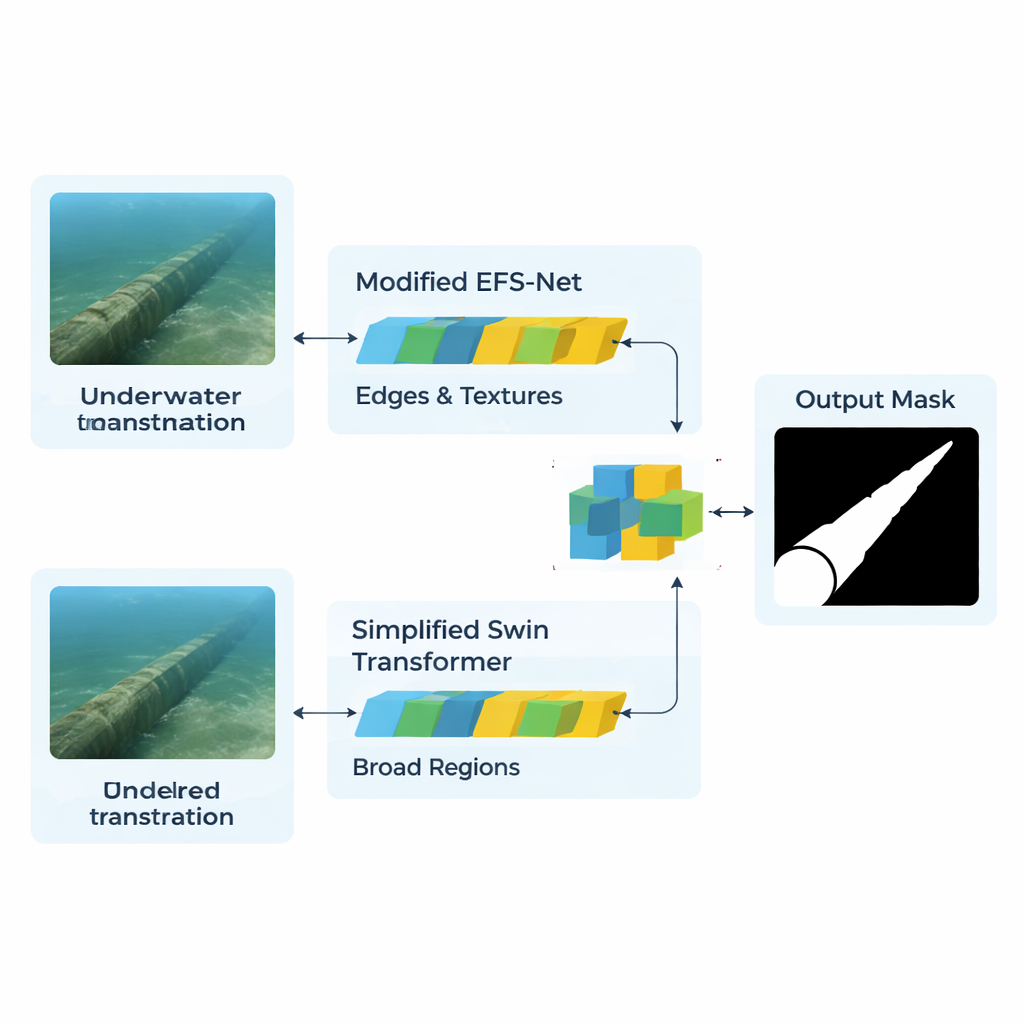
De auteurs pakken dit aan met een hybride AI-architectuur die twee zeer verschillende «manieren van zien» combineert. De ene tak, gebaseerd op een gestroomlijnde versie van de Swin Transformer, fungeert als brede waarnemer. Hij scant het hele beeld om grootschalige patronen te begrijpen, zoals de algemene route van een leiding over de zeebodem. De tweede tak, afgeleid van een model genaamd EFS-Net en aangedreven door een EfficientNet-backbone, werkt als een vergrootglas. Die concentreert zich op fijne details—randen, texturen en dunne structuren die aangeven waar de leiding begint en waar zand of begroeiing eindigt. Beide takken verwerken dezelfde resized beelden en zetten die om in interne featuremaps die beschrijven welke structuren het netwerk mogelijk relevant acht in elk deel van de afbeelding.
