Clear Sky Science · nl
Herschikbare analyse en werkruimteoptimalisatie van een modulaire kabel‑opgehangen parallélrobot
Robots die over onzichtbare rails reizen
Stel je een robot voor die een zware camera soepel door een stadion kan laten glijden, bouwmaterialen over een bouwplaats kan hijsen of een revalidatieapparaat rond een patiënt kan leiden, terwijl hij aan kabels hangt in plaats van op stijve armen te rijden. Dit artikel introduceert een nieuw soort kabel‑opgehangen robot waarvan de structuur naar behoefte kan worden hervormd, waardoor één machine zich aan veel verschillende taken kan aanpassen en tegelijk de nuttigste bewegingen uit haar werkruimte kan persen.
Een robot bouwen uit verwisselbare onderdelen
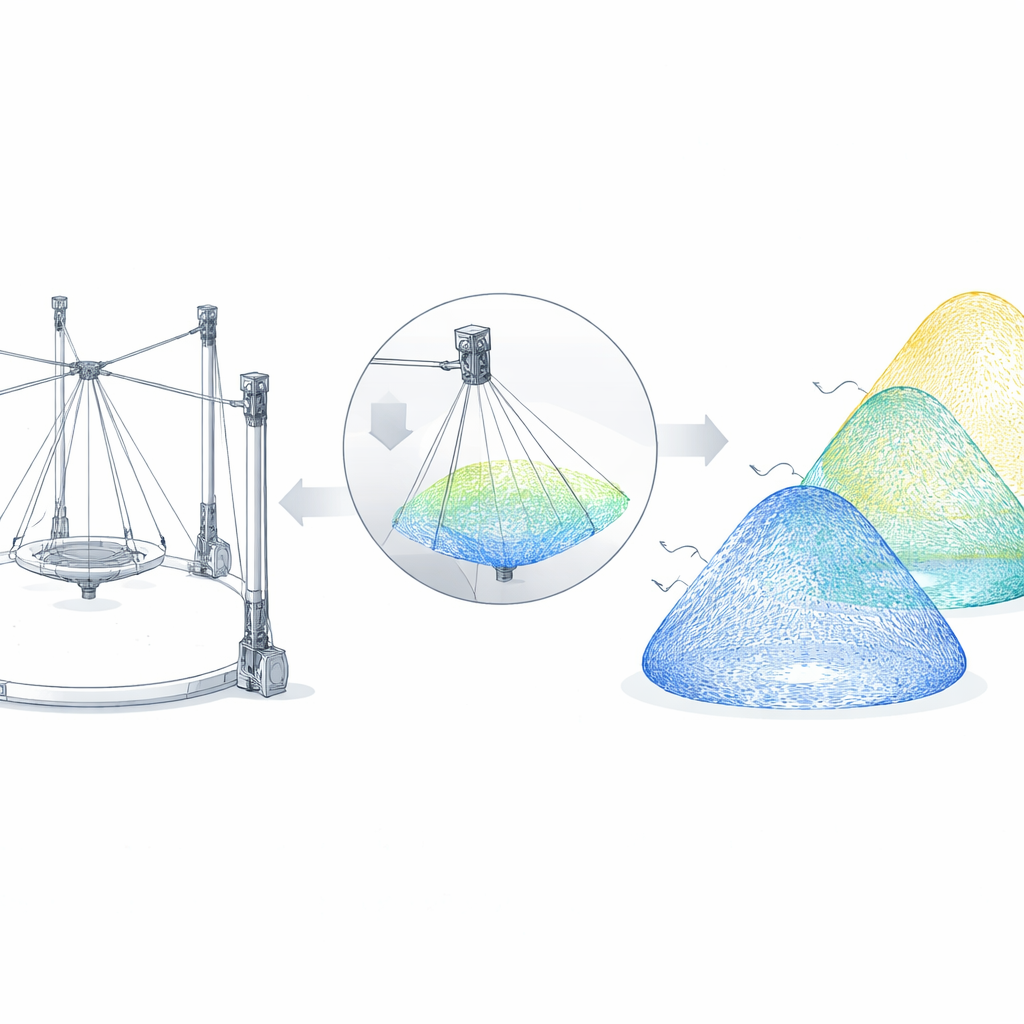
Centraal in de studie staat een modulaire kabel‑opgehangen parallellrobot (MCSPR). In plaats van vaste metalen armen gebruikt hij tot zes identieke 'takken', elk een toren met motoren, katrollen en een kabel die verbonden is met een centraal bewegend platform, het eindstuk. Deze takken staan rond een cirkelvormige geleider en kunnen worden toegevoegd, verwijderd, gedraaid of omhoog en omlaag gebracht. Door ze opnieuw te rangschikken kan dezelfde hardware zich als verschillende robots gedragen: met twee takken beweegt hij in een vlak, met drie of vier kan hij vrij in de ruimte bewegen, en met vijf of zes kan het platform ook in meerdere richtingen kantelen en roteren.