Het laten beslissen van aandacht wat telt
Gewoon de outputs van deze twee takken stapelen zou een kluwen van redundante informatie opleveren. In plaats daarvan gebruikt het model een «attention»-mechanisme om per pixel te beslissen welke details de aandacht verdienen. Een driehoofdige cross-attentionmodule vergelijkt de features van de detailgerichte tak met die van de contextgerichte tak. In wezen stelt de detailtak gerichte vragen—«Is deze rand onderdeel van een leiding?»—terwijl de contexttak globale aanwijzingen levert—«Maakt een lijn op deze positie en in deze richting zin als onderdeel van een leiding?» Een aanvullende verfijningsstap, CBAM genoemd, versterkt verder het signaal van waarschijnlijke leidingregio’s en dempt achtergrondruis zoals rotsen, algen of zwevende deeltjes. Een decoder-netwerk bouwt vervolgens geleidelijk een masker op volledige grootte op dat elke pixel markeert als leiding of niet.
Het systeem aan een test onderwerpen
Om te beoordelen of dit ontwerp in de praktijk werkt, stelden de onderzoekers een grote en veeleisende dataset samen met de naam HOMOMO. Die bevat meer dan 120.000 kleurbeelden van echte zeebodemleidingen, genomen langs 1,2 kilometer pijpleiding onder gevarieerde en vaak vijandige omstandigheden: weinig licht, zeemist, zwevende «sneeuw», zandverstuivingen en zware plantengroei. Ze trainden hun model op een deel van deze verzameling en vergeleken het vervolgens met veelgebruikte systemen zoals UNet, DeepLab, SwinUNet, TransUNet, Mask2Former en meerdere versies van de YOLO-objectdetector. Op HOMOMO segmenteerde hun hybride model de leidingpixels correct met een gemiddelde intersection-over-union van ongeveer 98%, aanzienlijk hoger dan de beste concurrerende methode. Even belangrijk: bij tests—zonder hertraining—op twee heel verschillende beeldbronnen, een synthetische Roboflow-dataset en echte YouTube-beelden, bleef het model goed presteren, wat aantoont dat het kan omgaan met nieuwe camera’s en watercondities.
Wat dit betekent voor de echte oceaan
Voor niet-specialisten is de conclusie dat dit AI-systeem betrouwbaar onderwaterleidingen kan omlijnen in videoframes die te ruisig en inconsistent zijn voor conventionele methoden. Door een globaal beeld van de scène te combineren met een scherp oog voor randen en texturen, en door aandacht te gebruiken om deze perspectieven te verenigen, bereikt het model hoge nauwkeurigheid zonder enorme rekenkracht te vereisen. In praktische termen kan zo’n hulpmiddel autonome robots helpen om continu lange stuken onderzeese infrastructuur te bewaken en mogelijke schade of begraving voor menselijke controle aan te geven. Hoewel het nog steeds moeite heeft met extreem dunne of volledig verborgen leidingen, is de aanpak een belangrijke stap richting veiligere, meer geautomatiseerde inspectie van het verborgen leidingennetwerk dat moderne energie- en communicatienetwerken ondersteunt.
Bronvermelding: Hosseini, N., Mohanna, F. & Moghimi, M.K. Integrating simplified Swin-T with modified EFS-Net for attention-guided underwater pipelines segmentation in complex underwater environments. Sci Rep 16, 6987 (2026). https://doi.org/10.1038/s41598-026-38081-x
Trefwoorden: onderwaterleidingen, beeldsegmentatie, deep learning, mariene inspectie, transformernetwerken