Het skelet plannen van een vormveranderende machine
Het ontwerpen van zo’n flexibel systeem is meer dan het vastschroeven van onderdelen. De auteurs gebruiken een systematische "structurele synthese"‑aanpak, waarbij elke kabel, katrol en scharnier als een basiselement in een netwerk wordt behandeld. Met grafiekachtige diagrammen brengen ze in kaart hoe deze elementen met elkaar verbonden zijn zodat het platform de gewenste bewegingsvrijheden krijgt — zoals schuiven langs drie assen of roteren eromheen. Dit overzicht van modules en verbindingen dient als een ontwerpgereedschap: afhankelijk van de beweging die een taak vereist kan een ontwerper kiezen hoeveel takken te gebruiken en waar ze op de cirkelgeleider te plaatsen, in de zekere wetenschap dat de resulterende structuur zich zal gedragen zoals bedoeld.
Weten welke kant het platform op beweegt
Aangezien het platform aan kabels hangt die alleen kunnen trekken en niet duwen, is het voorspellen van zijn beweging complexer dan bij traditionele robots. Het team ontwikkelt een uniforme wiskundige beschrijving die voor alle vijf hoofdconfiguraties van de MCSPR werkt. Voor een gewenste positie en oriëntatie van het platform berekenen ze precies hoe lang elke kabel moet zijn en hoe snel die lengte moet veranderen. Vervolgens bouwen ze een fysiek prototype en sturen ze het platform een vloeiend spiraalpad door de ruimte te volgen. Sensoren langs de kabels registreren de daadwerkelijke bewegingen, die nauw overeenkomen met de voorspellingen. Dit bevestigt dat het model de robot betrouwbaar kan sturen, zelfs wanneer zijn geometrie wordt herschikt.
Vinden waar de robot veilig stil kan hangen
Even belangrijk is begrijpen waar het opgehangen platform in balans kan blijven. Als een kabel slap raakt, gaat de controle verloren. De auteurs richten zich op wat zij het statische evenwichts‑werkgebied noemen: het deel van de ruimte waar alle kabels onder positieve spanning kunnen blijven terwijl alleen de zwaartekracht op het platform werkt. Met een Monte‑Carlo‑benadering nemen ze willekeurig veel mogelijke posities en oriëntaties van het platform en controleren ze voor elk of de kabelspanningen die nodig zijn om die houding vast te houden binnen veilige grenzen vallen. De geaccepteerde monsters vormen een driedimensionale wolk die het werkvolume aangeeft dat de robot tot zijn beschikking heeft.
Het bereik van de robot vergroten door slimme afstemming
Aangezien de takken van de MCSPR in hoogte en hoek kunnen variëren en het platform lasten van verschillende massa’s en kantelhoeken kan dragen, zijn grootte en vorm van dit veilige volume niet vast. De onderzoekers variëren deze factoren systematisch in een opstelling met zes takken. Ze tonen aan dat een zwaardere lading het gebied waarin de robot stil kan staan sterk verkleint, terwijl slimme keuzes van takhoogten en hoekafstand dit gebied kunnen vergroten. Daarna formuleren ze een optimalisatieprobleem: pas de lading, takhoogten, takhoeken en het kantelbereik van het platform aan om het volume van de veilige werkruimte te maximaliseren. Door deze zoekopdracht in software uit te voeren vinden ze een configuratie waarin de bereikbare, gebalanceerde ruimte meerdere malen groter is dan in een simpele opstelling.
Waarom dit ertoe doet voor echte toepassingen
Voor niet‑specialisten is de kernboodschap dat deze robot vrijwel als een constructieset kan worden hervormd, en toch met precisie kan worden geanalyseerd en afgestemd. Door modulaire hardware te combineren met zorgvuldige wiskundige planning en computergebaseerde zoekmethoden veranderen de auteurs één kabel‑opgehangen machine in een veelzijdig platform dat aan veel taken kan worden aangepast — van precisieproductie tot revalidatie — terwijl het zijn werkruimte optimaal benut en lasten veilig ondersteunt.
Bronvermelding: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Trefwoorden: kabelrobots, modulaire robotica, herschikbare mechanismen, robotwerkruimte, parallelle manipulatoren